 Daphne
DaphneAmeba is a low-power dual-band WLAN and Bluetooth Low Energy SoC by Realtek. The AMB23 (RTL8722DM_MINI) also include memory for Wi-Fi protocol functions and application making it simple for anyone to develop various kind of IoT applications. At the same time it has a wide range of peripheral interfaces. With all these interfaces, it can connect to most of the electronics components like LEDs, temperature and humidity sensors, and so on.
More Resources:
If you need additional technical documents or the source code for this project. Please visit the official websites and join the Facebook group and forum.
Ameba Official Website: https://www.amebaiot.com/en/
Ameba Facebook Group: https://www.facebook.com/groups/amebaioten
Ameba Forum: https://forum.amebaiot.com/
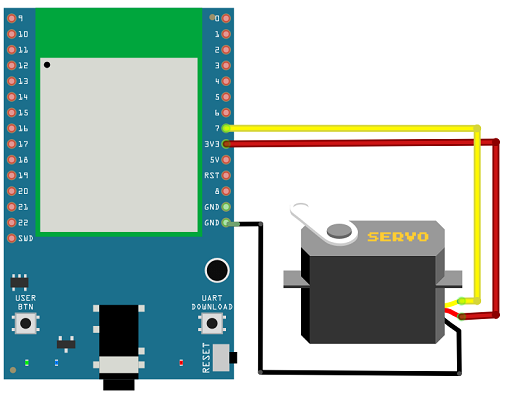 Open the example, “File” -> “Examples” -> “AmebaAnalog” -> “ServoSweep”
Open the example, “File” -> “Examples” -> “AmebaAnalog” -> “ServoSweep”
 patchartrand
patchartrand

 ProgressTH
ProgressTH