 Fabien-Chouteau
Fabien-ChouteauMounting options
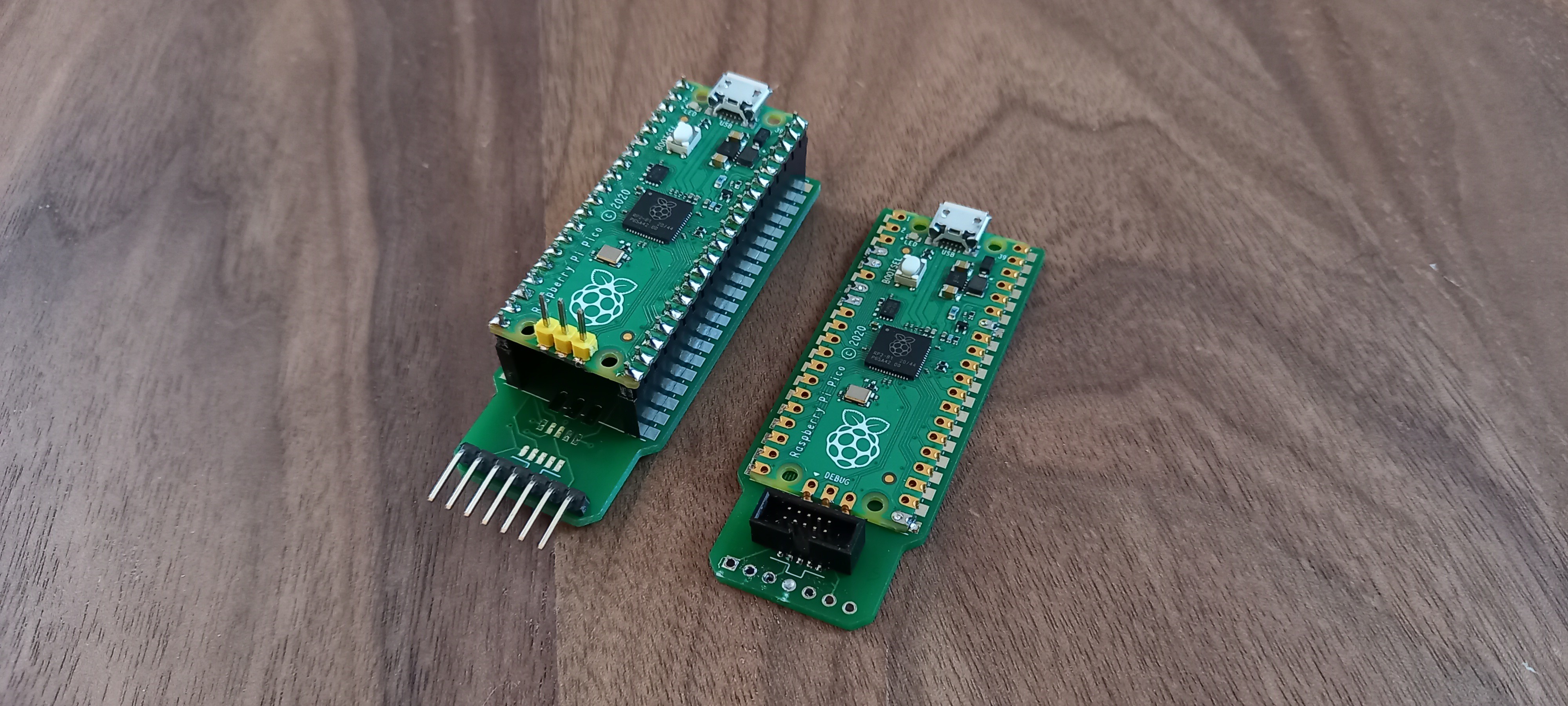
There are two ways to mount a Raspberry Pi Pico on the Picoprobe-PCB. You can either solder it directly for a slim/compact result (right), or use header to be able to re-use the Pico on other projects (left).
Install the Picoprobe software
- Either get the picoprobe `.uf2` binary from our release here or compile it yourself from sources here.
- Hold the BOOTSEL button on the Pico, then connect to your computer using a micro USB cable.
- Drag and drop the UF2 file on to the RPI-RP2 drive.
- You should be good to go.
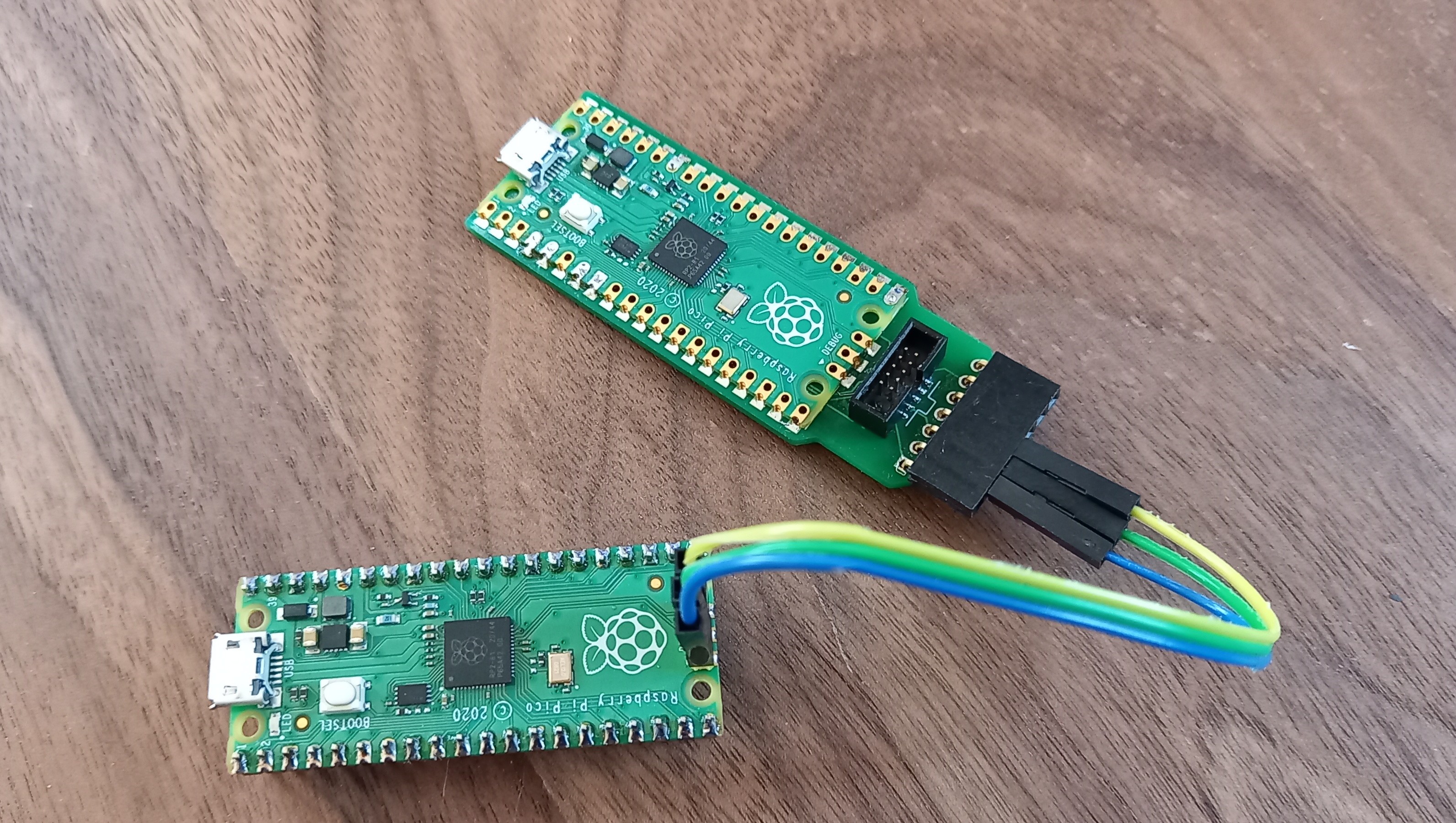
Plug the picoprobe SWD pin to the Pico that you want to debug
Build Raspberry Pi's openocd
$ sudo apt install automake autoconf build-essential texinfo libtool libftdi-dev libusb-1.0-0-dev $ git clone https://github.com/raspberrypi/openocd.git --branch picoprobe --depth=1 --no-single-branch $ cd openocd $ ./bootstrap $ ./configure --enable-picoprobe $ make -j4
Run openocd
$ ./src/openocd -s tcl -f interface/picoprobe.cfg -f target/rp2040.cfg
Open On-Chip Debugger 0.10.0+dev-g18b4c35-dirty (2021-10-16-16:51)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Info : only one transport option; autoselect 'swd'
Warn : Transport "swd" was already selected
adapter speed: 5000 kHz
Info : Hardware thread awareness created
Info : Hardware thread awareness created
Info : RP2040 Flash Bank Command
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : clock speed 5000 kHz
Info : SWD DPIDR 0x0bc12477
Info : SWD DLPIDR 0x00000001
Info : SWD DPIDR 0x0bc12477
Info : SWD DLPIDR 0x10000001
Info : rp2040.core0: hardware has 4 breakpoints, 2 watchpoints
Info : rp2040.core1: hardware has 4 breakpoints, 2 watchpoints
Info : starting gdb server for rp2040.core0 on 3333
Info : Listening on port 3333 for gdb connections
Info : accepting 'gdb' connection on tcp/3333
Warn : target was in unknown state when halt was requested
target halted due to debug-request, current mode: Thread xPSR: 0x21000000 pc: 0x10008f64 msp: 0x20041fc0
Info : RP2040 B0 Flash Probe: 2097152 bytes @10000000, in 512 sectors
[...]
Debug!
Now that openocd is connected, you can start debugging with GDB for instance.
$ arm-eabi-none-gdb (gdb) target extended-remote :3333
 Yann Guidon / YGDES
Yann Guidon / YGDES
 Nick
Nick
 Nikola
Nikola
 Hpsaturn
Hpsaturn