 EK
EKWelcome, Generator Prototype 1.0! This is a small version of future scaled-up models.
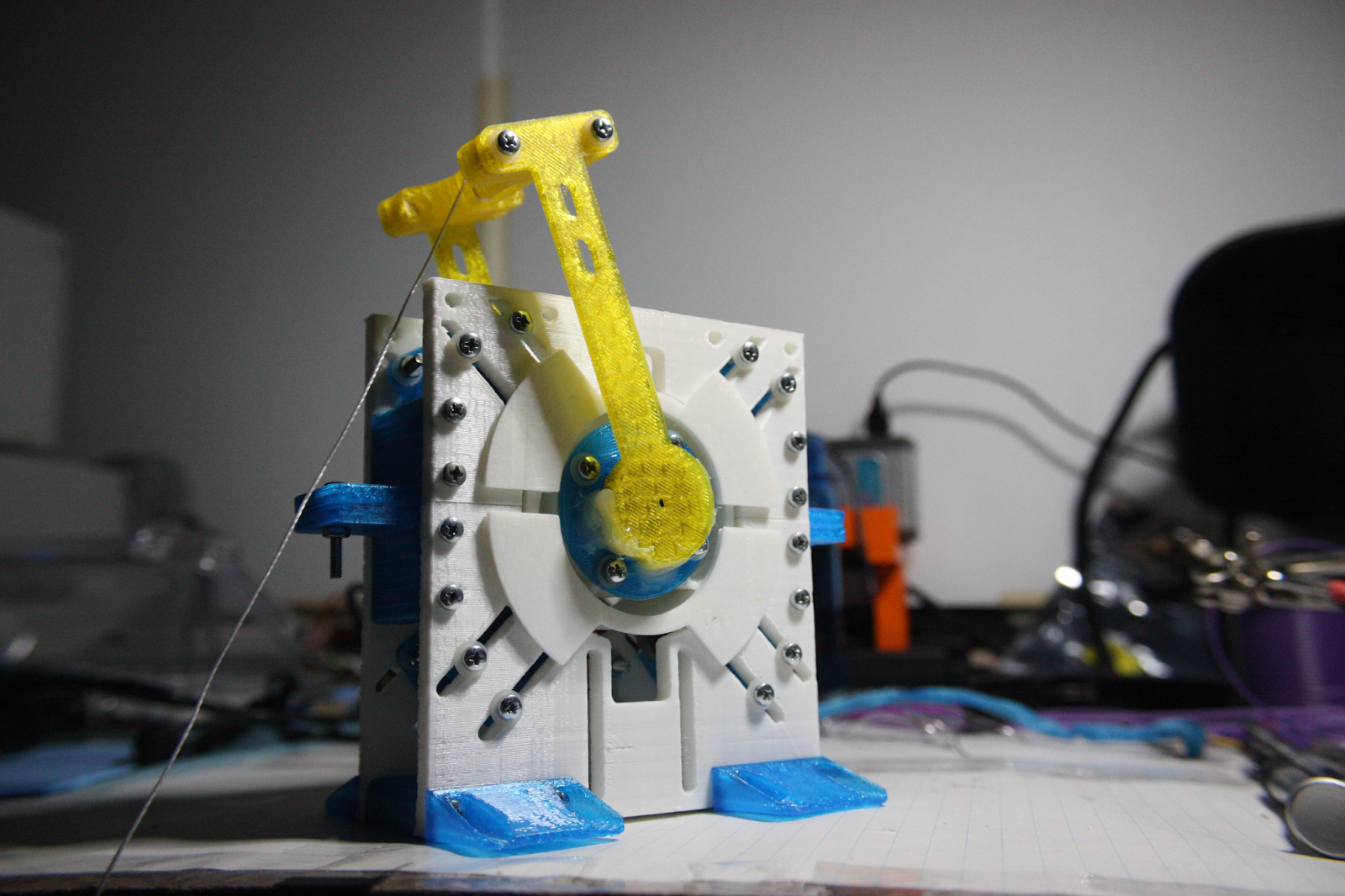
The goal of this prototype was to be a quick MVP to test the generator with the kite, as we need that data to move forwards with the electronics. This requires a free-spinning wheel that a DC motor axle makes contact with to generate the electricity.
More information about the CAD design and constraints here
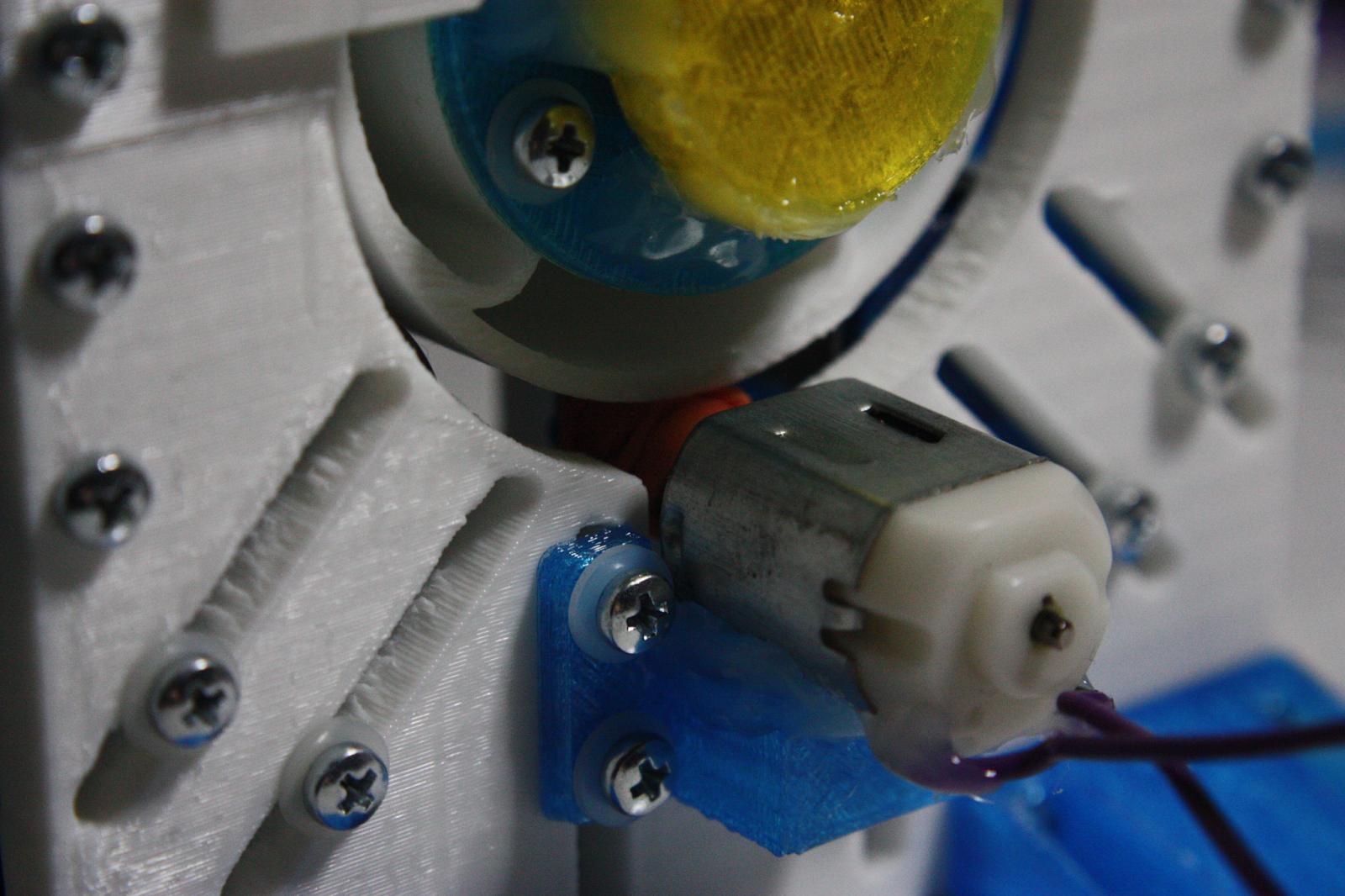
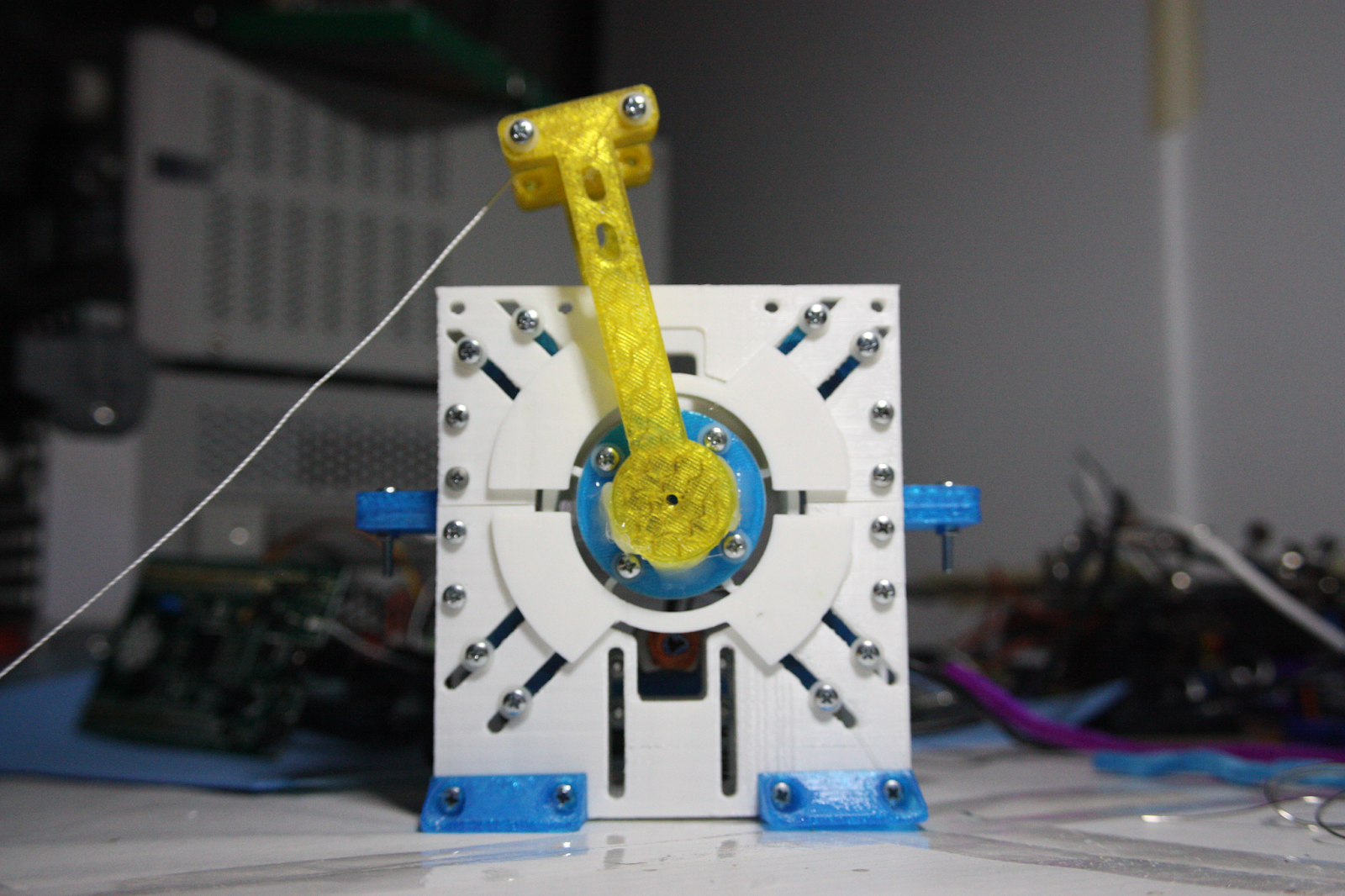
The small DC motor is mounted to the back of the generator, making contact with the wheel. Multiple materials for the axel were tested, including electrical tape, gaffers tape, and a rubber band. The rubber band provided the most grip. This could be due to the geometry of the rubber band having more surface area than the other two methods.
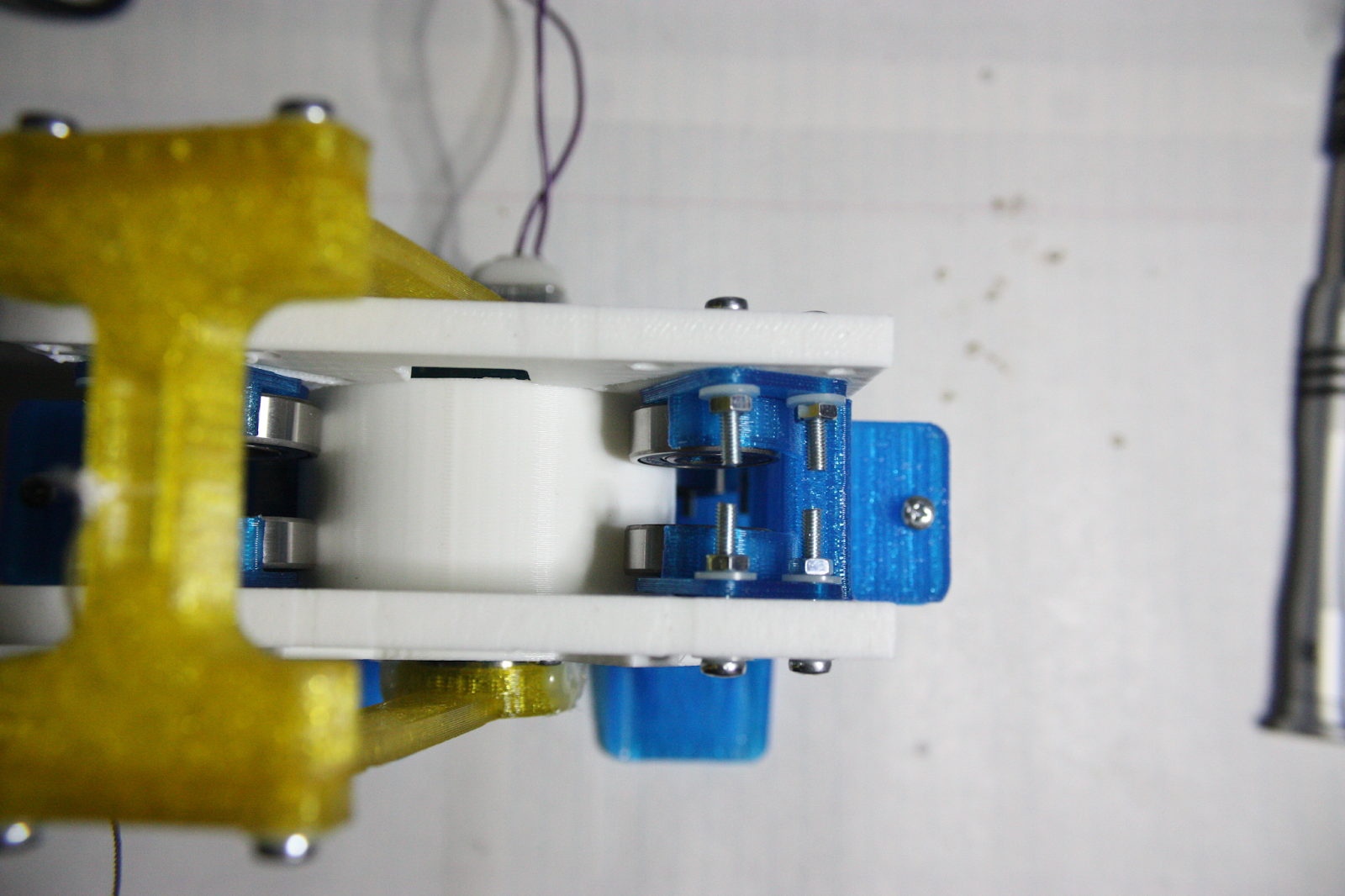
The bearings at the top are free moving in their fastener slots to apply downwards pressure on the wheel. The DC motor with rubber band on its axle is applying the upwards force.
Most importantly, from this prototype we are able to conduct a benchtop test of the DC motor as a generator. Moving the kite armature back and forth every 0.6 seconds, a voltage of 70 mV to 260 mV peak to peak can be generated.
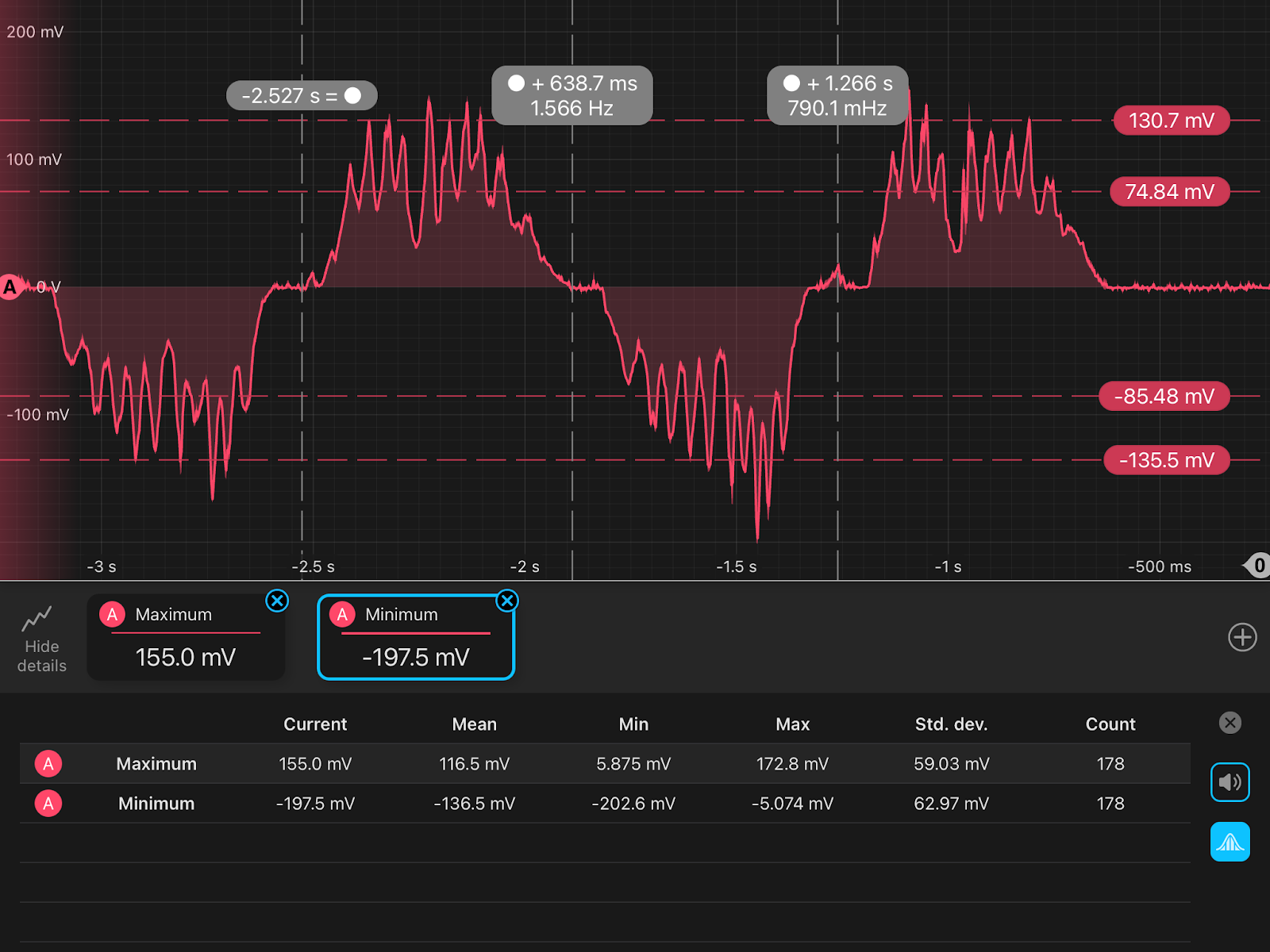
Data from the oscilloscope available here:
https://github.com/RobotGrrl/KitePropulsion/tree/master/Data/generator_05-01-22
This data enables us to start determining which energy harvesting ICs would be best suitable.
Here is a video of the benchtop prototype test in action:
The next step will be to test the kite attached to the mechanism. This will verify that the tension on the line from the drag force of the kite will be able to move the armature and spin the wheel.
The kite line is to be attached to the yellow armature. There is enough clearance for a carabiner, making the user experience easier with a quick release and not dealing with knots in tiny strings.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.