 doctek
doctekWarning: This is not an introductory tutorial for beginners! I'm assuming you already know what steppers are, have decided they are right for your project, and want to know how to use them better. I assume you are familiar with the Arduino environment and know how to load libraries, how to program, compile, and upload. You should also have some basic knowledge of Electronics including basic circuit skills and understanding and be familiar with breadboarding. If you lack these skills, take time to learn them, then come back. This isn't difficult, but beginners will be frustrated without an adequate background.
Introduction
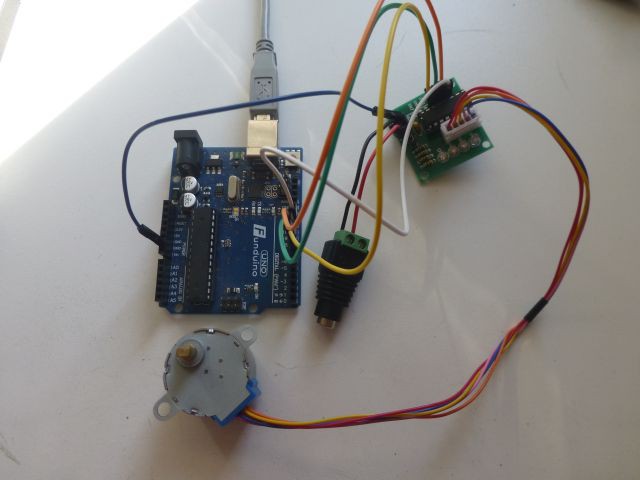
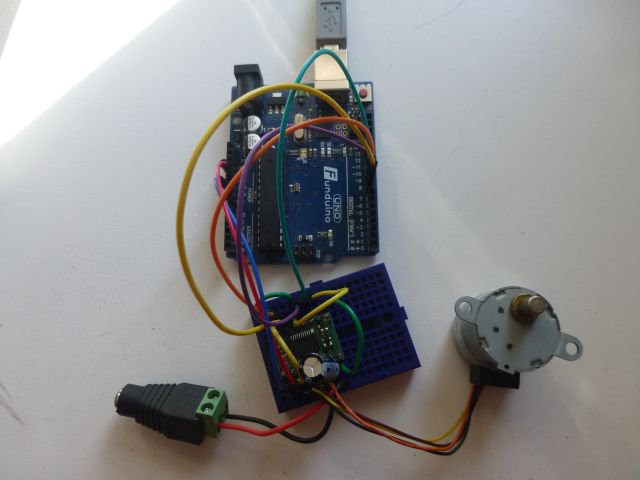
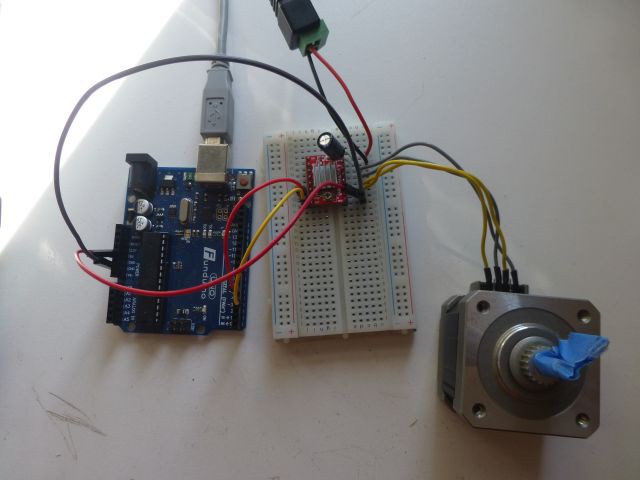
There are various types and sizes of stepper motors, and lots of details to understand. A selection of important examples will be examined and discussed in Step 1. For those wanting more details, here are a few of the most useful links I have found.
http://homepage.divms.uiowa.edu/~jones/step/ Classic, academic reference. Lots of good info! Most links are broken, unfortunately.
https://dronebotworkshop.com/stepper-motors-with-arduino/ Good brief intro with example code, ignore the AccelStepper examples - I'll provide those!
https://learn.adafruit.com/all-about-stepper-motors/what-is-a-stepper-motor Good source of hardware if you need it.
https://hackaday.io/project/183279-accelstepper-the-missing-manual The "Missing Manual" can be found here. You don't need to read it all right now, just keep it handy as we go on.
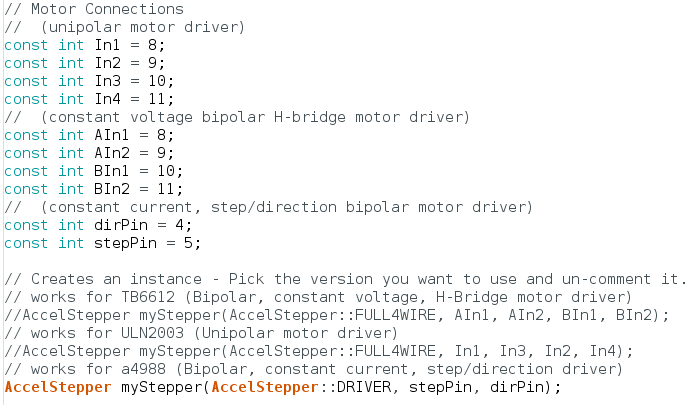
To get started, you should add the AccelStepper library to Arduino using the library manager. Pick the library by Patrick Wasp. The Manual is based on Version 1.61, but if there's a later version, you can probably use it.
We will use the elapsedMillis library as well, so load it also if you don't have it.
All the tutorial examples are presented in the Build Instructions below. There are seven of them, be sure to read them all!
I have a few more advanced tutorials that I'll post soon. Questions and comments are most welcome.






 Mark VandeWettering
Mark VandeWettering
 Alexander Stepanov
Alexander Stepanov
 HYuiii
HYuiii
 shlonkin
shlonkin