 deʃhipu
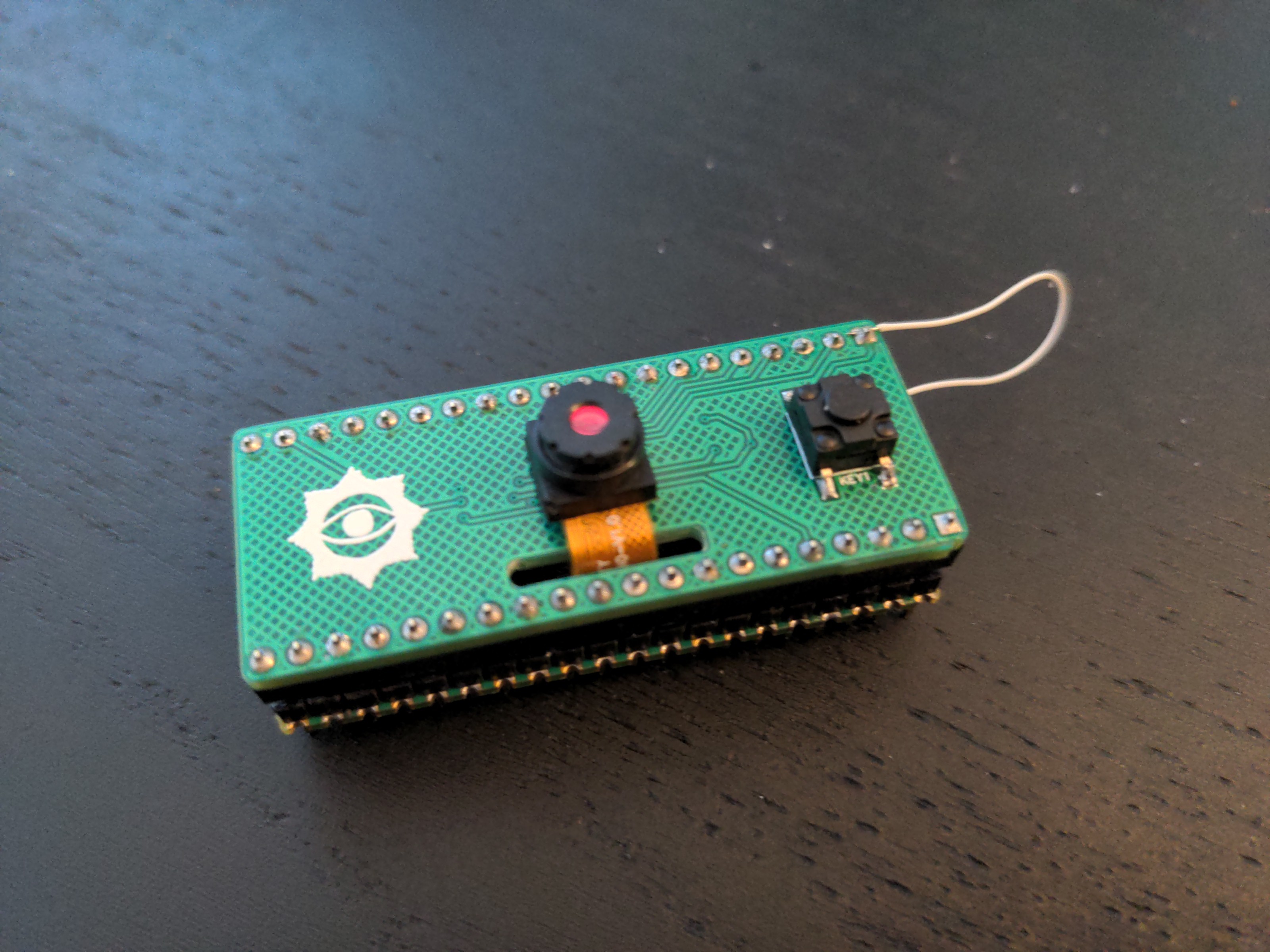
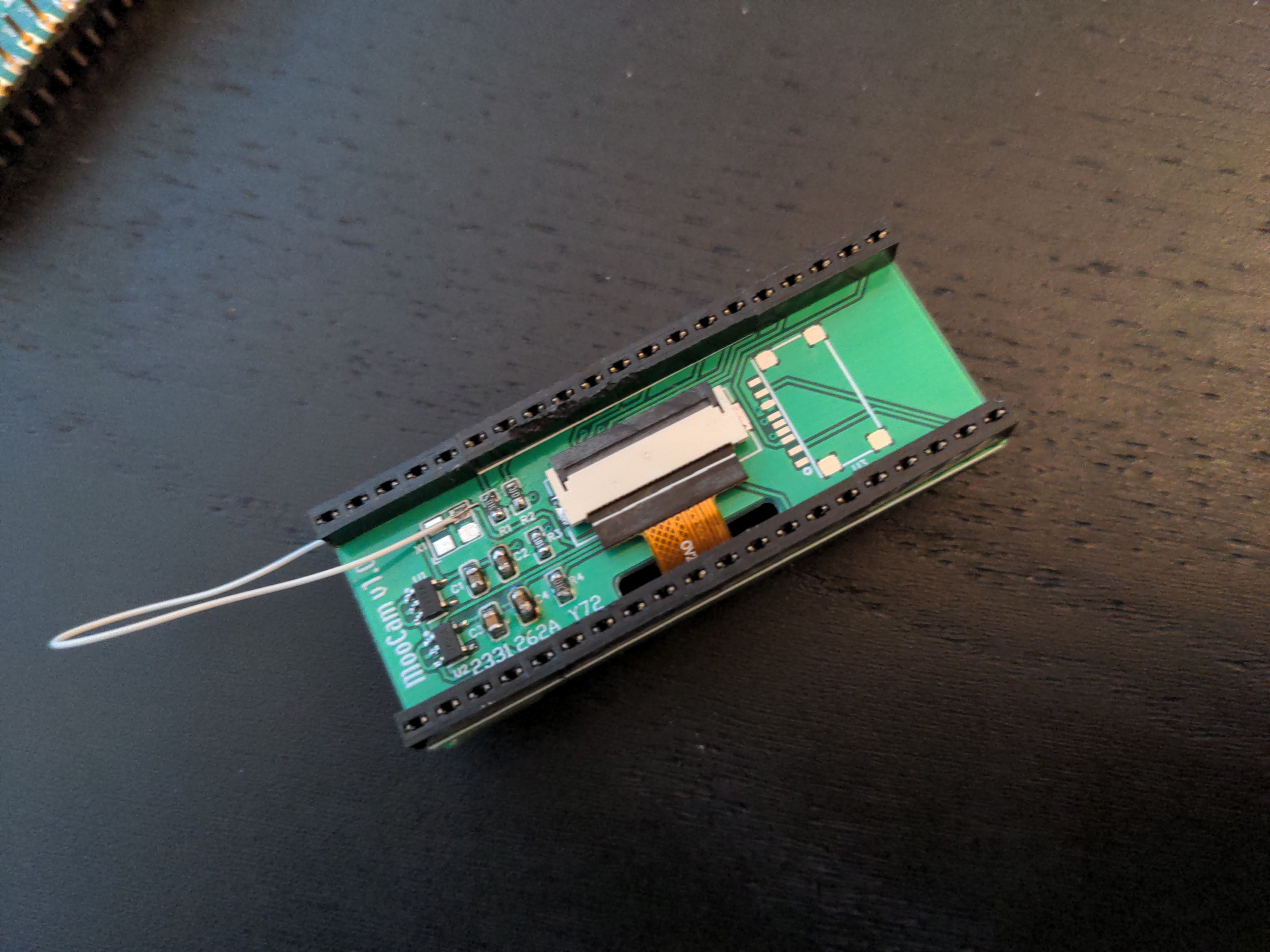
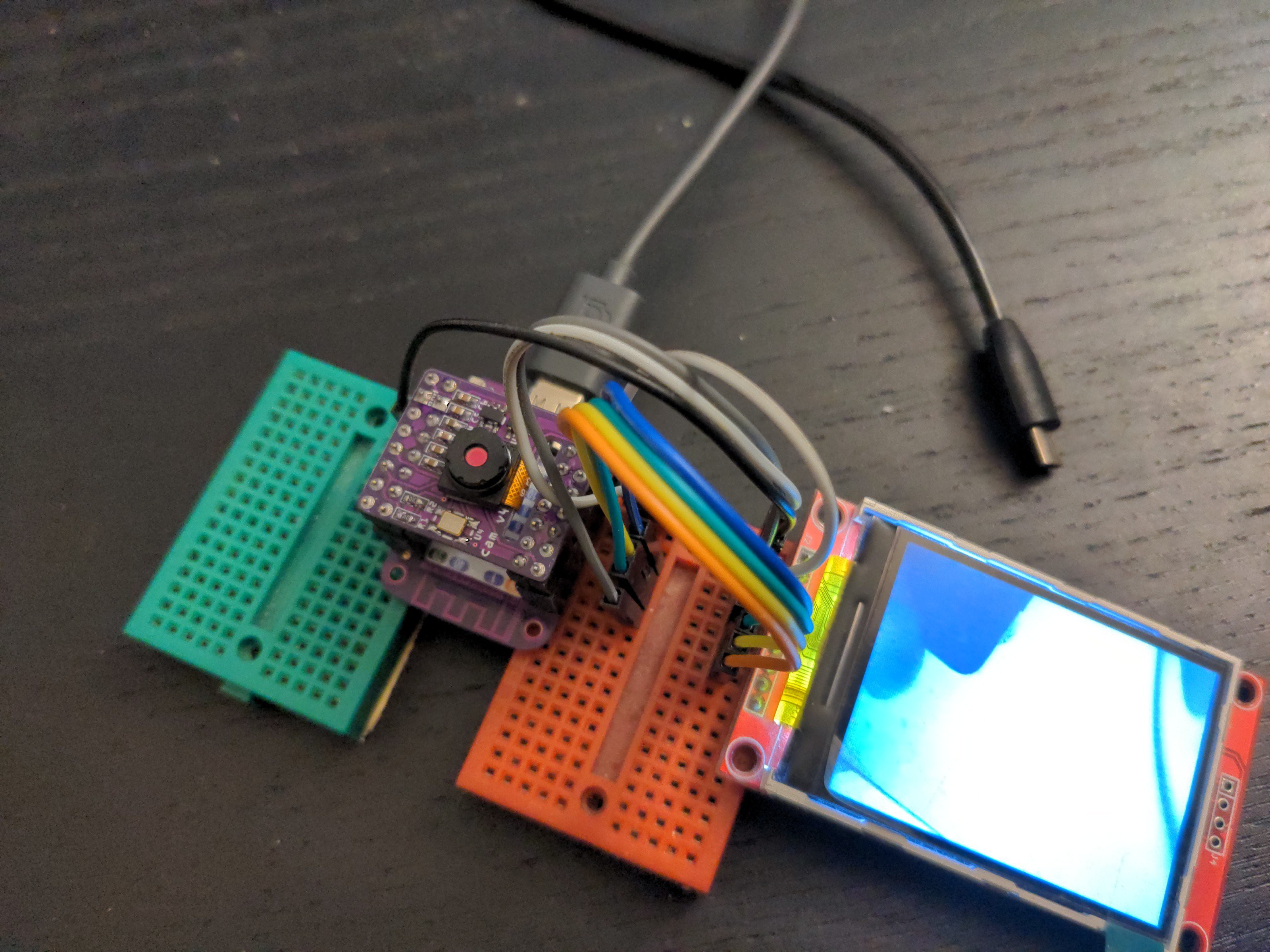
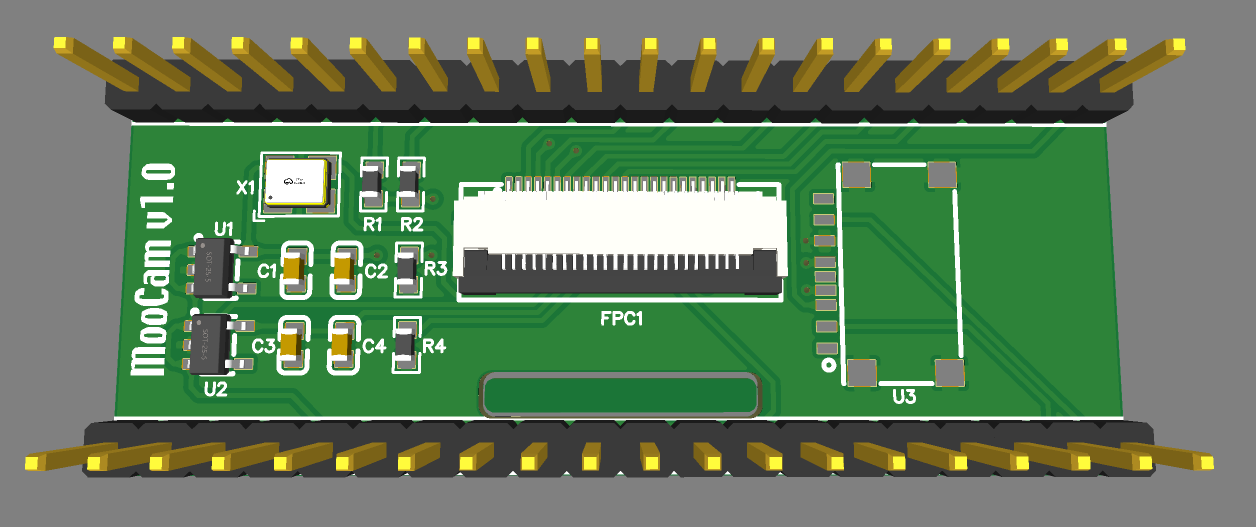
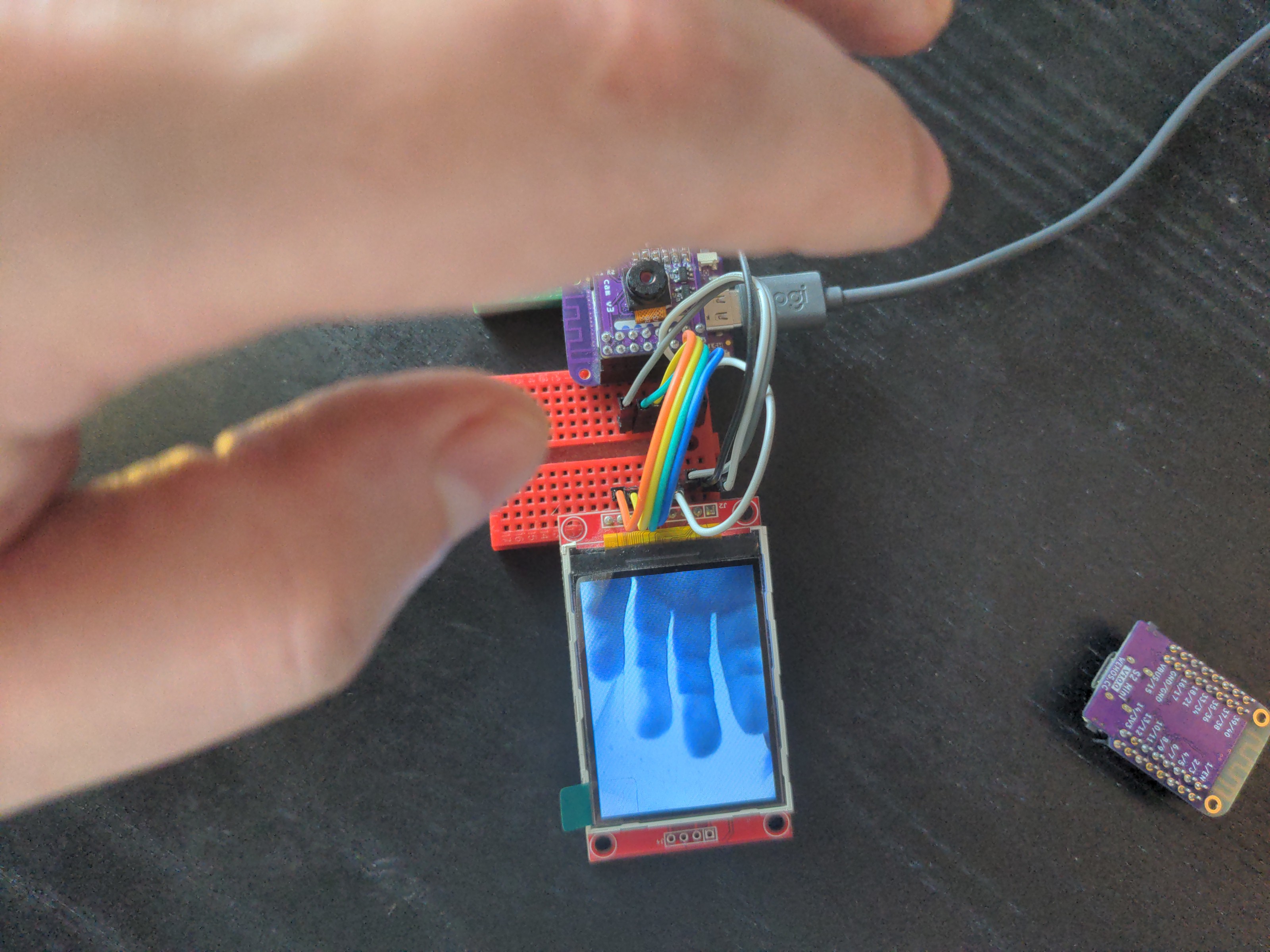
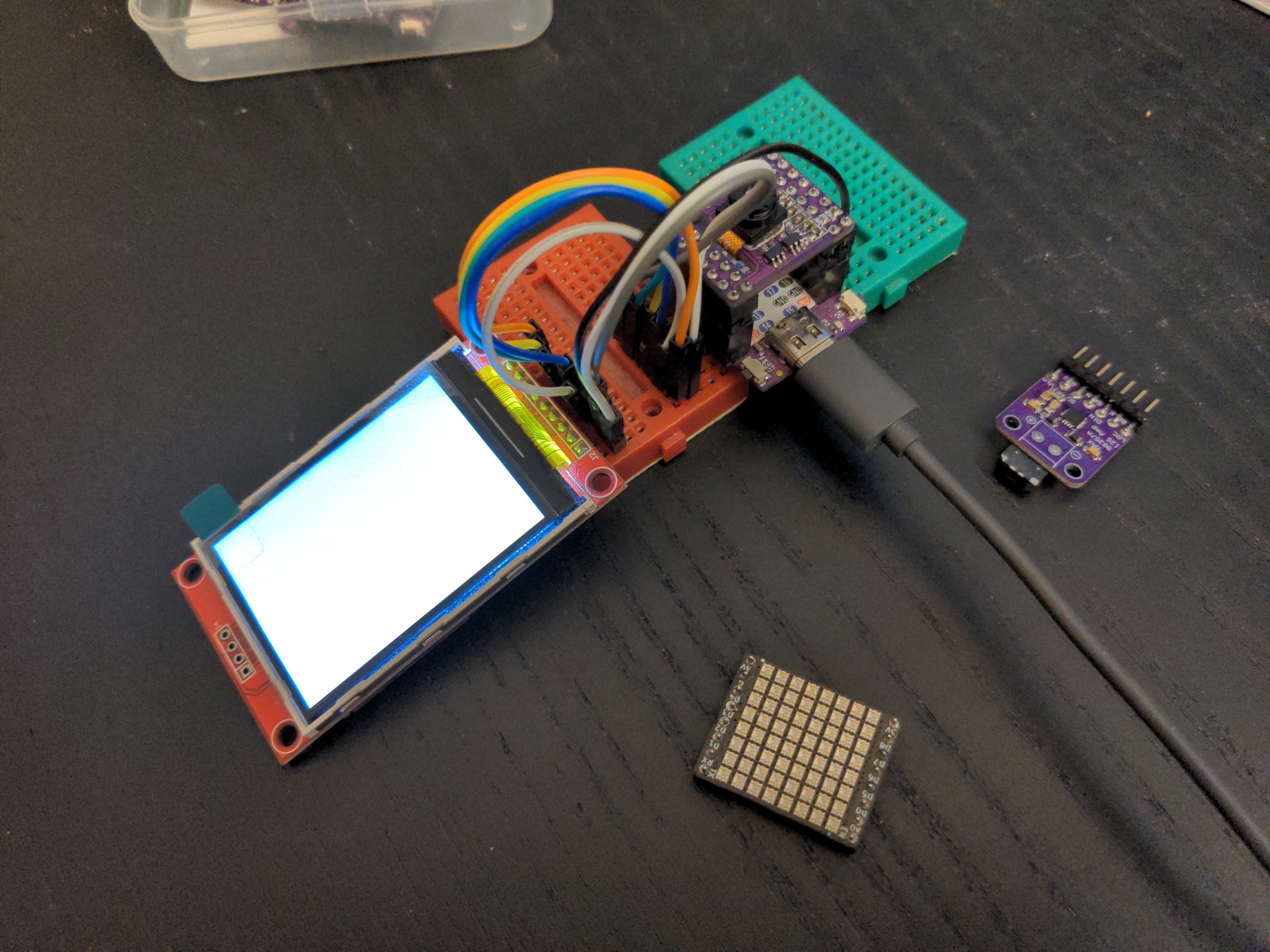
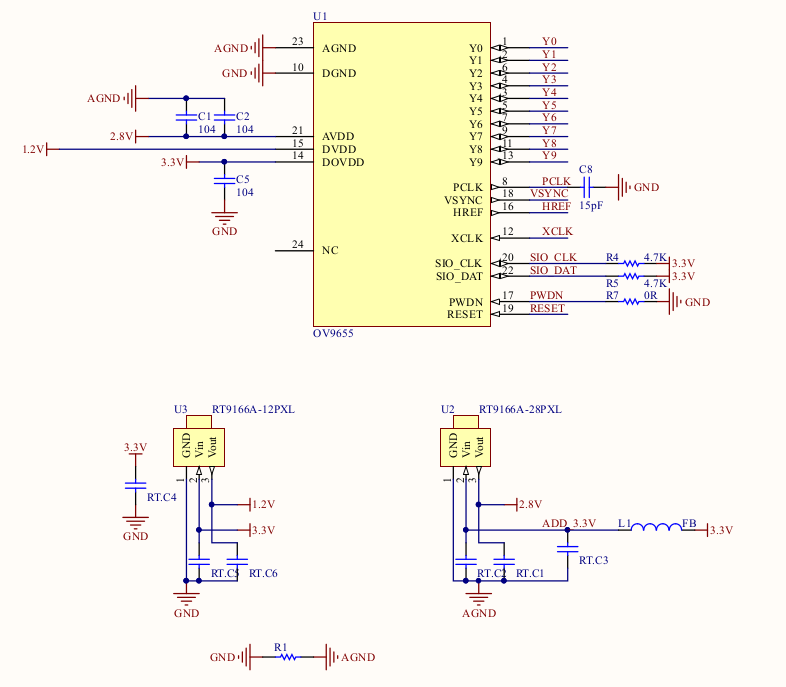
deʃhipuWith CircuitPython now supporting a camera, it would be nice to have a camera shield to use with my robot #Fluffbug. The OV2640 camera module is pretty powerful (it can create JPEG data to stream), and the S2 Mini has enough pins to drive it, so the only inconvenience left are three voltages need for powering the camera. The shield takes care of that.
0%
0%
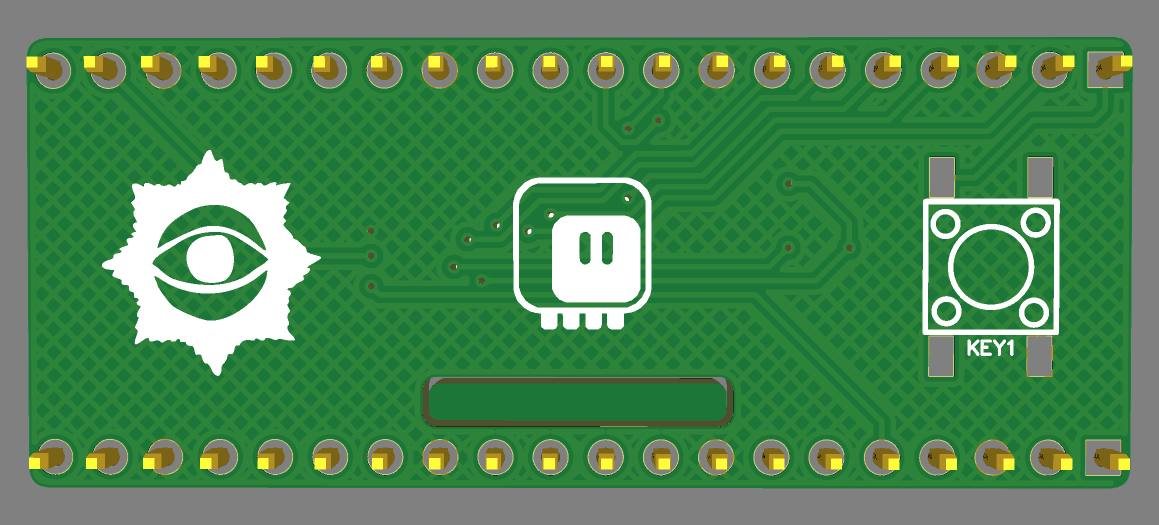
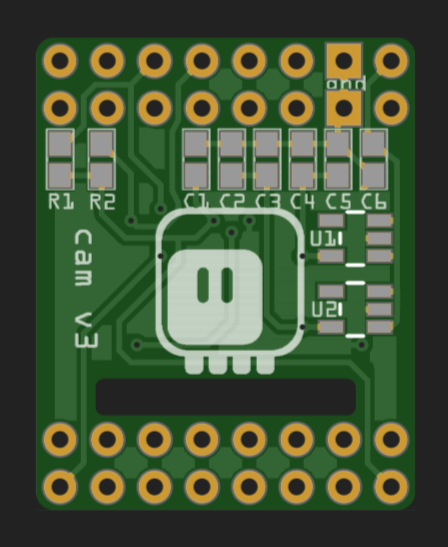
Camera Shield for S2 Mini
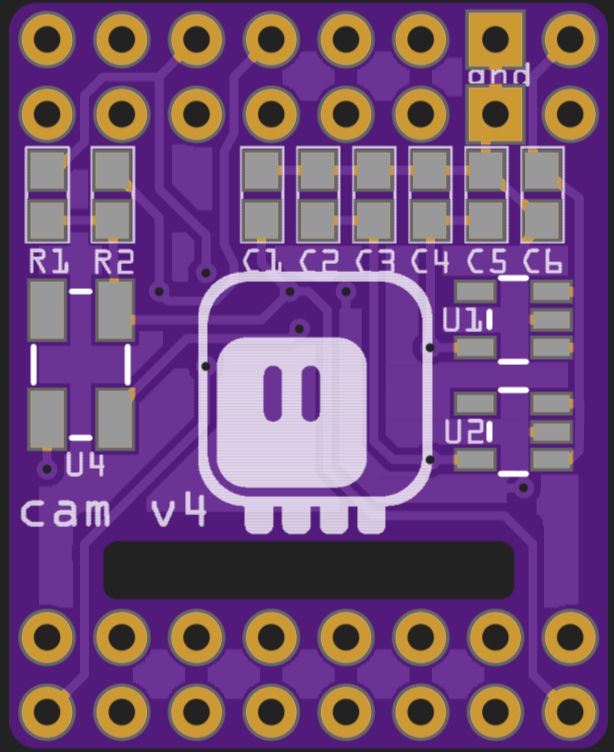
OV2640 shield for the S2 Mini ESP32-S2 board.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 J.C. Nelson
J.C. Nelson

 davedarko
davedarko
 Martin Fasani
Martin Fasani
Hi! is this version of the camera working? It´s there a way to send the image to a processing sketch? I have some openCV sketches to "interact" with ants or other bugs that I would like to try. Thanks for the camera. Amazing project!