 Apollo Timbers
Apollo TimbersI have been working on getting the 3 base drive units up and working. More on that soon. Though, I would like to post a bit of a progress update.
What has been done-
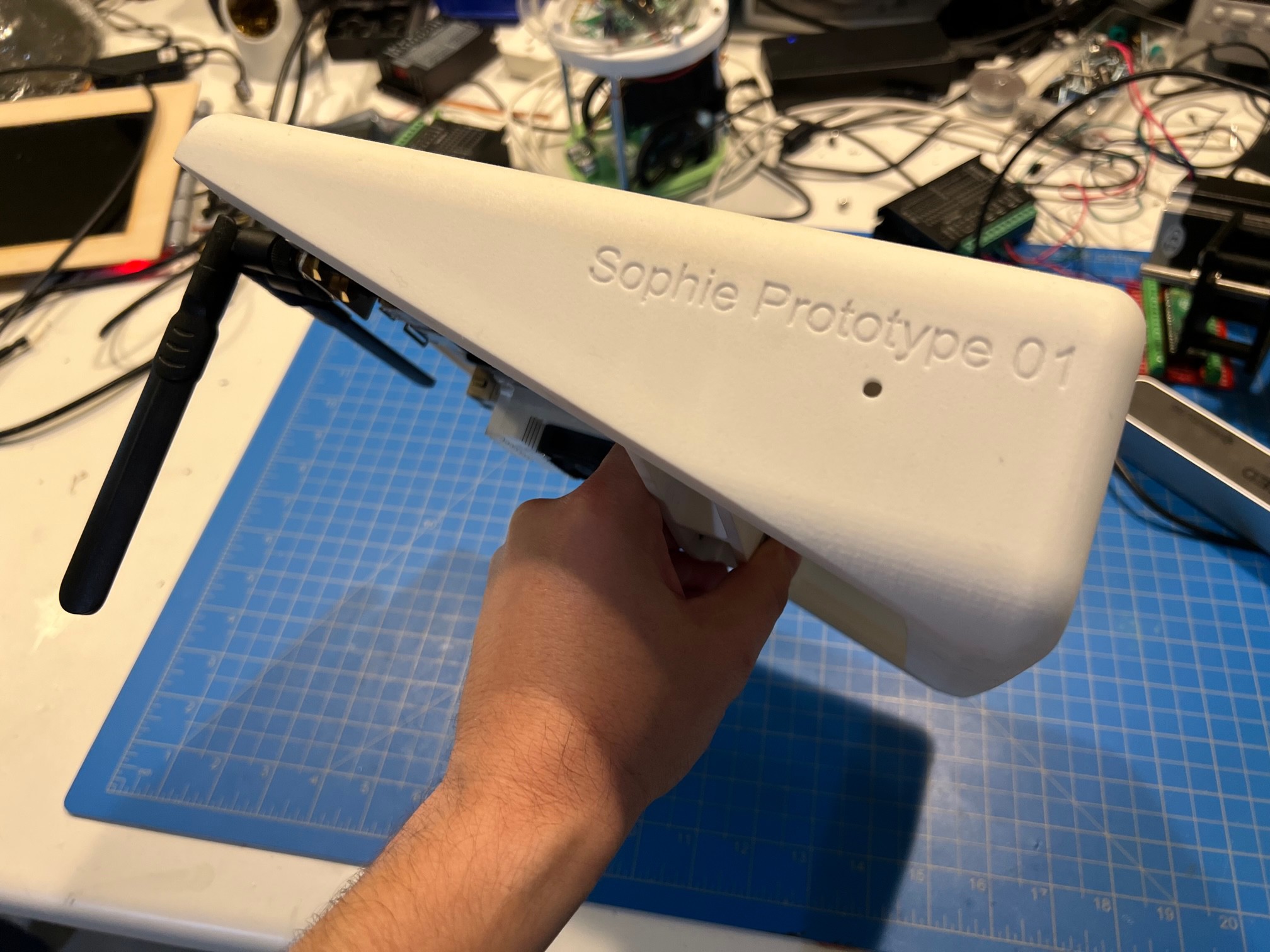
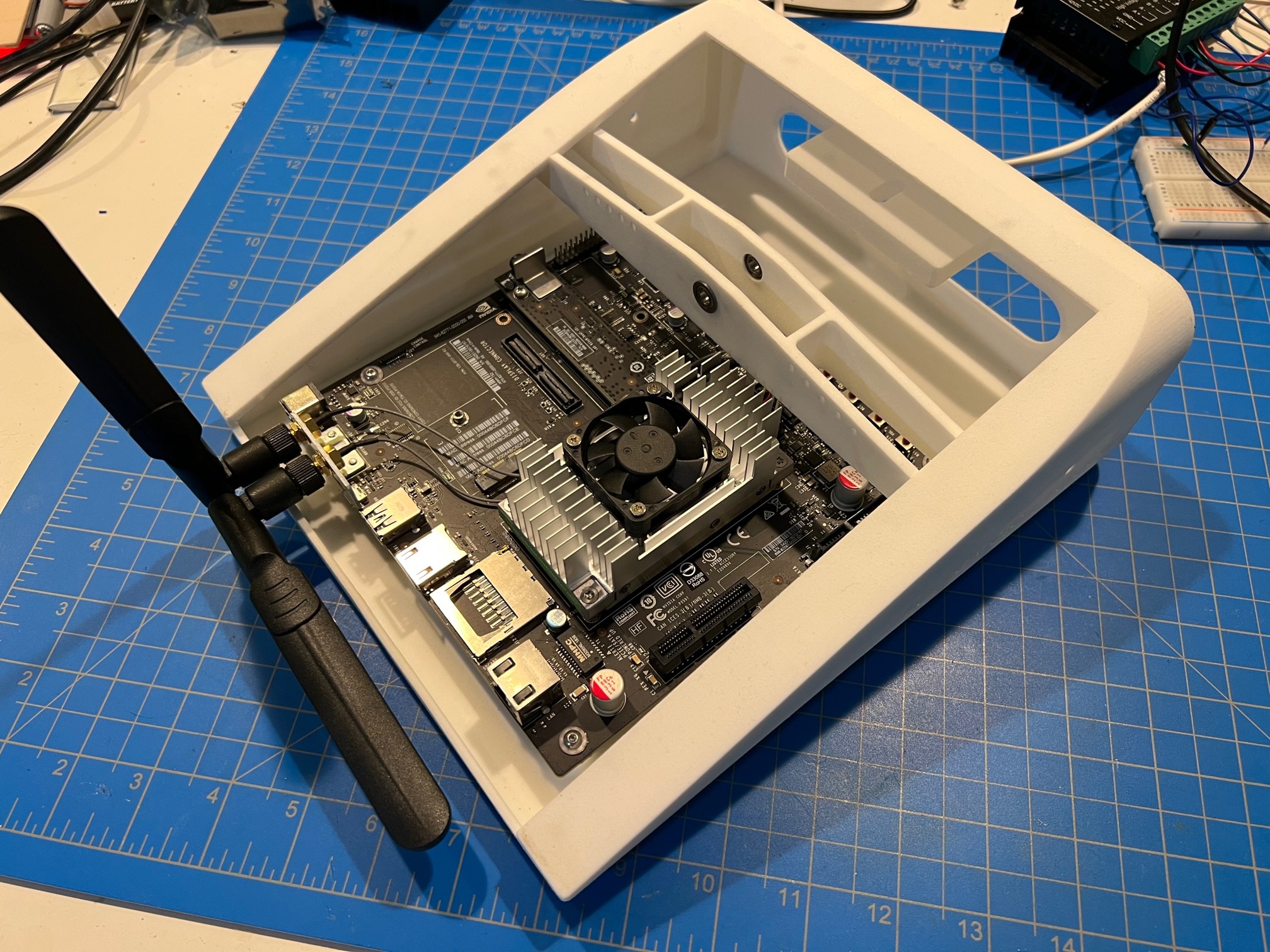
- The 3D printed head is back from the 3rd party printer service
- I mounted the Jetson (Main computer) into the head (I placed in metal helicoil's to mount with metal machine screws)
- Went to a local hacker space and got the wheel hubs milled down a on a lathe. This just removed weight and allowed them to move in closer to the drive unit. I think they had the version/size I needed so it was accounting for a purchasing mistake and or them being out of stock.
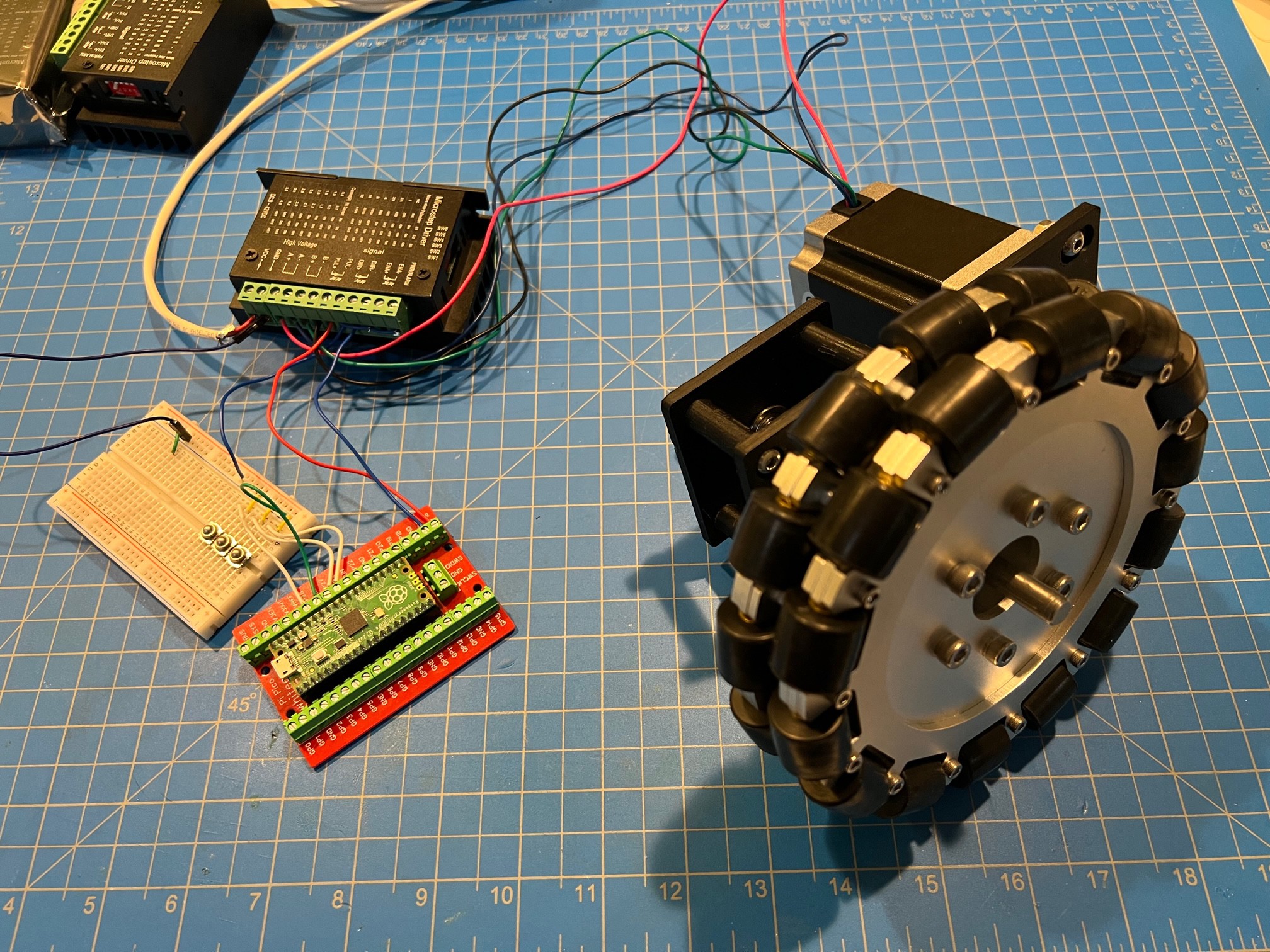
- Finished 1 drive unit prototype with 2 other on the way (The parts, once verified will be made out of metal)
- Ordered and received a medical grade vacuum pump for the soft actuators (neck actuators), Will need to do more to build out the soft actuator control circuitry.
- Got the ZED stereo vision system working with the Jetson and created a fresh calibration file for it.
Overall the project is now in full swing, I'm currently racing to finish out the prototype base that will contain three drive units, batteries and stepper controllers. (a rolling chassis so to speak) The 6 axis arm is still being produced though I hope to have it in hand soon. Need to purchase a DC-DC converter for it so that I supply the both clean and the correct voltage/amperage to it.
Finishing the base will allow me to start programming the low level controller to handle all three drive units and start having a better plan for mounting certain components. I'm currently looking for a good source of lithium iron phosphate batteries (LiFePO 4 battery) as I have used them in my robots, in the past and they have held up very well. (plus less risk of fire, bonus!)
Here are some in progress build photos of different "modules" coming together.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.