 kwikius
kwikiusThe aim is to complete the MicroTransat Challenge autonomous division, but also to have fun and learn stuff along the way.
We start from the premise "small is beautiful". Why small?
The MicroTransat Challenge is well known to be extremely physically tough and the major practical part of the challenge is to prevent mechanical parst fom breaking.
Small objects can be harder to break than large ones, since the moments and forces on the parts are smaller, therefore we aim to work out the smallest possible vessel capable of holding the required equipment and use that as the basis of the design.
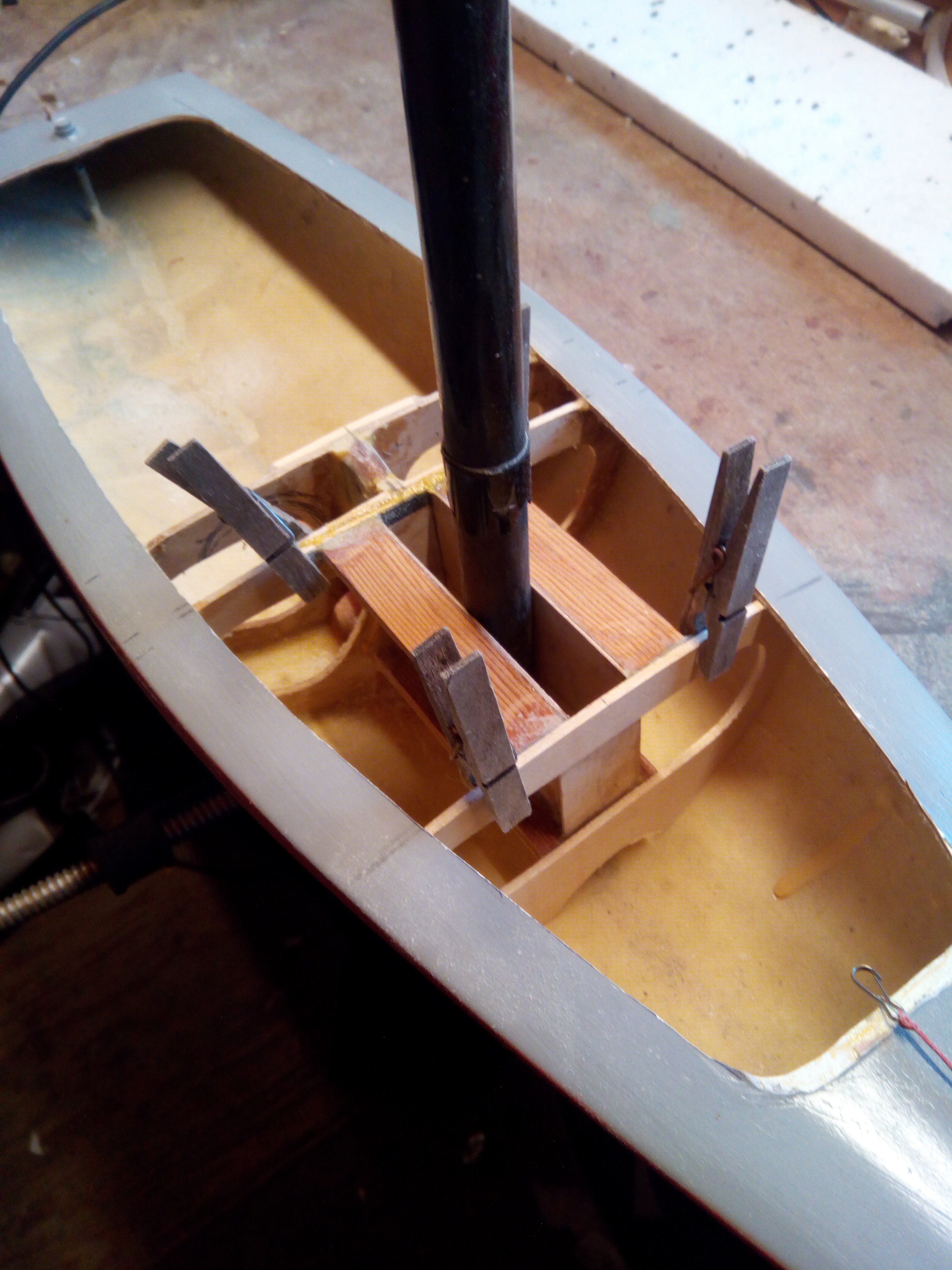
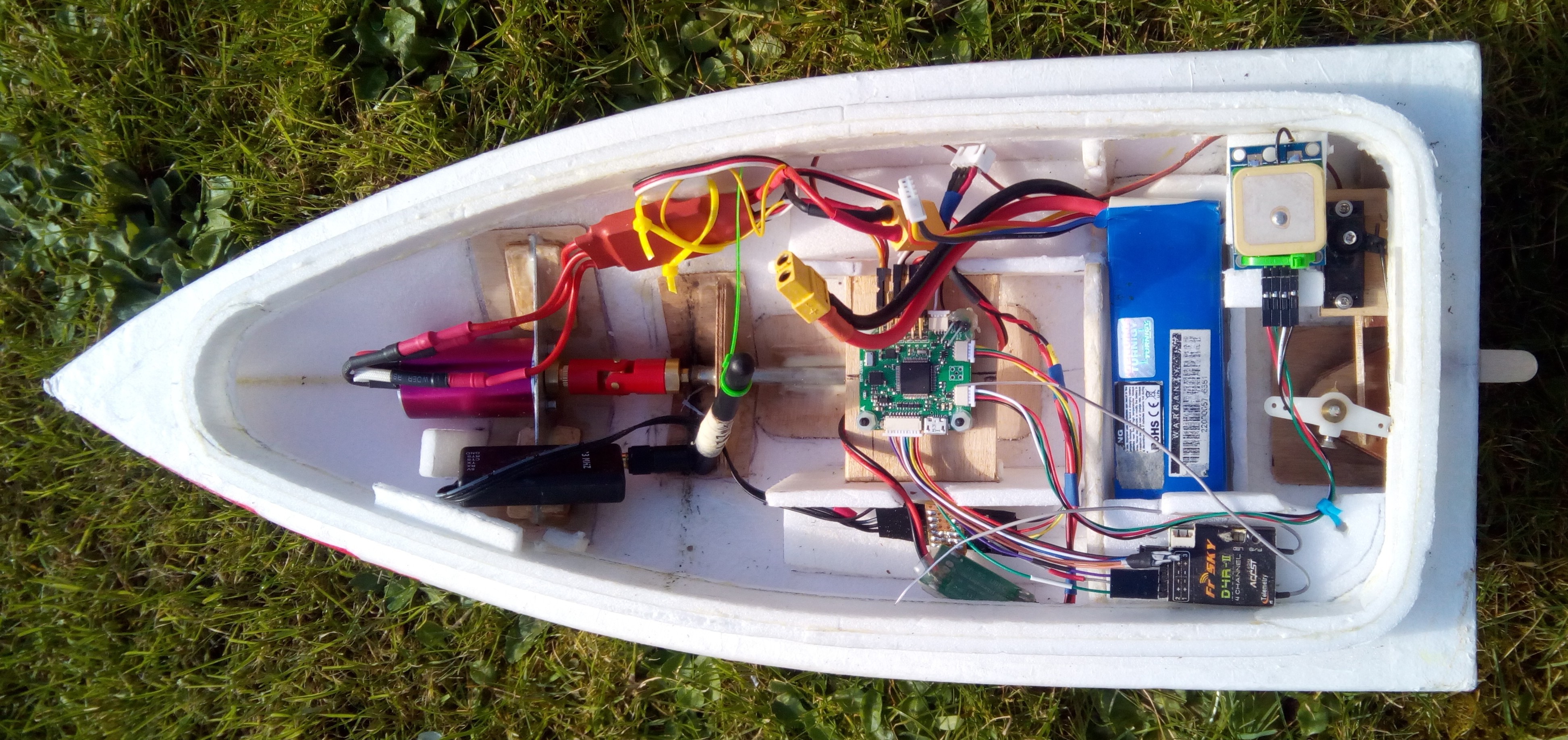
So far we have been using Ardupilot Rover on an autonomous electric boat to master the basics. Currently we are constructing a basic autonomous sailing boat to learn more about the specifics of autonomous sailing on inland waters.
The basic autonomous yachet has now been tested.






 Cees Meijer
Cees Meijer
 Phil Malone
Phil Malone
 Hardie
Hardie
 Quinn
Quinn