 Epsilon
EpsilonIn this post, we organize the key components from the previous posts into an architecture diagram. Along the way, we identify a few new components.
None of what’s shown here is set in stone. The diagrams below contain some speculative pieces and there are quite a few loose ends to tie up as we get further into the project.
The Nexys Configuration
 BoxLambda Draft Architecture Block Diagram for Nexys A7-100T.
BoxLambda Draft Architecture Block Diagram for Nexys A7-100T.
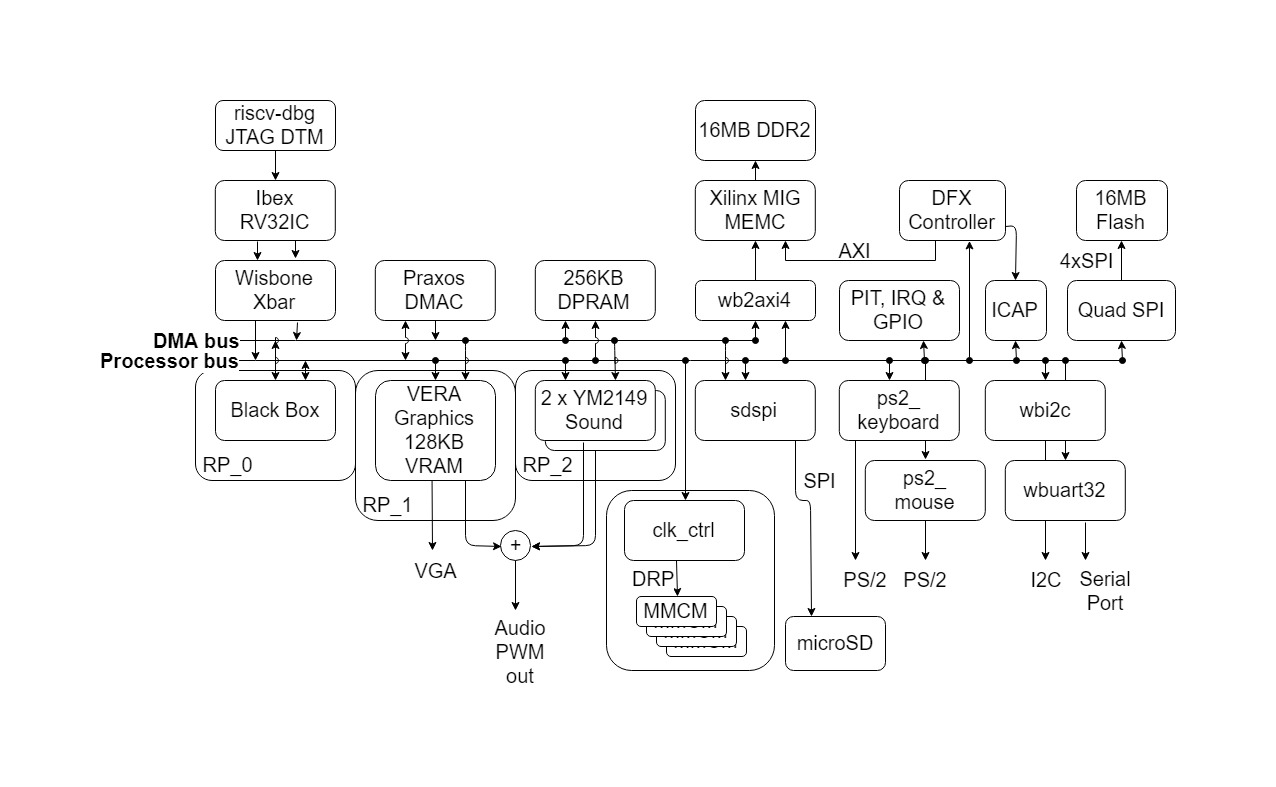
This is a draft architecture diagram showing the Nexys A7-100T configuration. Further down, I’ll show the Arty A7-35T configuration.
Internal RAM
The system is configured with 256KB of Dual-Port RAM (DPRAM) and 128KB of Video RAM (inside the VERA module). The A7-100T has 607KB of Block RAM in total, so more than enough Block RAM should be left over for other purposes, e.g. for the Black Box Module (see below).
The CPU has memory-mapped access to DPRAM. As long as no other Bus Masters are competing for access to the same bus, instructions executing from DPRAM will have a fixed cycle count.
DMA Bus and Processor Bus
The DPRAM is hooked up to two system buses: a DMA bus and a Processor bus. Bus masters (currently only CPU and DMAC) have access to both buses as well, but the intent is that the DMA Controller uses the DMA bus for MEMC<->DPRAM transfers and the CPU uses the processor bus for DPRAM access. This intent is not hardwired into the system, however. The DMA Controller can set up transfers over the processor bus, and the processor can access external memory over the DMA bus. The two system buses are there to give bus masters some flexibility to stay out of each other’s way.
Note that, besides access to external and internal memory, the DMA Controller also has access to VERA, the sound cores, and the SD SPI module via the DMA bus.
Both the Processor Bus and the DMA bus are 32-bit pipelined mode Wishbone buses.
The Interconnect
A bus on a block diagram is just a line connecting blocks. In reality, the Interconnect consists of Cross Bars, Arbiters, Address Decoders, and Bridges. I will follow up with an architecture diagram showing the BoxLambda Interconnect details.
To build the Interconnect, I will make use of the components contributed by the gentlemen below:
- Alexforencich published a collection of components that can be used to build an Interconnect: https://github.com/alexforencich/verilog-wishbone/
- ZipCPU did the same. His components are well-documented, including cross-references with insightful articles on the ZipCPU website: https://github.com/ZipCPU/wb2axip
CPU Configuration
The Ibex CPU configuration is shown as RV32IC, the I and the C indicating Integer and Compressed instruction set, respectively. I would like to include the extensions for integer multiplication and division (M) and bit manipulations (B) into the build as well. Those extensions are going to take up a considerable amount of space, however, and will also have an impact on timing closure. I’m going to defer the decision on those extensions until we have more insight into this project’s FPGA utilization and timing.
Note that there’s no Instruction or Data Cache. Code executes directly from DPRAM or DDR memory. Data access also goes straight to DPRAM or DDR memory.
The Black Box, and other Reconfigurable Partitions
The Black Box Partition is an empty area in the FPGA’s floorplan. This is where you can insert your application-specific logic. Do you need hardware-assisted collision detection for your Bullet-Hell Shoot’em Up game? Put it in the Black Box. A DSP? A CORDIC core? More RAM? As long as it fits the floor plan, you can put it in the Black Box region. The Black Box has bus master and slave ports on both system buses.
Notice that the Black Box sits inside RP_0, Reconfigurable Partition 0. A Reconfigurable Partition is a region on the FPGA where you can dynamically load a Reconfigurable Module (RM) into. Going back to the previous examples, the collision detector, DSP, CORDIC core, or RAM module, would be Reconfigurable Modules. You can live-load one of them into RP_0.
VERA and the two YM2149 cores are also placed into their specific Reconfigurable Partitions (RP_1 resp. RP_2), so you can swap those out for a different graphics and/or sound controller.
The CPU, DMAC, MEMC, and I/O peripheral blocks are all part of the so-called Static Design. These can’t be swapped out for other logic on a live system. Any changes in these blocks require an update of the Full Configuration Bitstream (as opposed to a Partial Configuration Bitstream containing a Reconfigurable Module).
Reconfigurable Modules require a reconfigurable clocking strategy. That’s the role of the Clock Control (clk_ctrl) module. The BoxLambda Clocking Strategy is a topic for a future post.
New Modules
A few new modules popped out of the woodwork:
- PIT, IRQ & GPIO: a placeholder for Programmable Interval Timers, an Interrupt Controller, and General Purpose I/O. I haven’t settled on specific modules yet. To be revisited.
- DFX Controller: The actual loading of a Reconfigurable Module into a Reconfigurable Partition is handled by the DFX Controller. DFX stands for Dynamic Function Exchange which is Xilinx-speak for Partial FPGA Reconfiguration.
- ICAP: Internal Configuration Access Port. This module gives access to the FPGA configuration functionality built into Xilinx FPGAs. We’ll use the ICAP to implement in-system updates of the Full Configuration Bitstream, loaded into the FPGA upon boot-up.
- Quad SPI Flash: This is a module provided by Xilinx, giving access to the Flash Memory device attached through a Quad-SPI bus. The non-volatile Flash Memory will hold the Full Configuration Bitstream(s), System Firmware, and non-volatile system configuration parameters such as keyboard type.
External Memory Access
The Memory Controller is equipped with an AXI4 port. That’s convenient because that’s also what the DFX Controller uses to fetch the Reconfigurable Modules’ bitstreams. To hook up the system buses, we use a Wishbone to AXI bridge. This bridge will introduce additional memory access latency, but that should be acceptable because this path should not be used for latency-critical operations.
Note that the CPU has memory-mapped access to DDR memory and can execute code directly from DDR memory. DDR memory access is not fully deterministic, however. CPU instructions executing from DDR will not have a fixed cycle count.
The Arty Configuration
 BoxLambda Draft Architecture Block Diagram for Arty A7-35T.
BoxLambda Draft Architecture Block Diagram for Arty A7-35T.
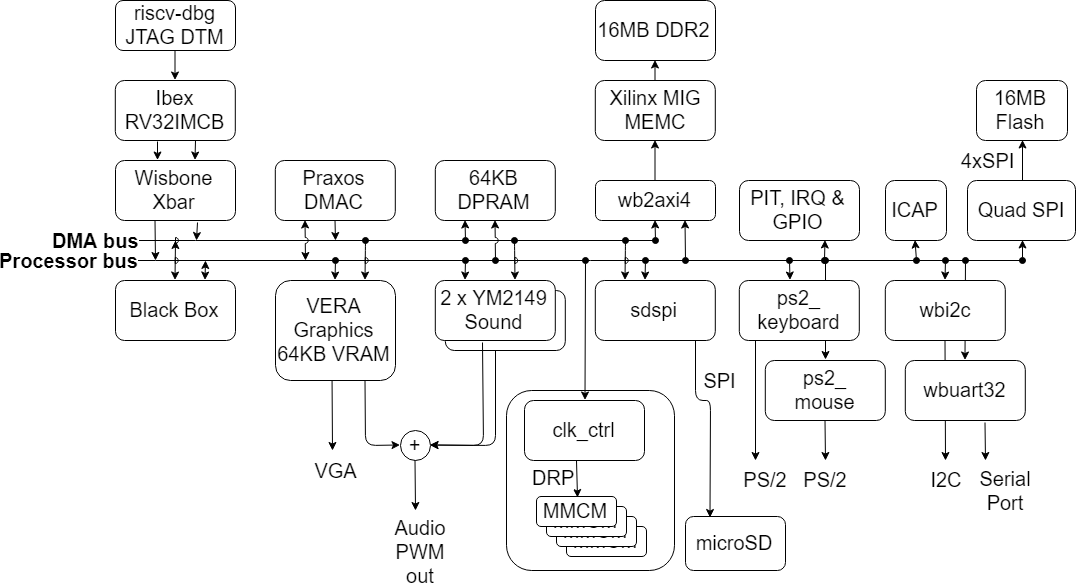
This is a draft architecture diagram showing the Arty A7-35T configuration.
DFX is not supported on the A7-35T. Neither is the Hierarchical Design Flow. This means we have to stick to a monolithic design. The RTL for all components is combined into one single design, which is synthesized, implemented, and turned into a single bitstream. There is still room for RTL experimentation in this build, but you won’t be able to live-load it. It’s going to require an update of the Full Configuration Bitstream.
The A7-35T FPGA has much less Block RAM than the A7-100T. As a result, the amount of video RAM has been reduced to 64KB, and the amount of DPRAM has been reduced to 128KB.
All other components are the same as in the Nexys Configuration.
Example Software Usage Model
BoxLambda users can make up their minds on how they want to set up this system. Here’s one possible software configuration:
- Deterministic and/or Time-Critical CPU code and data reside in DPRAM.
- Non-Time-Critical code and data reside in DDR memory.
- The CPU accesses DPRAM, DDR memory, and hardware blocks via the Processor Bus.
- DMA activity, if any, passes over the DMA bus.
Loose Ends
This post has briefly introduced several new concepts, and also raises questions on topics not mentioned so far:
- Partial FPGA Reconfiguration (DFX, Reconfigurable Partitions, Reconfigurable Modules).
- Interrupt Handling.
- The System Boot procedure (ICAP).
- In-System Updates (Quad-SPI Flash access).
- Clock Management (clk_ctrl).
- Bus Arbitration.
All of these topics will be further explored in future posts.
Interesting links
https://mega65.org/: BoxLambda is not the only retro-style computer that runs (or rather, will run) on a Nexys A7. Who knows, maybe someday BoxLambda will fit in the super-sexy MEGA65 form factor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.