 Apollo Timbers
Apollo TimbersI have been pretty busy with the project still, though it has mostly now swapped to power system design and for a little extra fun I made a nicer gripper design. (It also so happens to fit around a standard aluminum can) :) It will need some tweaking when the arm gets here, though I did discover a nice PA12 nylon infused with Glass Beads on Shapeways. Fusion 360 (*amazing program*) is stating the two fingers and silicon inserts should weigh around 15grams. The CAD may be lying a bit though, I did set the materials of the gripper, and they are hollow...
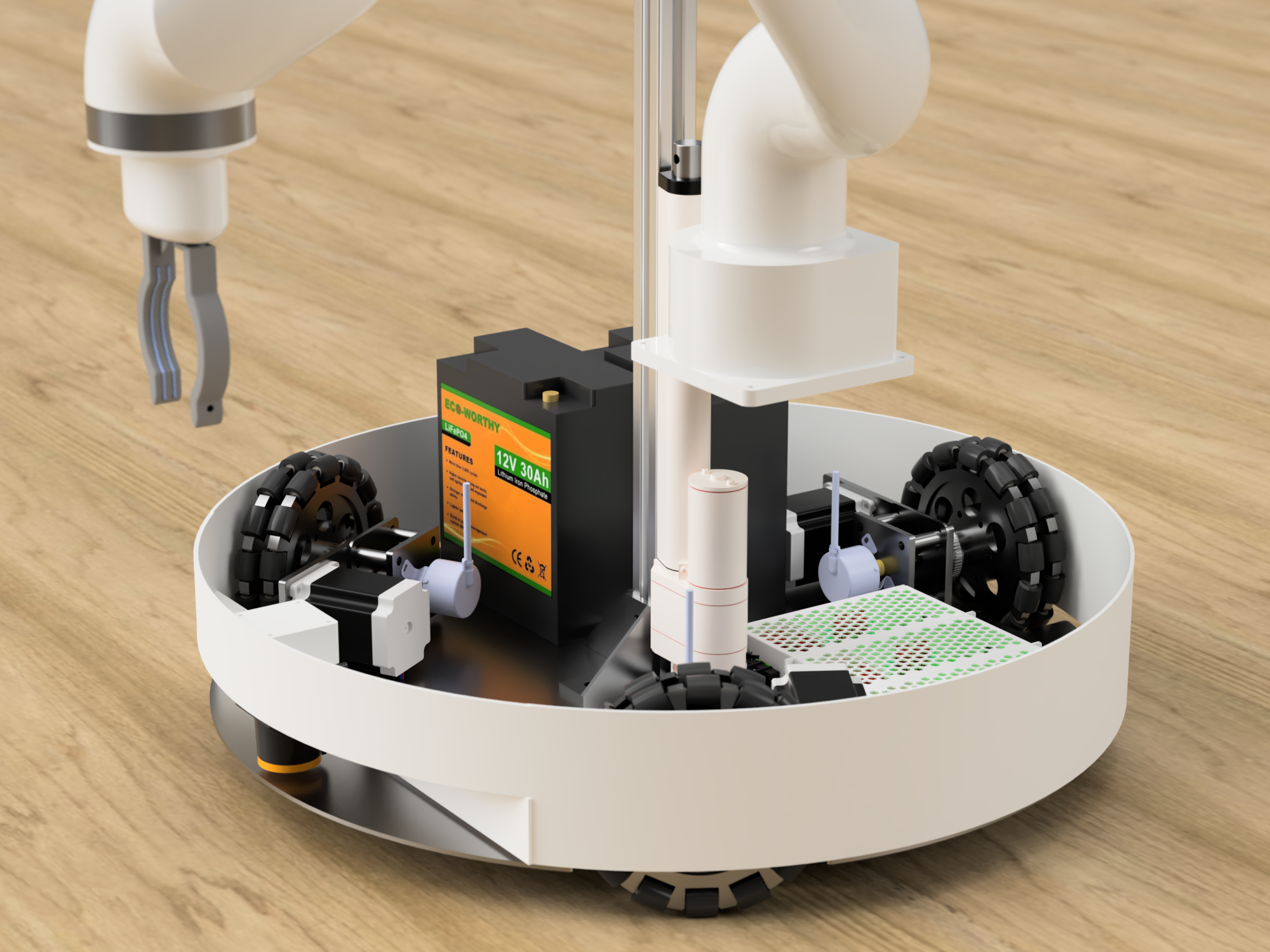
I'm also starting to really flesh out the base design and where everything will be going, I will soon be designing a sheet metal power panel to hold switches, circuit breakers and main battery cutoff.
Power requirements are being laid out, I'm sorting with primary and secondary loads. I will likely spec over on the DC-DC converters for inrush current and longevity. Took some internet searching, though I have found some nice (railroad spec'd) power versions from Meanwell. Will likely be a dedicated DC-DC for the arm, computer , and drive units.
Primary loads:
- Nvidia Jetson TX2 12volt DC-DC @ 7.5A Center positive
- 6 axis arm 24v @ ~3 amps
- Motor drives 24v @ ~1.5 amps
- Liner actuator 12v @ No load 1 amps, Load up to 5 amps
- Medical grade air pump 24v @ ~unknown (for neck tilt soft air muscles, and possibly a gripper down the road)
Secondary loads:
- Powered USB 3.0 hub 24v @ ~2amps
- Pi Pico 5v (powered by hub)
- Lidar (powered by hub)
- Indicator LED's (meh)
- Solid state relays for "low power mode" (meh)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.