 Apollo Timbers
Apollo TimbersThe head got a bit of a dress up to better match the original CAD design. Added the blue sides and then applied a clear coat to them.
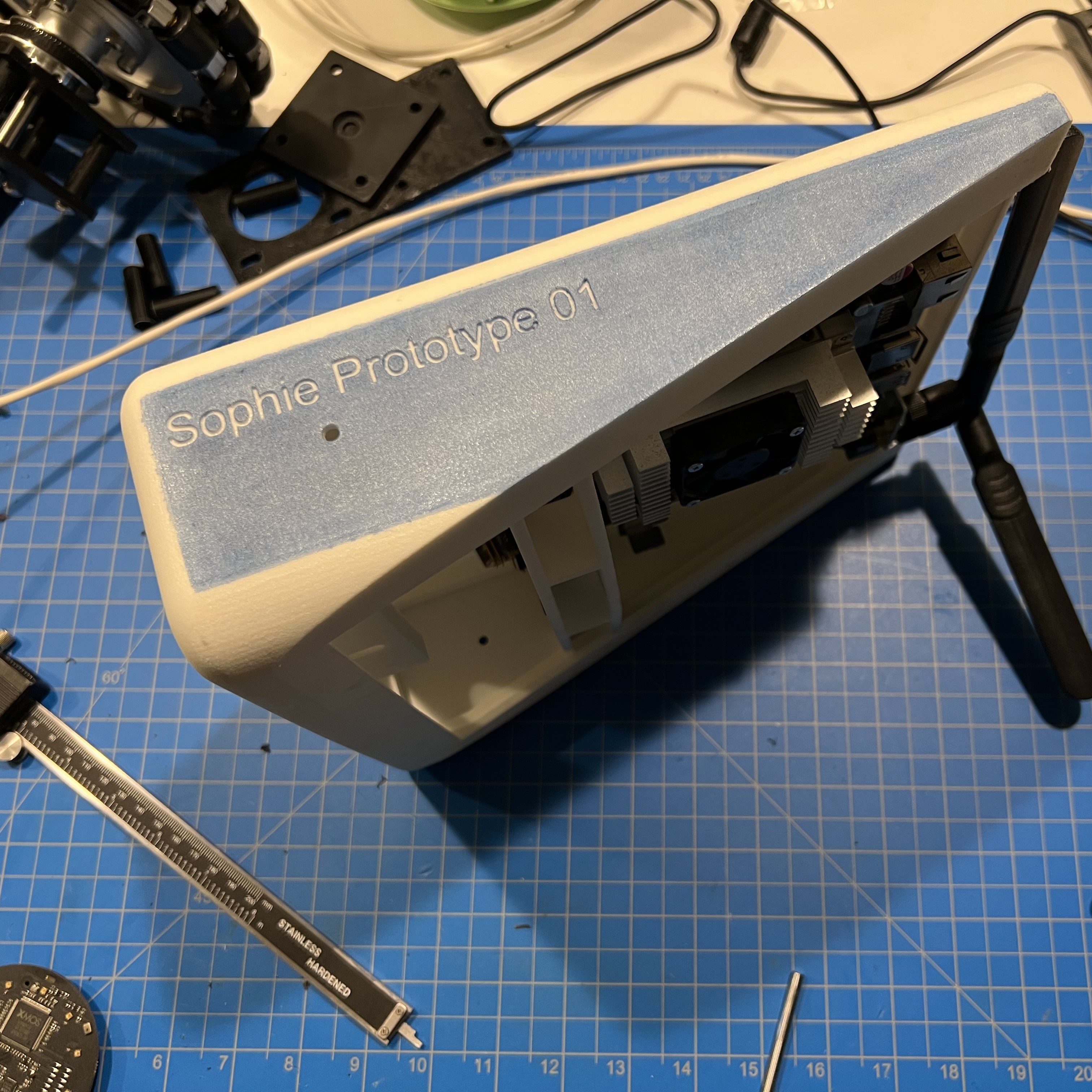
The head will contain quite a lot
Currently the ZED has a stereo camera. When I update to the ZED2 (very cool camera/sensor package) I should then have the following sensors. This should already help with a bunch of to do items like a IMU needed for localization and allow for a indoor environment sensing using the barometer/temp sensors.
Built into the ZED 2 -
- IMU
- barometer
- magnetometer
- temperature sensors
Additional sensors -
- Respeaker Mic Array v2.0 - Far-field (4 mics)
- Knock sensor
- Mini encoder (will connect direct to neck shaft, and will provide positional feedback for the soft actuators that power the head tilt)
Long ago I bought a Seed Studio ReSpeaker microphone array that should be able to be intergraded and give the robot the ability to sense and hear far field voices and the originating direction. I played with it on the pi a bit and was pretty easy to get initially set up. This should help the robot be more attentive to the environment and allow the ability for voice control. It could also turn to the direction of sounds initially to better respond or see/record something that happens.
I had another thought for a rather fun sensor where a cheap knock sensor (SW-2802 vibration switching element) could be mounted to the head and you could "wake up the robot" by knocking on its head. Not sure what It would do when you wake it up, but you could initially just have it say a random phase from a programmed list. (Hello, Did you need something, I'm awake, I see you...) Start giving it a basic personality.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.