 deʃhipu
deʃhipuA bit of explanation is needed here. Obviously an ESP32-S2 is not going to be able to do much with a camera, lacking the processing power and memory. I hope to make it stream low-resolution video over WiFi, and maybe, if in the right light conditions, find color blobs at one frame per 10 seconds.
Oh, of course I want to put it on my robot, here's a mockup:
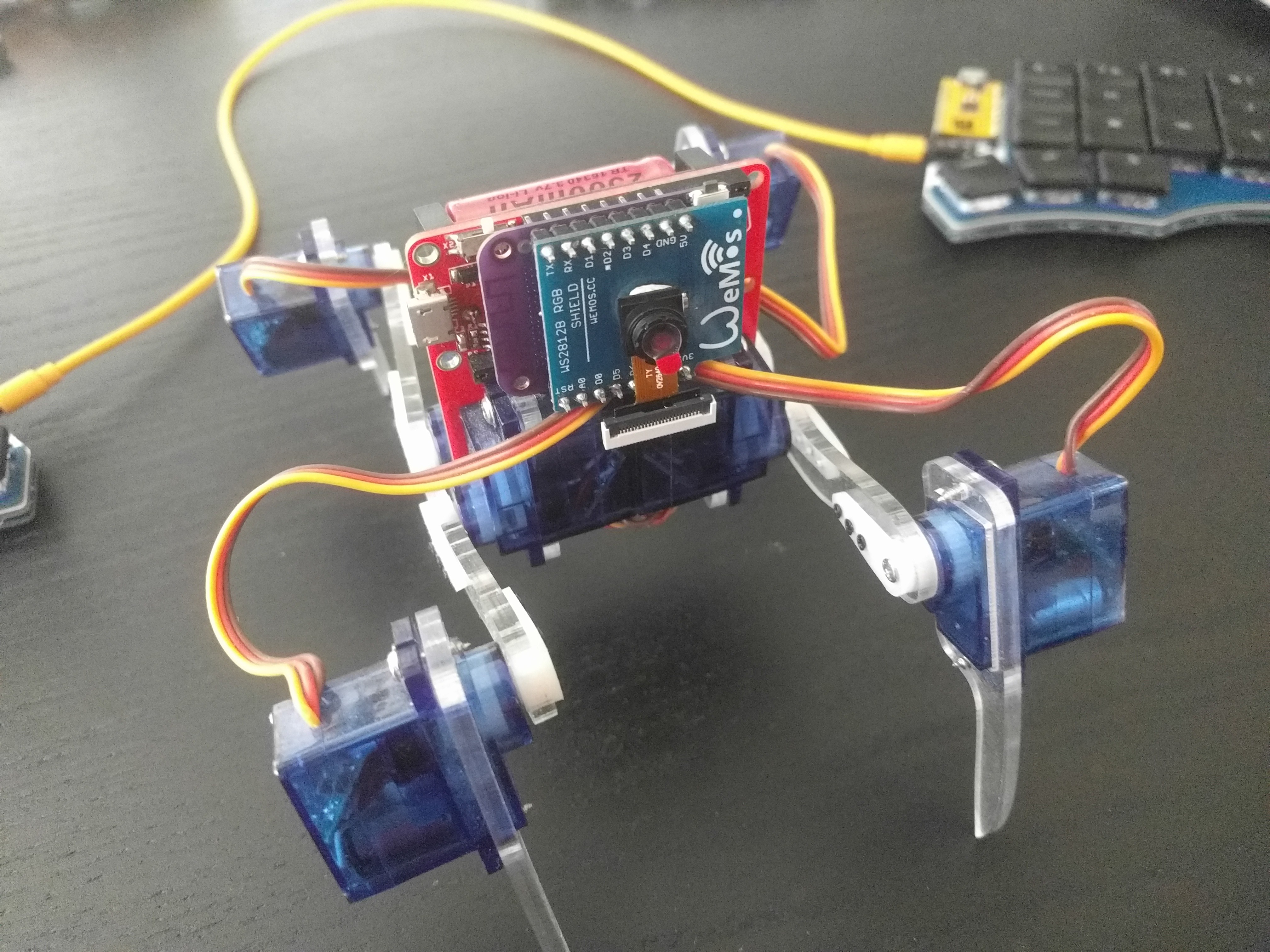
Since both the robot and the shield are waiting for the PCBs, I used the previous version of the robot and some random shield I had lying around, but you get the idea.
Ideally, if I have a lot of time, and can understand enough of the code, I might be able to port the Apriltags code from OpenMV and use it with the robot — that would be an awesome thing to do, but I doubt if my skills are sufficient.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.