0%
0%
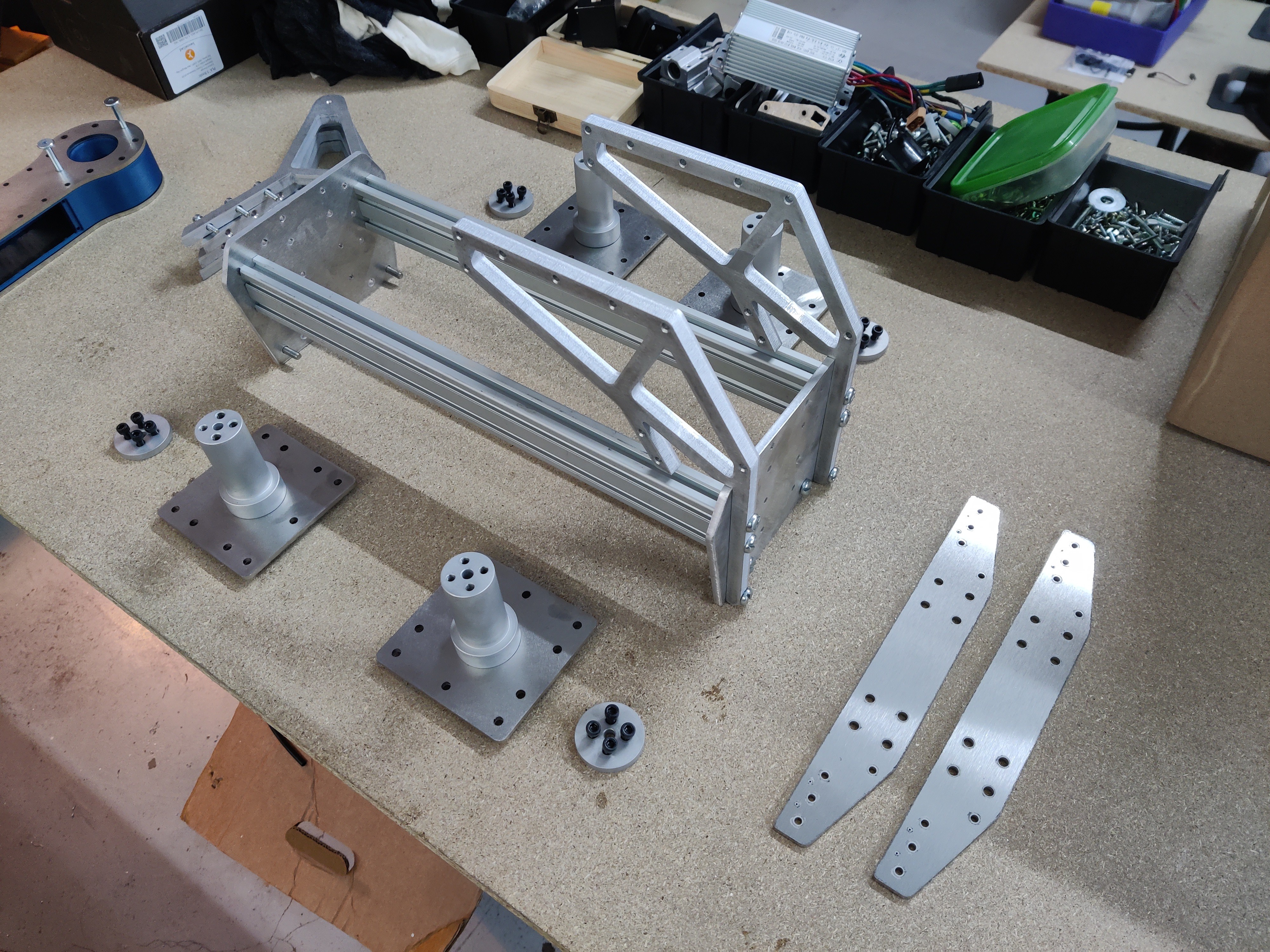
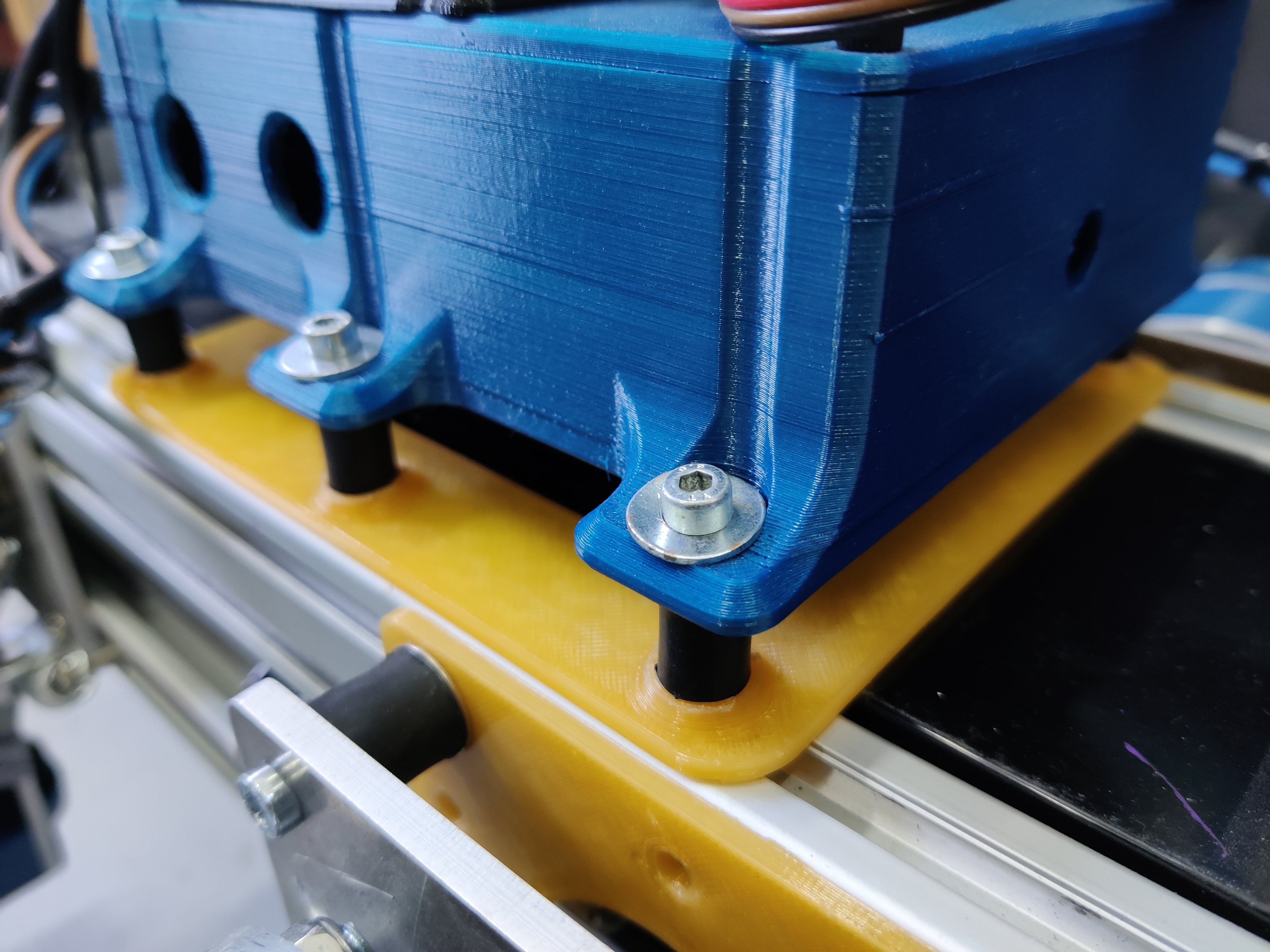
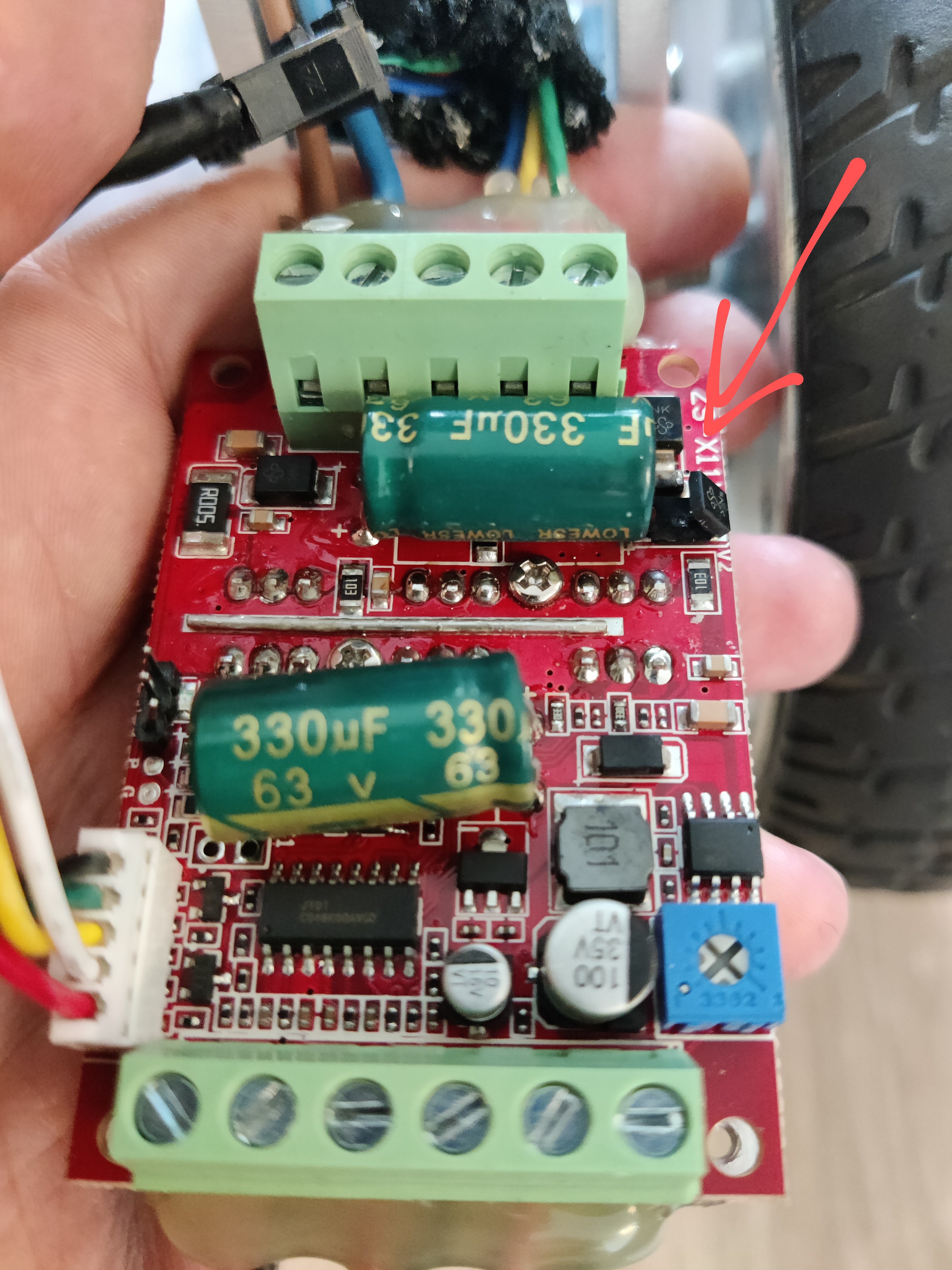
Not so small rover
A robotic rover builds with spare part from hoverboards.
 Tanguy
TanguyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










 davedarko
davedarko
 Salvador Hurtado Alia
Salvador Hurtado Alia
 Antonio Regueira
Antonio Regueira
Great project! What's next now that you had some successful driving tests?