 EK
EKWhat if the kite could spin a conveyor belt platform via an external wheel? Instead of capturing a rotating wheel inside a housing with contact bearings. The first step is to verify that the kite can move a wheel on the ground.
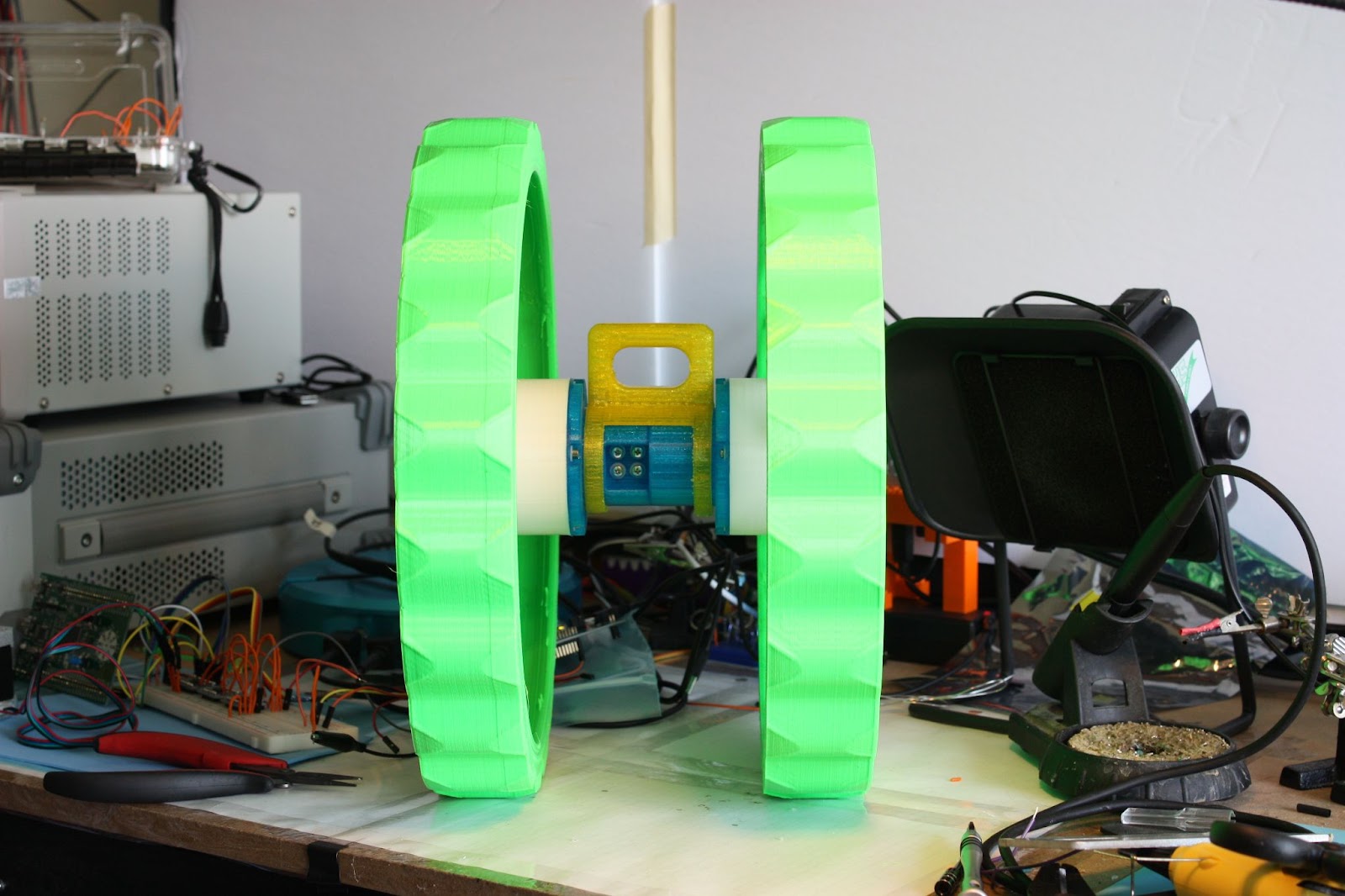
The Roll Experiment design is comprised of 3 main pieces:
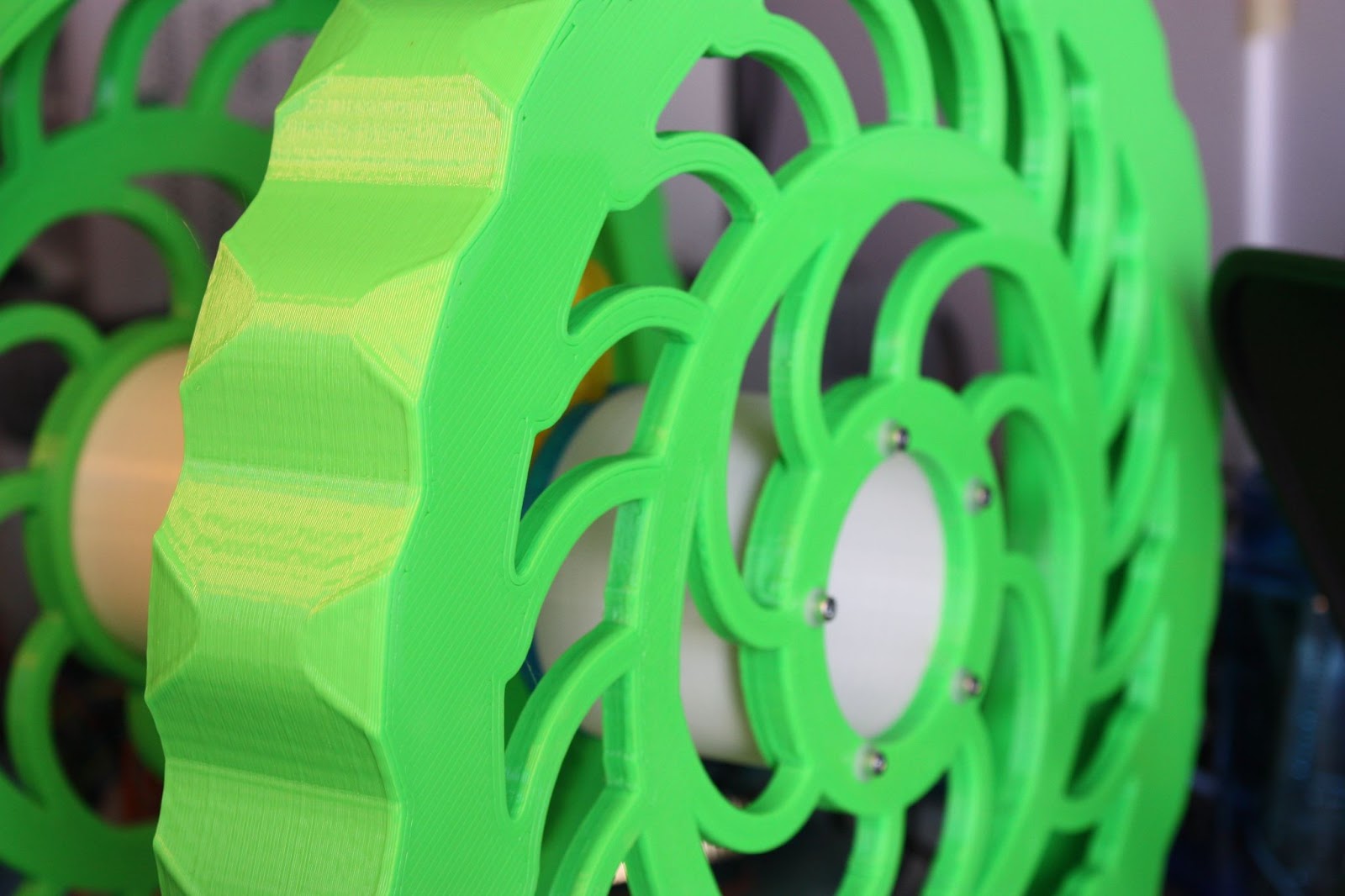
- 2 large 30 cm diameter wheels
- Axels and mating pieces
- Collar with carabiner clip
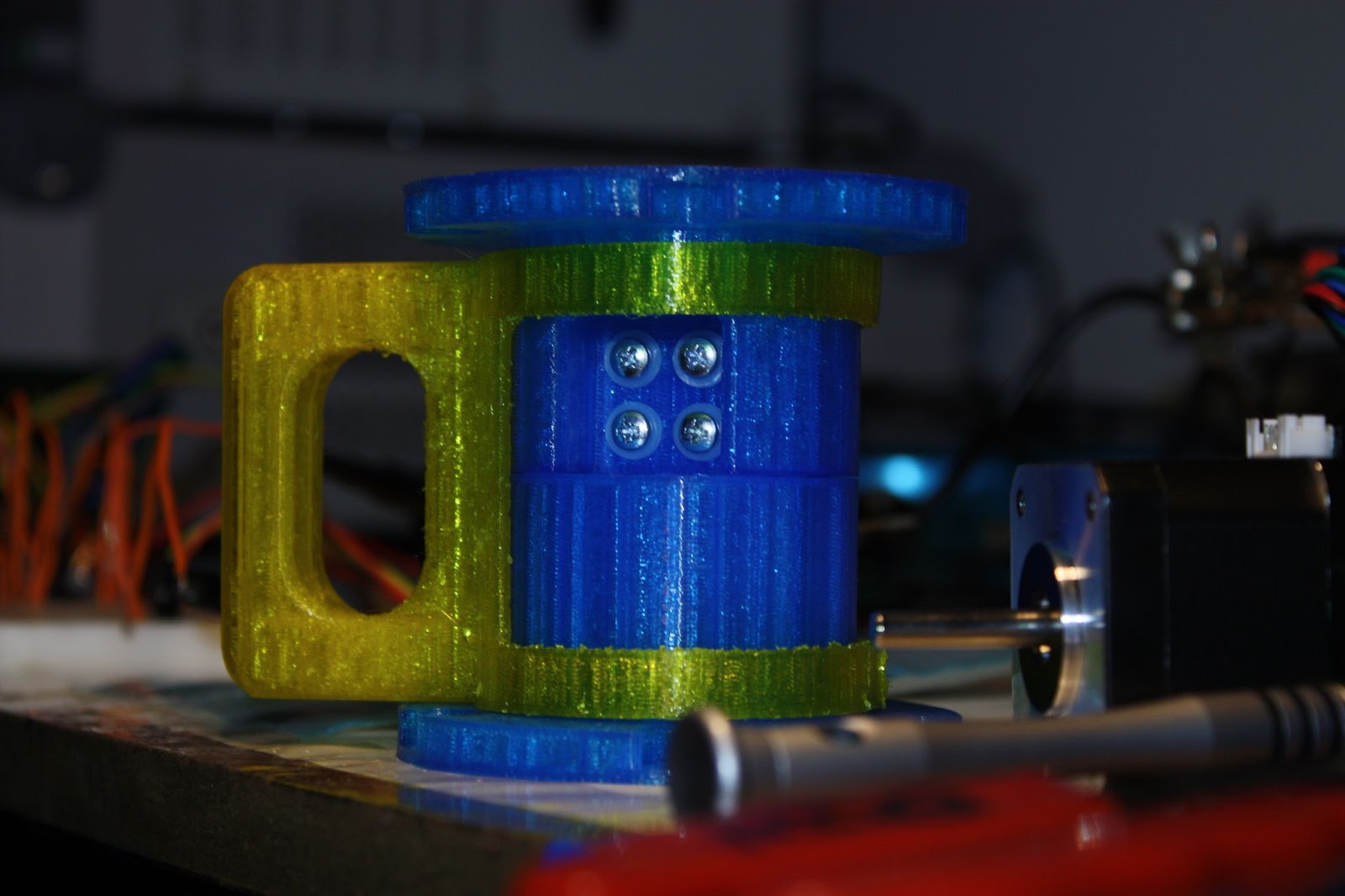
Cross-section view to show the mating axels | Complete view |


Both wheels are fixed to each other, they do not rotate independently. The 2 wheels are recycled from a previous project, which were 3D printed on a large format FDM printer in PLA.

The collar (yellow) is freely rotating about the axle (blue). This is where the carabiner attaches. The axle pieces mate and are fastened in place with 4x M3 fasteners.

The axle extends from the wheel using white ‘spacers’ with heat-set inserts.


After fabrication and assembly, it was time to test it. However, the kite was grounded at 0.0 km/h winds. Testing will happen next time!

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.