 Radu Pascal
Radu PascalAfter making a few tweaks to the firmware, this morning, I managed to get 70% success rate at homing. And even the 30% was only 1 full step (stepper) error. That translated in spot on 70%, and about ~7KHz off tuning for the rest 30%. (after 20 iterations)
Now I'm convinced that I have a homing issue that I need to investigate further. I'm pretty certain that's an artefact of how steppers work. The error is always 1 full step, and I managed to deduce that by confirming that my RigExpert AA-55 was reporting either lowest SWR on 7.000 or ~6.993KHz. That 7KHz difference is exactly 16 micro steps, or 1 full step in my current setup. I am guessing that the motor lands either on the right side or left side of the step after homing, as there is some flexibility in the mount.
Can that be fixed? I'm not sure at the moment. The 3d printers don't have that problem as they don't care finding the absolute repeatable 0 (well.. except in some conditions), they just need a common reference for a printing session.
Another source of error is the play in the variable capacitor. I did manage to measure it as being a fixed (at least for 7MHz band). If I move CW and then back to the same position CCW, there is a 4KHz offset. This can be calibrated an compensated in the firmware (in some future iteration).
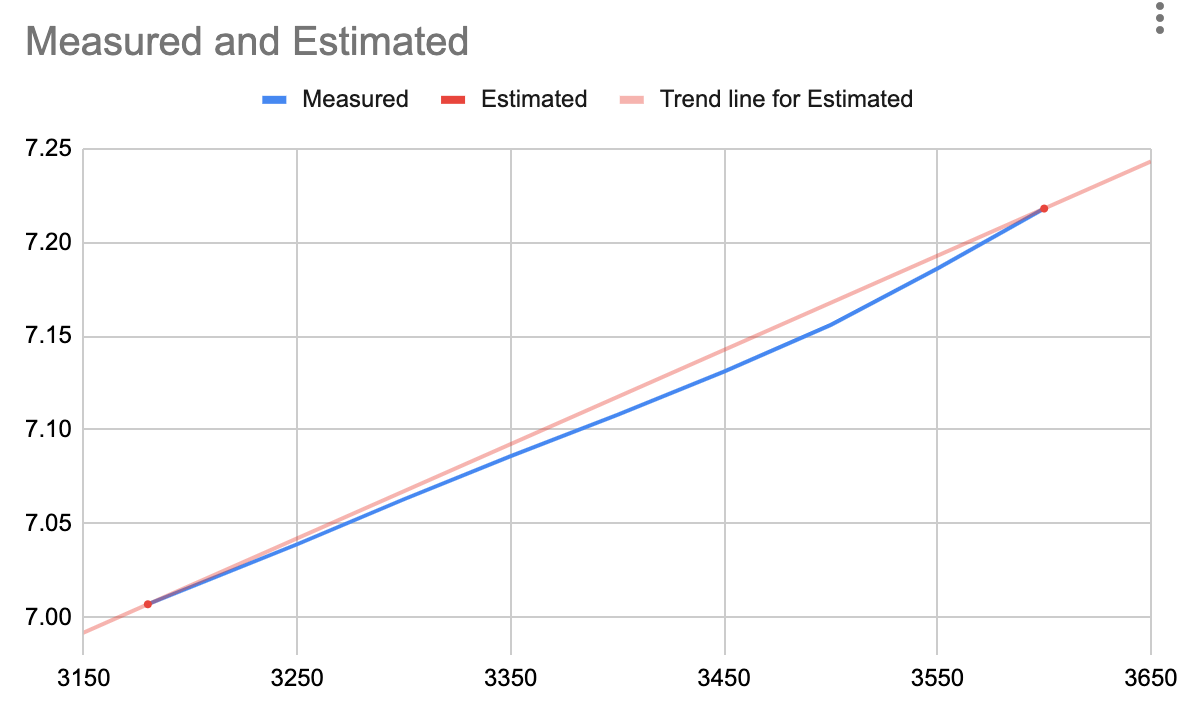
Finally, about the linear estimation. Here is a graphic of estimated position, vs best measured position in steps of 50. I need to repeat in smaller steps and wider band, to get enough steps to figure out what function to apply to get better position estimation.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.