 Nait Malek Youssef
Nait Malek YoussefHistory:
Sometimes, when I go jogging in the woods, I notice that there is some trash (bottles, paper, glass ...) thrown in the forest. And sometime I wanted to collect all that trash, but why not build a robot that can do that automatically. The idea is to have a robot built mostly from reused materials, such as, hoverboard, plastic or wood box, metal pieces for the robotic arm, web camera. The robot will used image recognition to detect the presence of trash in the woods, then move toward it, collect it using the robotic arm and throw it into the box. So the trash will be collected by the robot while I’m doing my favorite sport.
The problem:
The main problem that the robot will solve is: identify trash in the forest (and/or in the beach) and collect them.
Proposed solution:
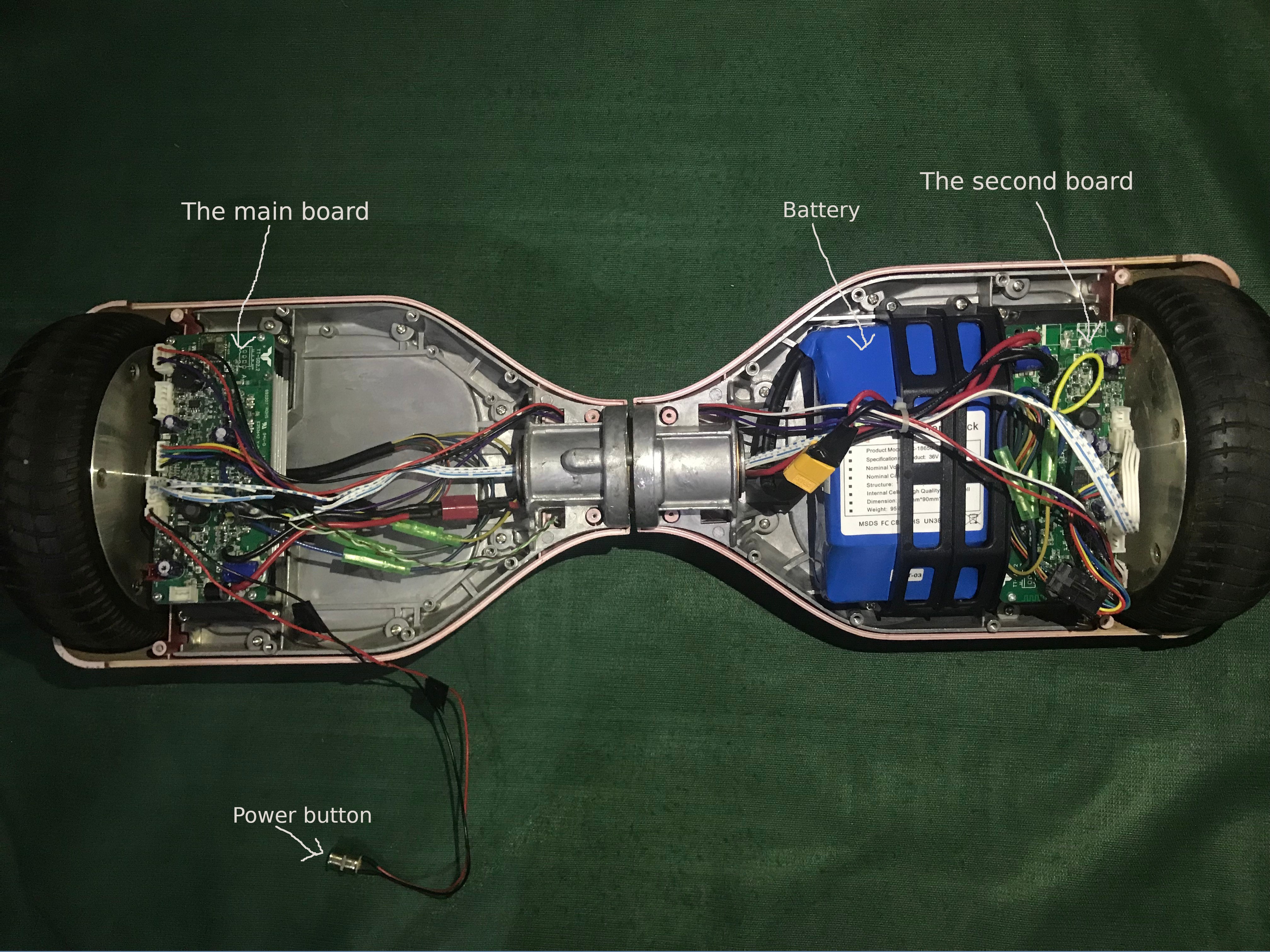
A robot that is build using already existing materials. The robot brain is a NVIDIA Jetson Nano board. The body is a box and a recycled hoverboard. And the robot will have an arm to collect the garbage using a robotic arm constructed from recycled materials also.
Main robots’ tasks:
The robot will execute the following tasks:
- Identify the existence of any kind of trash using image recognition (paper, bottles, plastic …)
- Move toward the identified object and collect it
- Log the position and the status of the task (success or failed)
Fist task: trash identification:
The robot will use image recognition in order to identify the existence of any king of trash in the woods/beach. A model will be trained upon various images of mostly all kind of trash. The model will be then used to identify the objects in a stream of images coming from a camera attached to the robot. The used camera could be a USB webcam or a Raspberry camera. For the processing unit, a NVIDIA Jetson Nano development board will be used.
Second task: trash collection:
After identifying the trash location, the robot will move to the position and collect the trash using the robotic arm.
Third task: logging:
Logging will help us to determine the efficiency of the robot. After any identification of a trash and attempt to collect it, the robot will log the coordinate of the position and the status of the operation, if it succeeded or failed.
This log will be then used to improve the robot algorithm, regarding moving and collecting the trash.
Challenges:
The process of building this project might raise the following challenges:
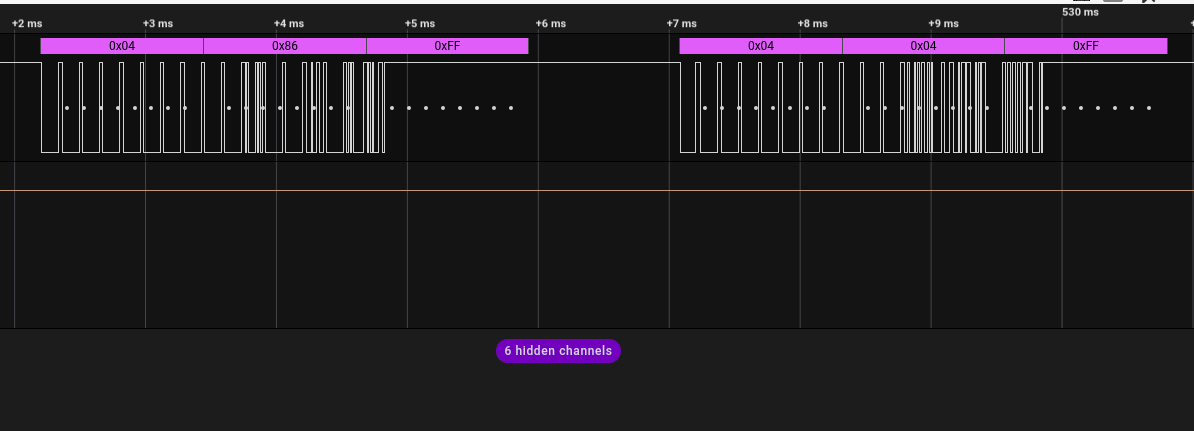
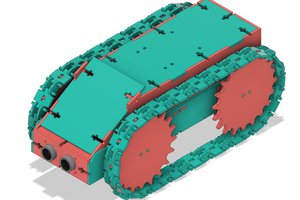
First, the robot will use a hover board as mechanism to move and navigate. So first we need to figure out how to control the hoverboard using the NVIDIA Jetson Nano. In fact there are already projects that use Arduino to control the hoverboard, so it won’t be a real problem except some tweaking and configuration. Also, there might be a problem about the wheels, especially when using the robot in the beach. To overcome this problem, another design might be investigated in which we will use a tank wheel.
Second problem that the robot might encounter is regarding the sense of dept. After detecting the trash object, the robot need to know the exact distance and how to collect the object using the arm. To overcome this problem, we might implement an algorithm to processed the distance just from the image, or use other solution that might include a second camera or even a LIDAR.
The third problem is related to the autonomy of the robot. For instance all the component of the robot will run from the hoverboard battery. However, a solar panel might be added in order to charge the battery when needed.
Built process:
- Train a model for trash recognition
- control the hoverboard motors using the NVIDIA Jetson Nano
- built the robotic arm
- Assemble everything
- test and improvement







 Dave Niewinski
Dave Niewinski
 igorfonseca83
igorfonseca83
 Keith Elliott
Keith Elliott
This project has tremendous commercial potential because American freeways have a tremendous amount of litter and insufficient personnel to pick it up. Any state would buy an army of these if (1) they were sufficiently big (so they wouldn't have to be constantly emptied), (2) could report when they were full, (3) included anti-theft measures. Suggested name: LIT-R-PIK-R-UP-R (ie, litter picker upper). This idea could easily raise lots of $ on Kickstarter.