Radu Pascal
Radu Pascal-
It's not dead
01/15/2023 at 05:56 • 0 commentsThis is a very short log. I got a question on github related the code and I realized I MUST finish this project.
It's not dead! I just took a really long break. I will allocate a few weekends in Feb-March to finish it, so stay tuned :)
-
Coding..
02/19/2022 at 16:35 • 0 commentsDecided to post an update on the project. It's still alive. It's still in progress.
So I decided to park "homing" problems until I have an overall functional setup. But, I am trying to figure out the code. I really wanna take that setup for a SOTA.
If anyone wants to have a look of the code in progress, the github repo is here: https://github.com/haiduc32/MagLoopTuner
The overall principle of operation:
- if you start the board with "the button" pressed, it goes into calibration.
- the stepper will go from 0 to 3 rotations, in 50 micro steps increments
- whenever you short press, it moves
- you have to have a meter connected to the antenna, and the tuner to the radio. if the antenna is calibrated for a frequency of interest, you enter the frequency with lowest SWR on the radio, and 1sec press the button, to save that as datapoint, the stepper moves to next position
- if you're done with calibration values for the band, long press (2sec) to save the calibration values to EEPROM, stepper will reset to 0, and you can calibrate for another band
- if you're done, press reset button
- if not in calibration mode, it will read calibration data points, and try to find data points for the given frequency
more or less... work in progress.
-
Sunday thoughts
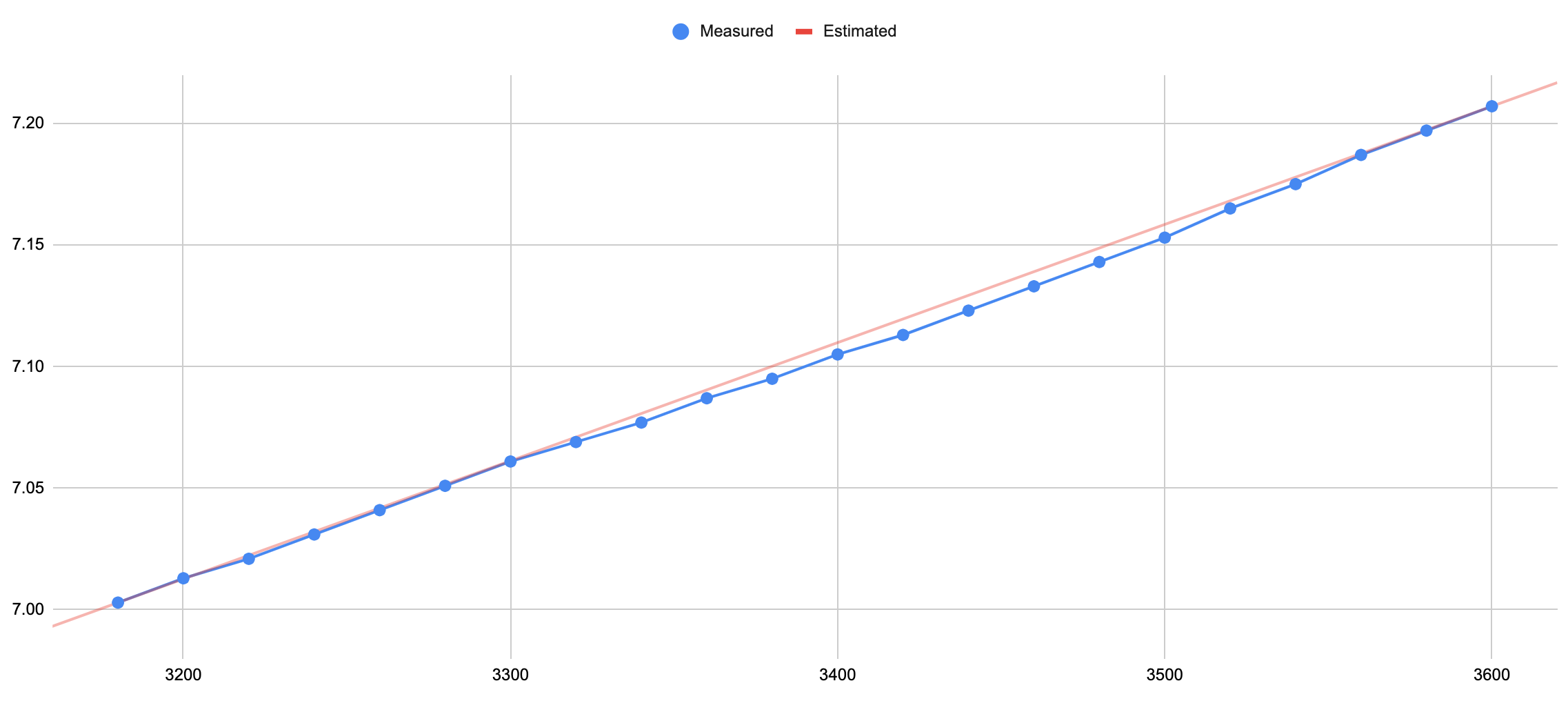
02/13/2022 at 08:22 • 0 commentsI gathered more data points, and there is something I can't explain on 7MHz band on my MagLoop. Incrementing in fixed steps, does not provide a linear increase in the tuned frequency (as I mentioned in a number of places). But it doesn't behave like an exponential function as I initially thought. It's more as if it has a dip at a certain point(s):
![]()
From 6.770MHz to 7MHz, the increase is linear. I didn't bother to measure the upper side.
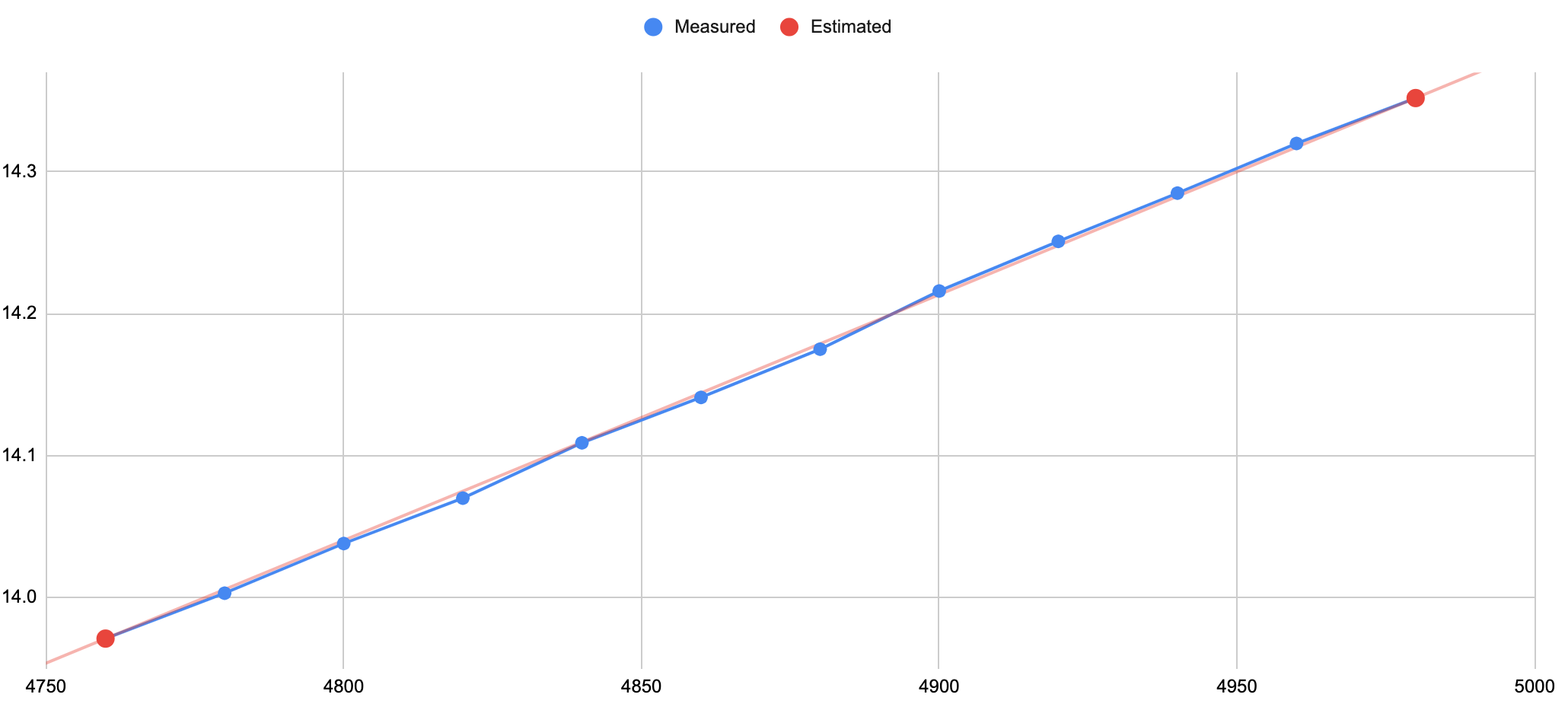
I gathered data points for 14MHz:
![]()
Surprise surprise, this one seems to have a linear response. Also it has a wider frequency change, for the same steps (compared to the 7MHz band). Note: my MagLoop requires plugging a capacitor for 7MHz band, and unplugging it for 14MHz.
Conclusions?
I don't see how I can find a function for that. Will keep linear estimation, but probably will store multiple data point as part of calibration. That should give a good enough result.
The measurements were done with RigExpert AA-55. It should be fairly accurate, at least I trust it 100 times more than the nanoVNA.
Also a sneak peak at the enclosure (it's not perfect, but it works, so I'll consider that final):
![]()
![]()
![]()
-
Almost usable
02/12/2022 at 09:22 • 0 commentsAfter making a few tweaks to the firmware, this morning, I managed to get 70% success rate at homing. And even the 30% was only 1 full step (stepper) error. That translated in spot on 70%, and about ~7KHz off tuning for the rest 30%. (after 20 iterations)
Now I'm convinced that I have a homing issue that I need to investigate further. I'm pretty certain that's an artefact of how steppers work. The error is always 1 full step, and I managed to deduce that by confirming that my RigExpert AA-55 was reporting either lowest SWR on 7.000 or ~6.993KHz. That 7KHz difference is exactly 16 micro steps, or 1 full step in my current setup. I am guessing that the motor lands either on the right side or left side of the step after homing, as there is some flexibility in the mount.
Can that be fixed? I'm not sure at the moment. The 3d printers don't have that problem as they don't care finding the absolute repeatable 0 (well.. except in some conditions), they just need a common reference for a printing session.
Another source of error is the play in the variable capacitor. I did manage to measure it as being a fixed (at least for 7MHz band). If I move CW and then back to the same position CCW, there is a 4KHz offset. This can be calibrated an compensated in the firmware (in some future iteration).
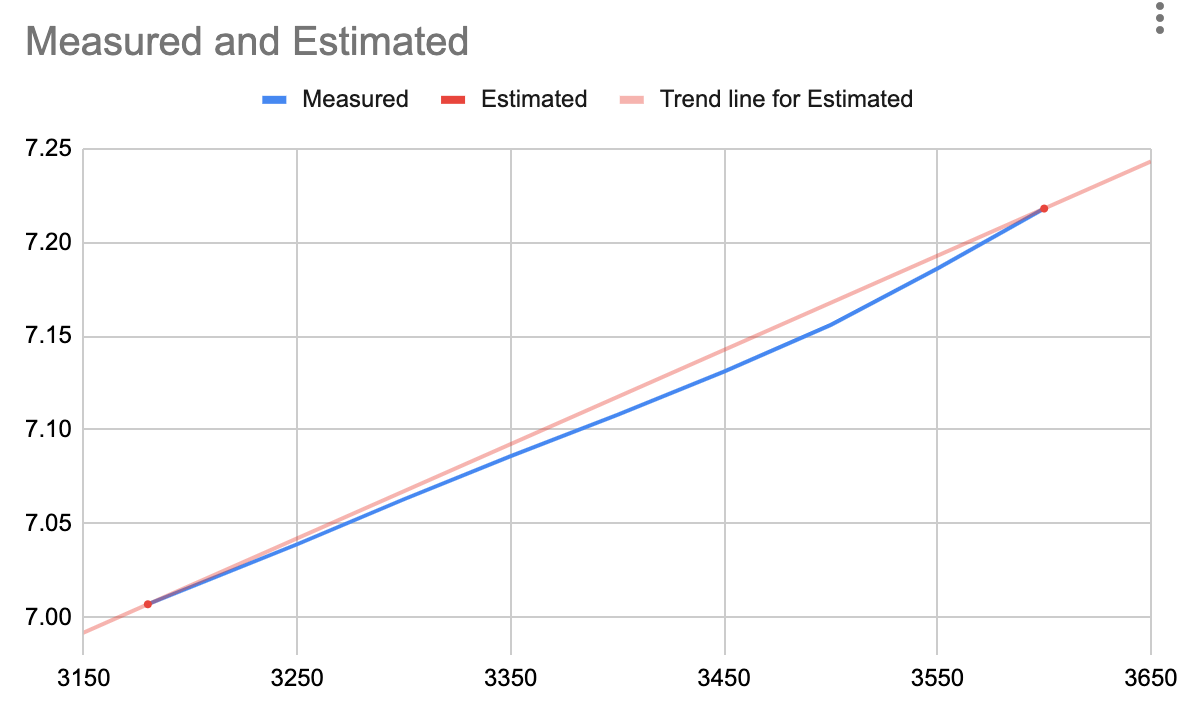
Finally, about the linear estimation. Here is a graphic of estimated position, vs best measured position in steps of 50. I need to repeat in smaller steps and wider band, to get enough steps to figure out what function to apply to get better position estimation.
![]()
-
Changing the approach
02/08/2022 at 10:25 • 0 commentsA few weeks ago I realised that there might be an easier way then to have a antenna analyzer circuit. What if the antenna, for a frequency, is always tuned in the same position of the variable capacitor?
Playing with my magloop yielded exactly that result. Even by changing slightly the geometry, it would still be tuned in the same position of the variable capacitor.
That simplifies the problem greatly. You can pre-record best stepper position for a few frequencies in a band, and then derive all intermediary positions.
PoC done, and now I'm making the build which I'll publish, with steps, when I'm done.