 deʃhipu
deʃhipuWe have pretty good information about the motor shield:
- The H-bridge is TB6612.
- The microcontroller is STM32F030.
- We have a schematic: https://www.wemos.cc/sites/default/files/2016-09/mini_motor.pdf
- We have the Arduino library for talking to it: https://github.com/wemos/WEMOS_Motor_Shield_Arduino_Library
- And, last but not least, we finally have the source code of the original firmware: https://github.com/wemos/Motor_Shield_Firmware
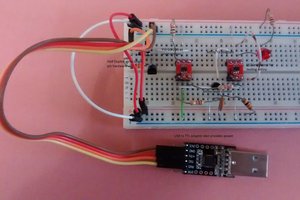
The shield has a serial interface for programming broken out, and that chip is supposed to have a bootloader built-in, so hopefully we will be able to just use stm32flash and an USB2TTL adapter to program it.
There is a nice dev environment template for this family of microcontrollers: https://github.com/szczys/stm32f0-discovery-basic-template
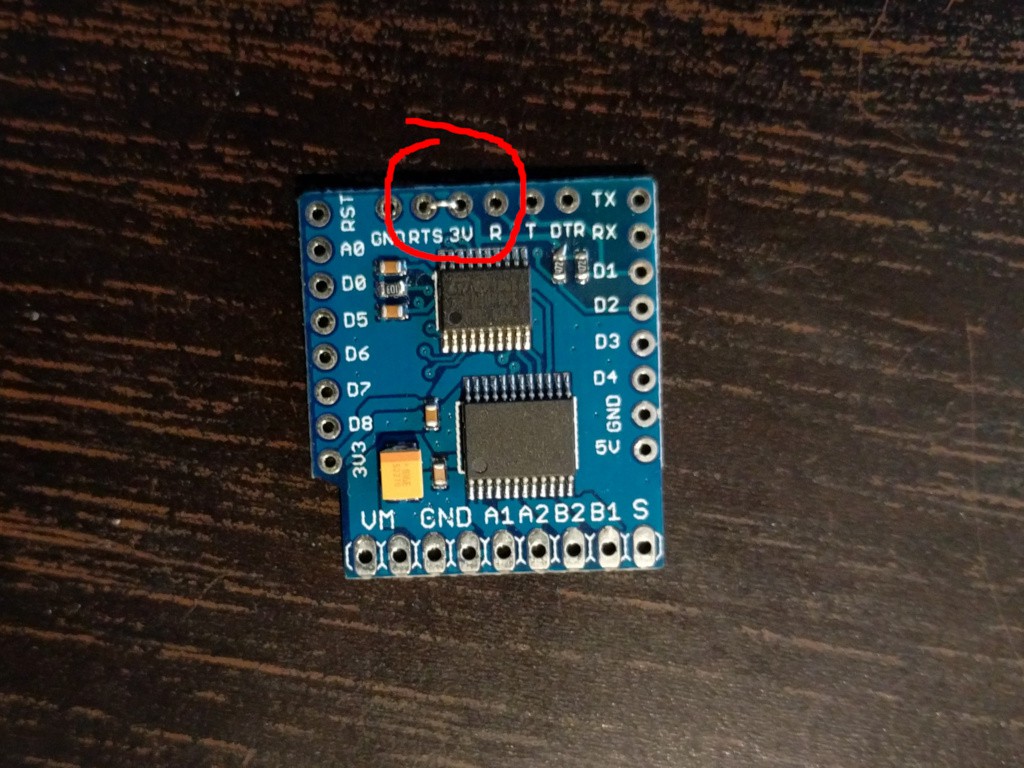
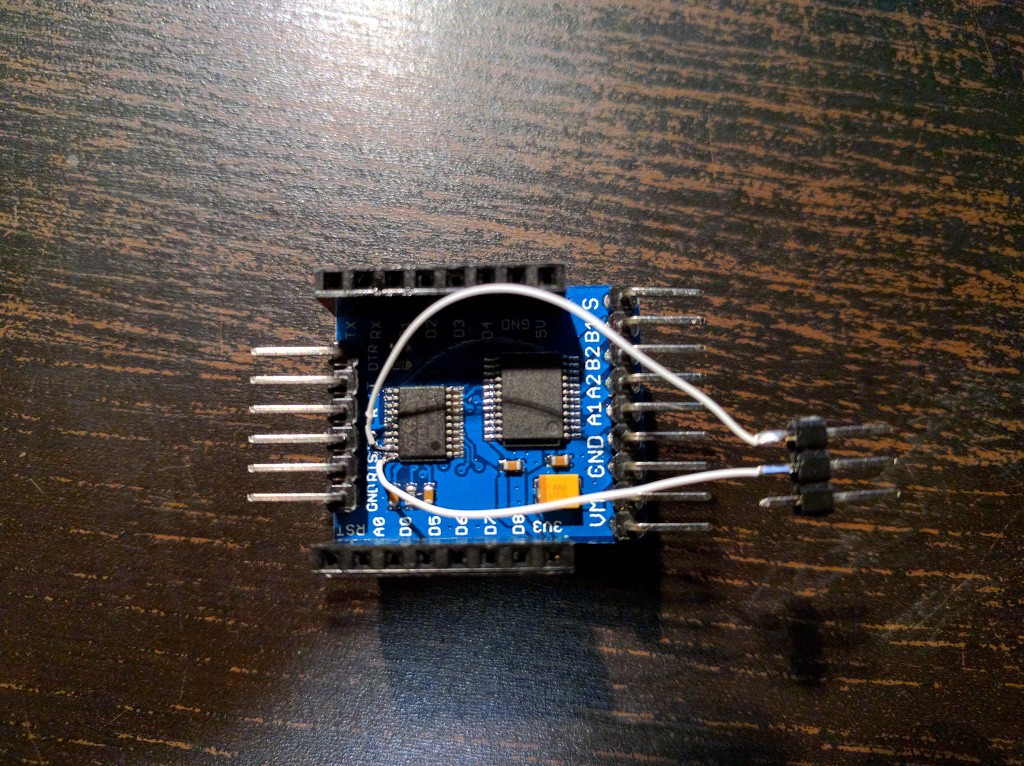 Be careful to not short them with the legs next to them. This is probably the hardest part.
Be careful to not short them with the legs next to them. This is probably the hardest part.






 Miklos Marton
Miklos Marton
 seasonalvegetables3
seasonalvegetables3
After cloning from GitHub, the make doesn't work. What do I need to do in order to do it?
I run it from cmd window.
More details: I have several motor shields from AliExpress. None of them is detected during I2C scan. The Ad0/1 resistors are not attached to the boards, yet the I2C scanner doesn't recognize at Hex 2D. I have no idea what is the Motor shield's version: no marking on the pcb. I use WEMOS D1 mini on top of the shield.