 kelvinA
kelvinANavigation
The title tag system is explained here, and the table is updated when a change occurs. Notable logs have bold L# text.
| L1 [A] Name Changes | L2 [T] Concept design and branding | L3 [T] Thoughts over the past few weeks |
| L4 [R] Omnidirectional Wheels and Project Goals | L5 [R] Telescopic actuator | L6 [R] New Omniwheel Found |


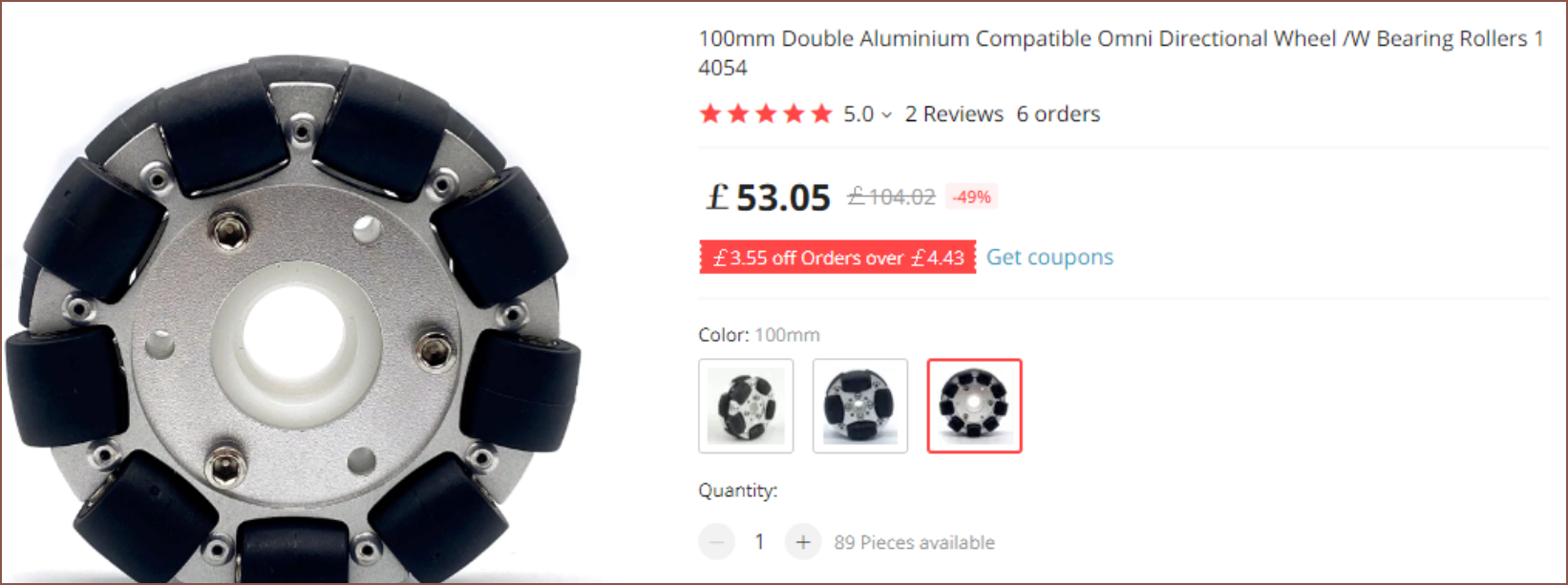 This wheel can take 30kg of force and weighs 360g or something, but it also costs more than any backpack I've ever bought. I knew this backpack was going to be much more expensive than whatever I could buy off Amazon/AliExpress, but...
This wheel can take 30kg of force and weighs 360g or something, but it also costs more than any backpack I've ever bought. I knew this backpack was going to be much more expensive than whatever I could buy off Amazon/AliExpress, but...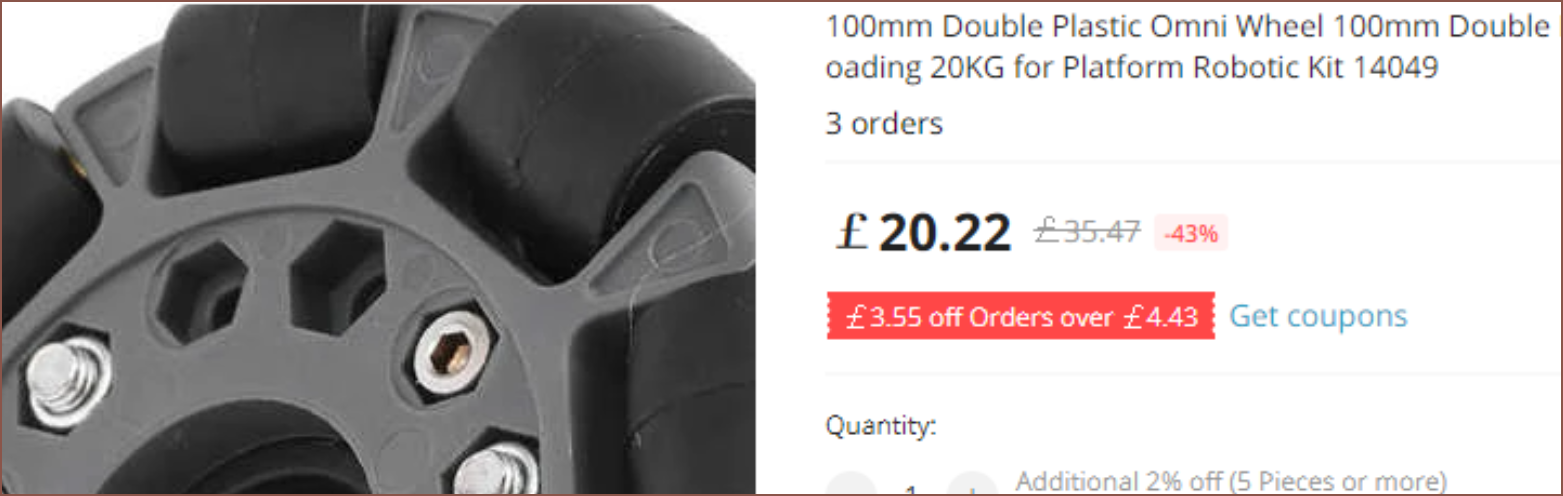 This one is 320g and can do 20kg, but I probably shouldn't try this wheel is when going at elevated speeds. Then again, I just remembered that some kick scooter wheels have plastic rims, so perhaps it's fine:
This one is 320g and can do 20kg, but I probably shouldn't try this wheel is when going at elevated speeds. Then again, I just remembered that some kick scooter wheels have plastic rims, so perhaps it's fine: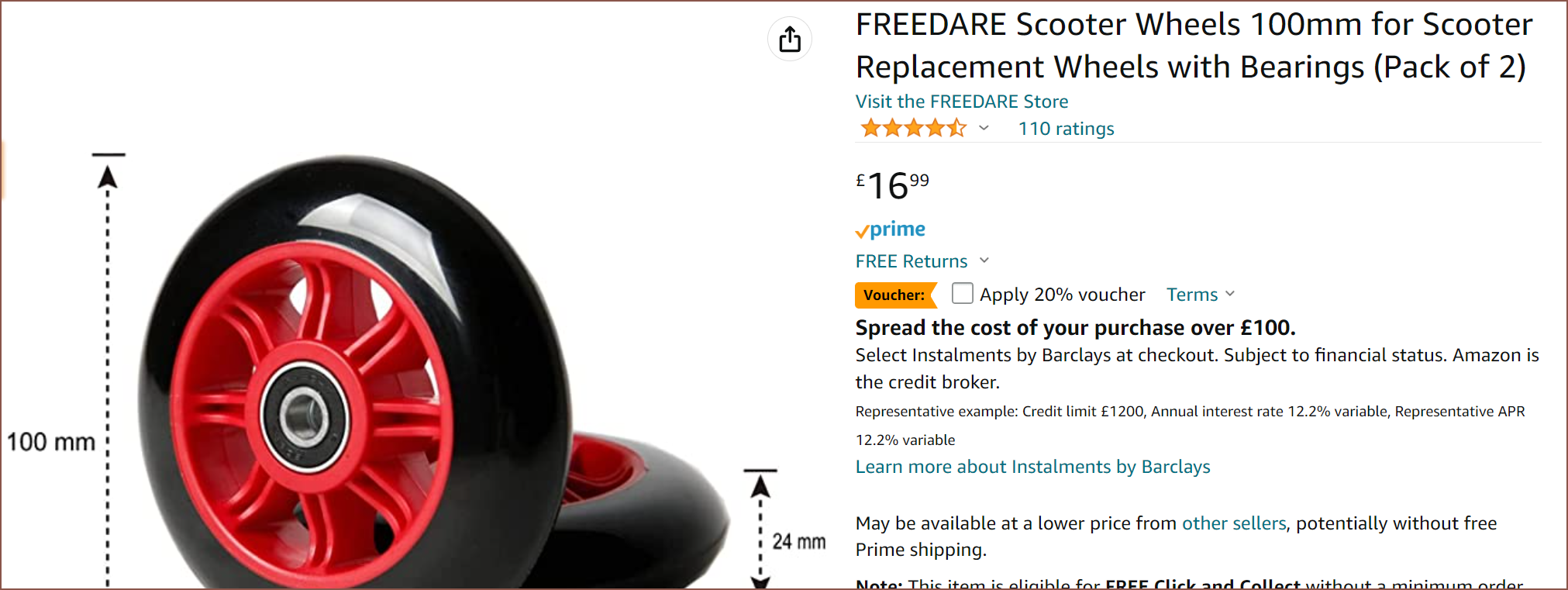
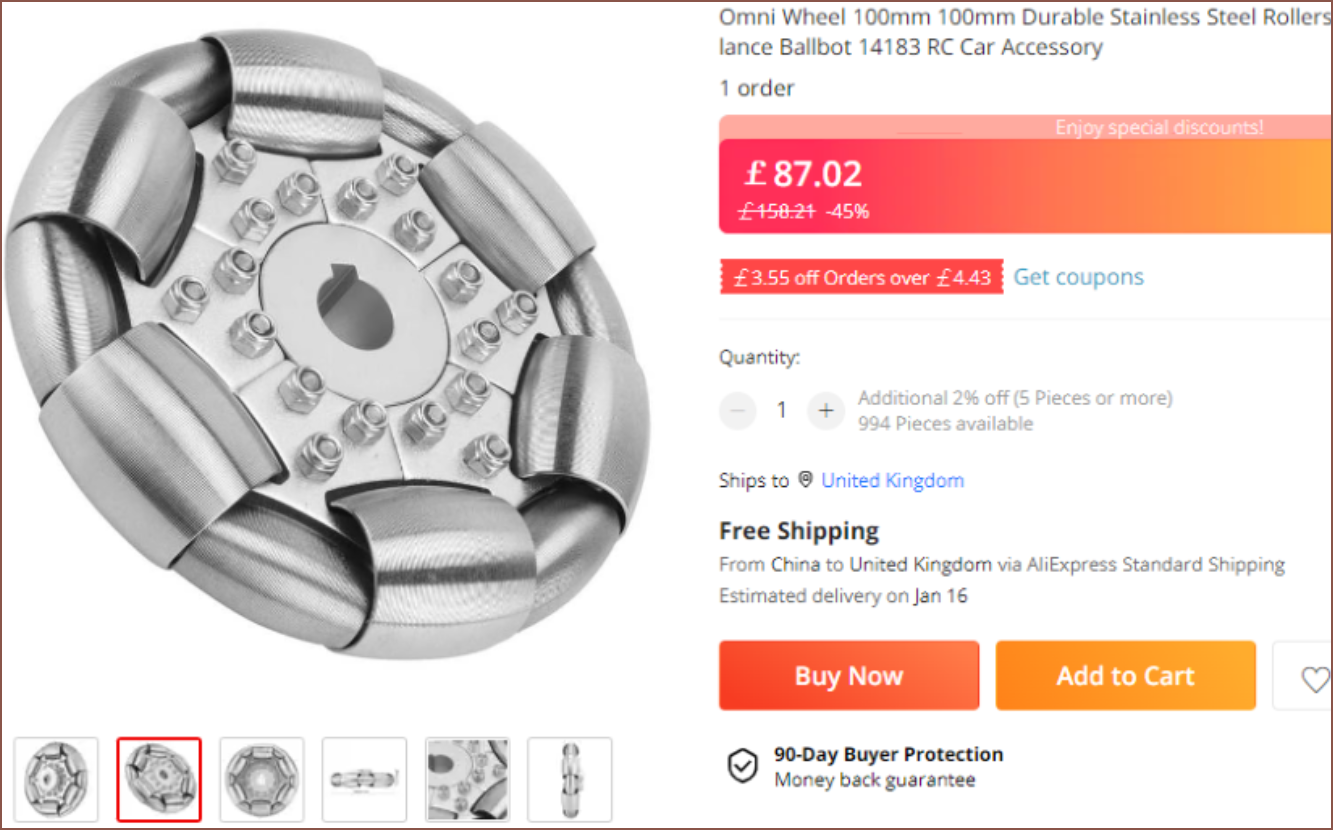 Now if I'm spending the big bucks, might as well go with the platinum skin. I've got no idea of the durability of this wheel or if said wheel would actually damage the ground, but metal wheels have less friction and this application calls for such low friction wheels. This wheel looks beautiful and I'm currently using this design for all mental conceptural imagery, but apparently it can only carry a measly 5kg. Why? It's also 539g (though most other listings state 250g). I once found
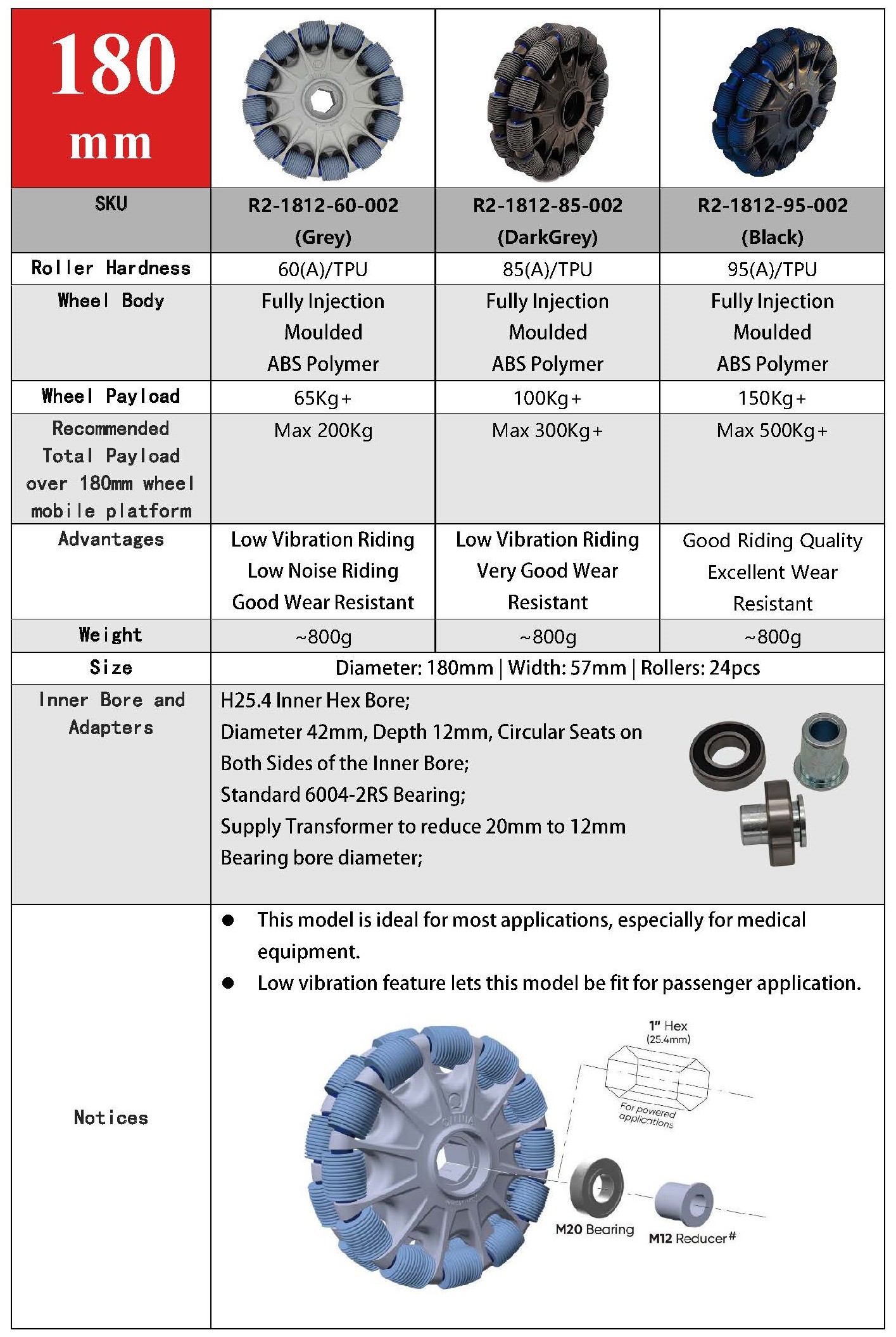
Now if I'm spending the big bucks, might as well go with the platinum skin. I've got no idea of the durability of this wheel or if said wheel would actually damage the ground, but metal wheels have less friction and this application calls for such low friction wheels. This wheel looks beautiful and I'm currently using this design for all mental conceptural imagery, but apparently it can only carry a measly 5kg. Why? It's also 539g (though most other listings state 250g). I once found 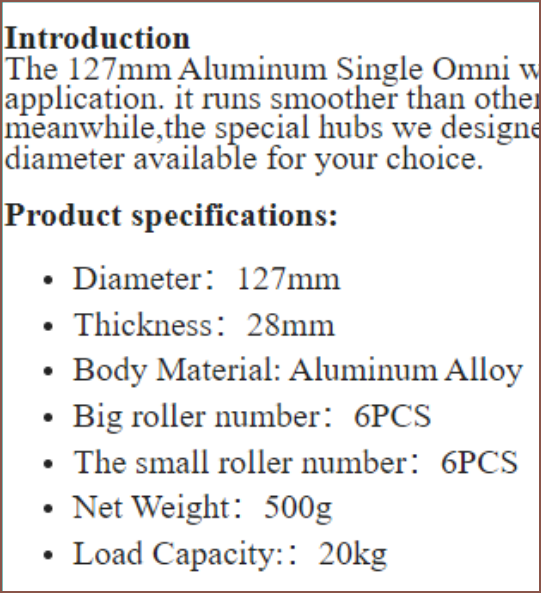 Then there's this 740g wheel that can carry 40kg:
Then there's this 740g wheel that can carry 40kg: I do wonder if the alternating wheels for all but the "platinum skin" one would cause any usability of safetly issues.
I do wonder if the alternating wheels for all but the "platinum skin" one would cause any usability of safetly issues. Back in late 2018, I planned to buy some copper PETG and print an internal frame so that it was always cylindrical like in the images. Well I never got around to that and now I've learned that it's best to design in CAD before buying a £63 roll of Extrudr PETG. I've only used like half a metre of this massive 30cm roll, and it was a reason why many of my current projects have copper accents.
Back in late 2018, I planned to buy some copper PETG and print an internal frame so that it was always cylindrical like in the images. Well I never got around to that and now I've learned that it's best to design in CAD before buying a £63 roll of Extrudr PETG. I've only used like half a metre of this massive 30cm roll, and it was a reason why many of my current projects have copper accents.  I knew I should've written this log earlier, because whilst looking for the above example image, I found out that even getting over curbs and steps is a solved problem:
I knew I should've written this log earlier, because whilst looking for the above example image, I found out that even getting over curbs and steps is a solved problem:

 Anyway, it looked a lot more backpack-like.
Anyway, it looked a lot more backpack-like.  First I tried out a design where the kelvinA logo is centered at the bottom of the face and the top line of the T.
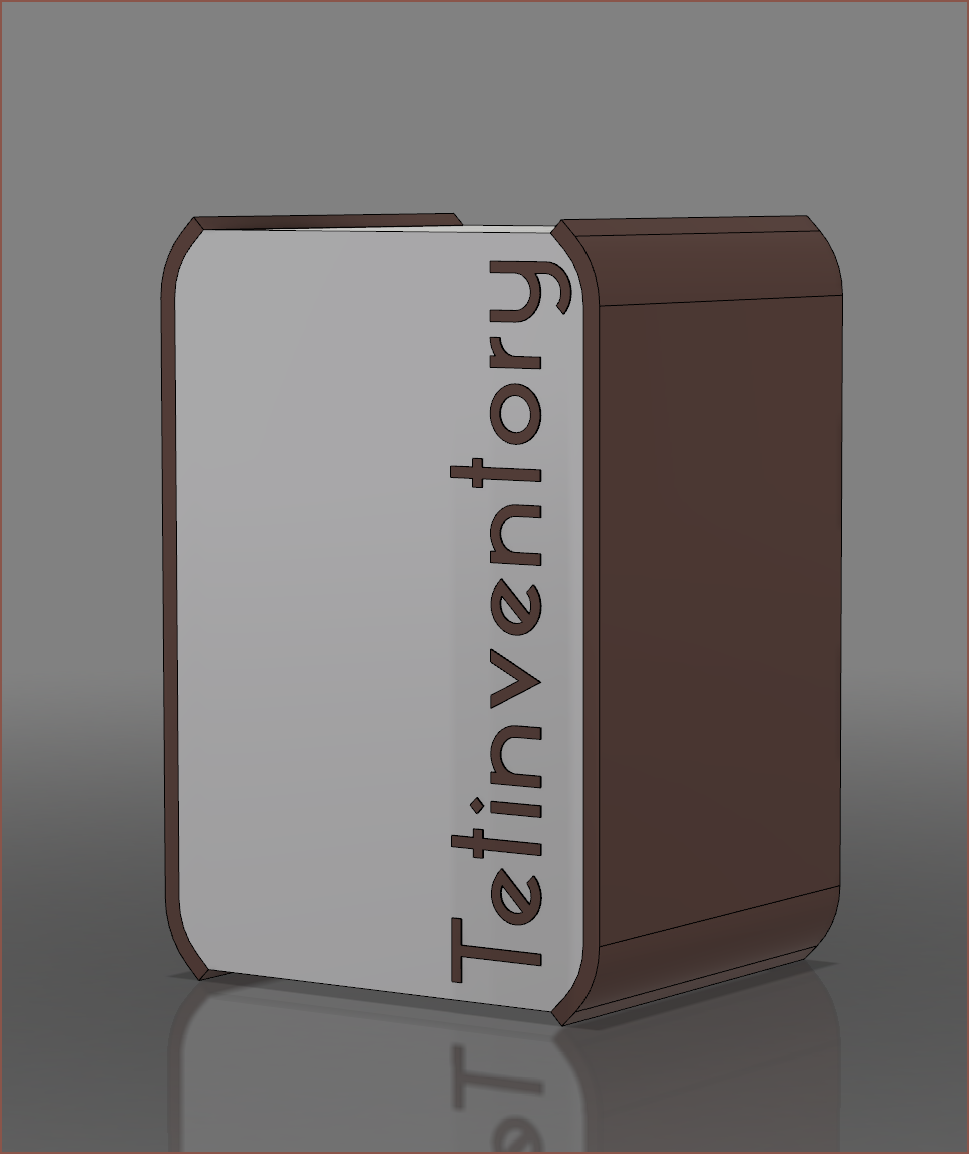
First I tried out a design where the kelvinA logo is centered at the bottom of the face and the top line of the T. I then tried the more... lawful branding design, as well as extending the brackets and adding the gyro ball cup holder. Added some feet and rendered the design:
I then tried the more... lawful branding design, as well as extending the brackets and adding the gyro ball cup holder. Added some feet and rendered the design:



