Greg Zumwalt
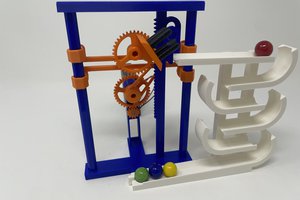
Greg ZumwaltOne of my first 3D printed designs was “Mechanical Pseudo Sin Wave” (). Published in 2013, that model utilized a 3D printed chassis, along with 3D printed crank, cams and lifters, to mechanically simulate a sin wave. Combining the principles of that design with my fondness for marble machines resulted in the latest addition to my Marblevator series, “Marblevator, Wave”.
In this model, the cams, lifters and track segments move in a pseudo sin wave motion, carrying a “marble” (ball bearing) from the end of the track to the start in the trough of a "wave". I designed the model to use 8mm ball bearings, but as can be seen in the video with careful adjustment 11mm ball bearing may be used as well (I will publish a track with lower sidewalls better suited for both 8 and 11mm ball bearings soon).
Designed using Autodesk Fusion 360, sliced using Ultimaker Cura 14.12.1, and 3D printed in PLA on Ultimaker S5s.