 Johanna Shi
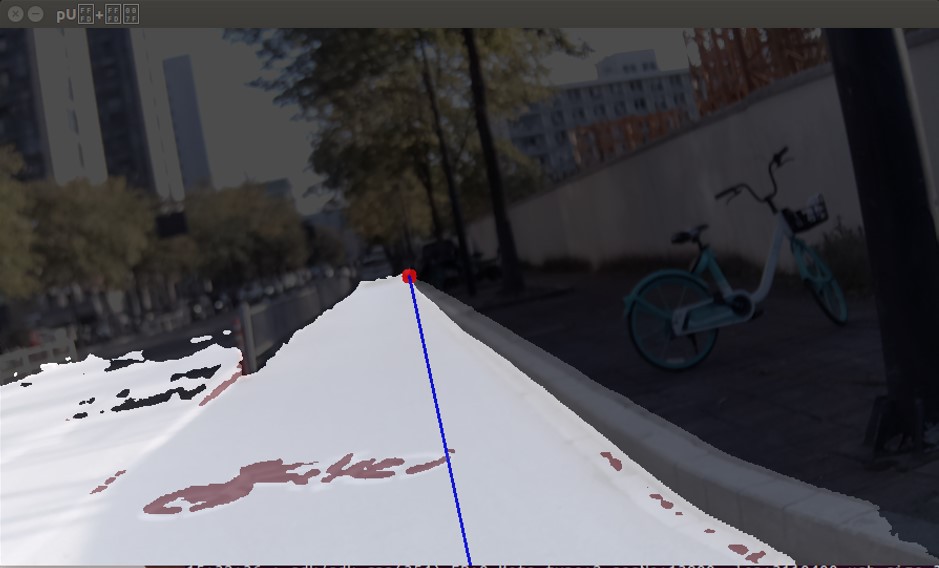
Johanna ShiBelow we will show how to develop a road segmentation demo using OpenNCC and its open-source SDK. The deployed road segmentation was originally downloaded from Intel OpenVINO's pre-trained model. For better performance, you can replace the model with your own-trained one, but the developing steps are the same.
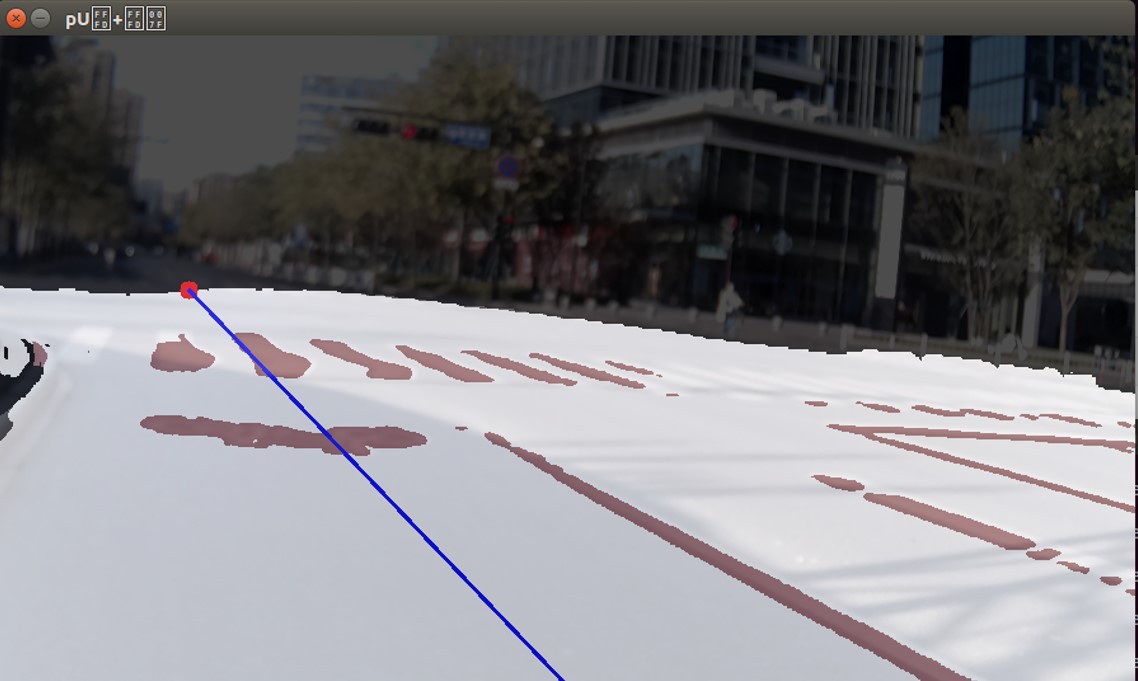
In addition to the analytical implementation of the segmentation model, it also judges the road direction through corner recognition and points distance analysis.
Configure the PC
The following commands are operated on the PC. Currently, we support Ubuntu versions greater than 16.04.
- Install libusb and ffmpeg
$ sudo apt-get update
$ sudo apt-get install libgl1-mesa-dev -y
$ sudo apt-get install unixodbc -y
$ sudo apt-get install libpq-dev -y
$ sudo apt-get install ffmpeg -y
$ sudo apt-get install libusb-dev -y
$ sudo apt-get install libusb-1.0.0-dev -y
- Clone openncc repo
$ git clone https://gitee.com/eyecloud/openncc.git
- Build environment(ubuntu)
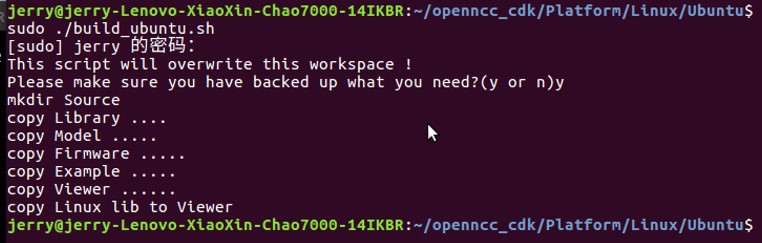
$ cd openncc/Platform/Linux/Ubuntu
$ ./build_ubuntu.sh
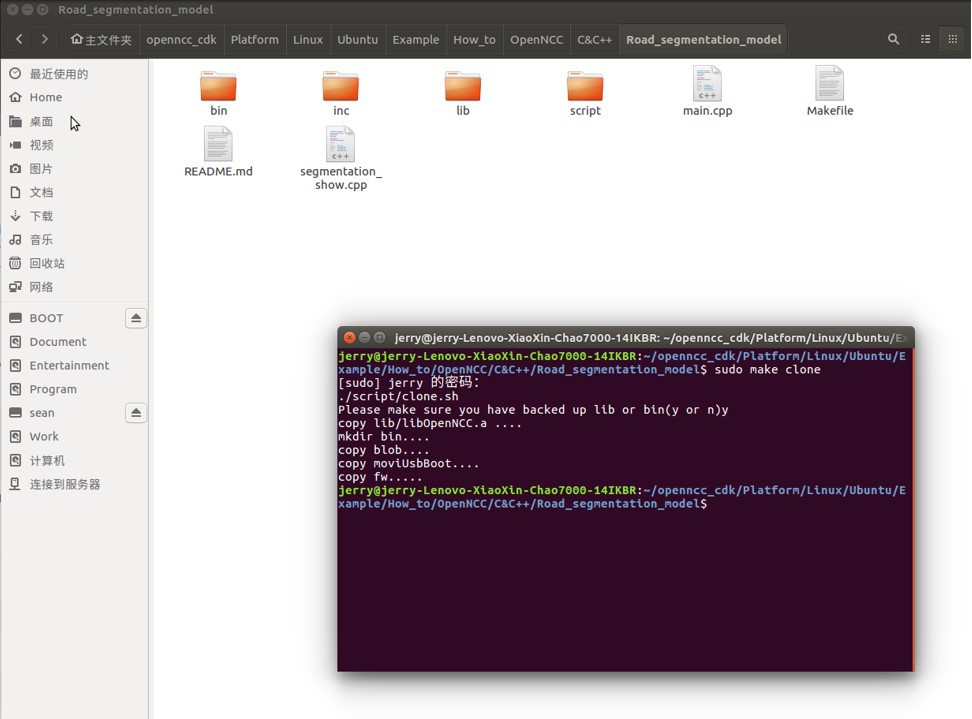
$ cd Example/How_to/OpenNCC/C&C++/Road_segmentation_model
$ sudo make clone
- Compiler and run
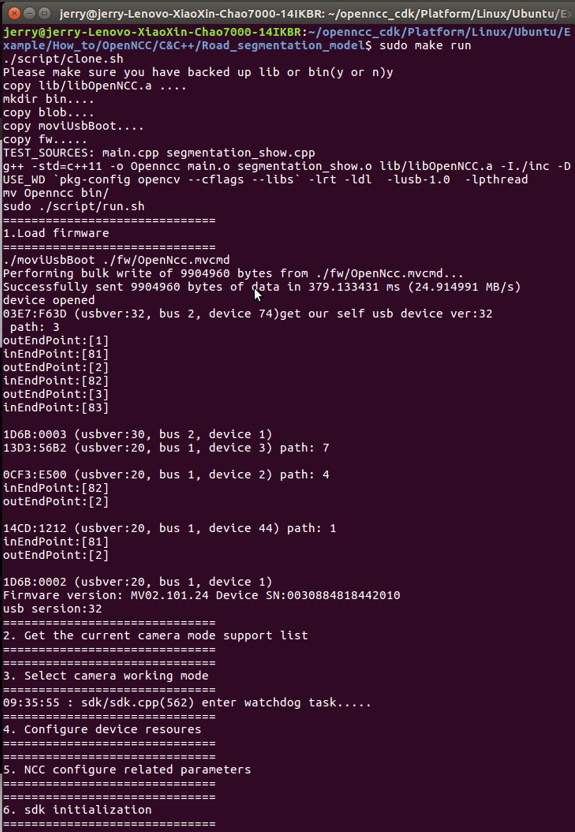
$ sudo make all
$ sudo make run
Running effect

 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠
 Stefan
Stefan
 Wajid Ahmad
Wajid Ahmad