 Guillermo Perez Guillen
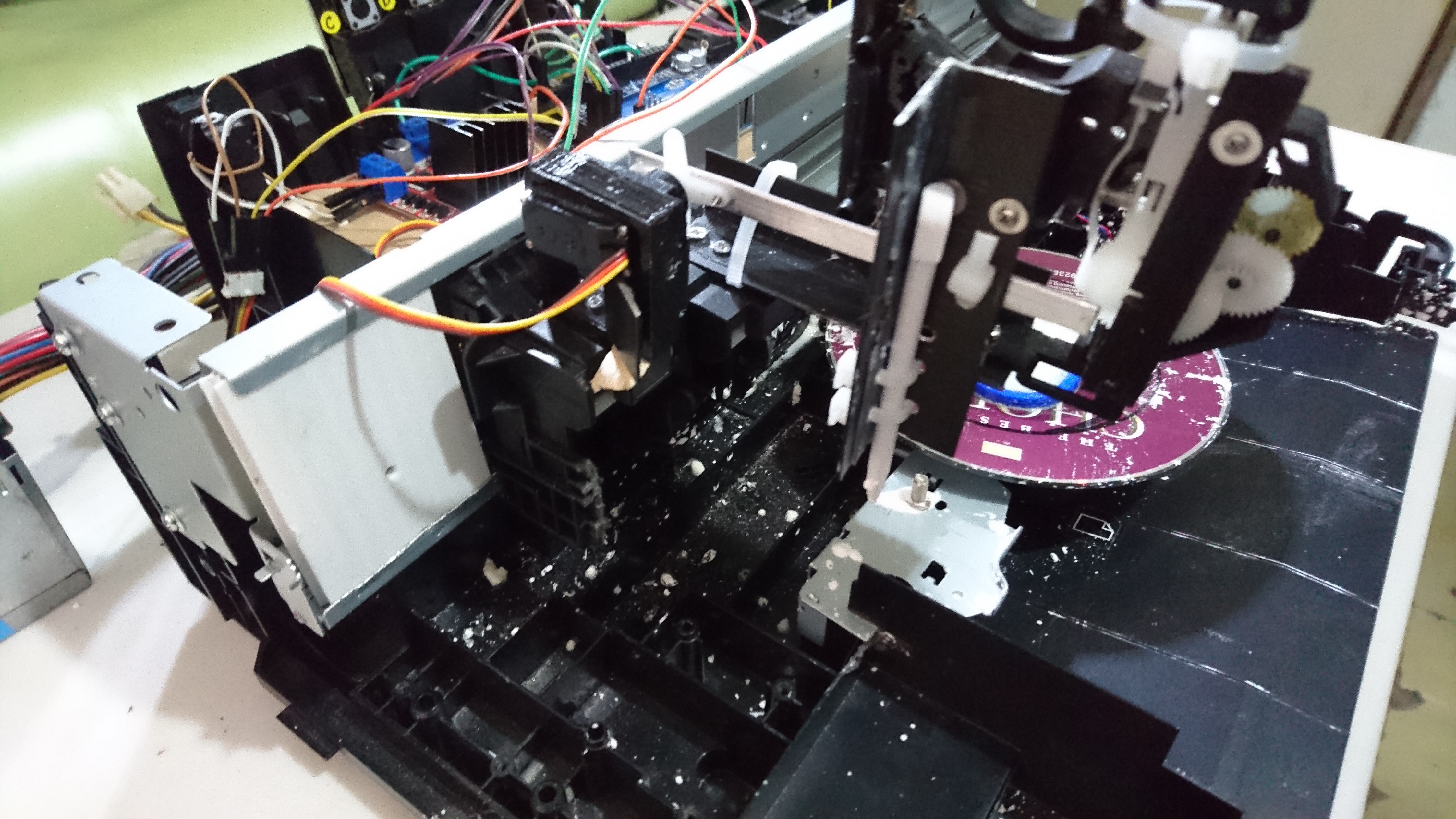
Guillermo Perez GuillenI have added this system in order to create circular or elliptical grooves in the figures created with the cornstarch paste. Once the grooves are finished, I have added cornstarch paste of another color to cover these slots. Below I show you the schematic diagram.
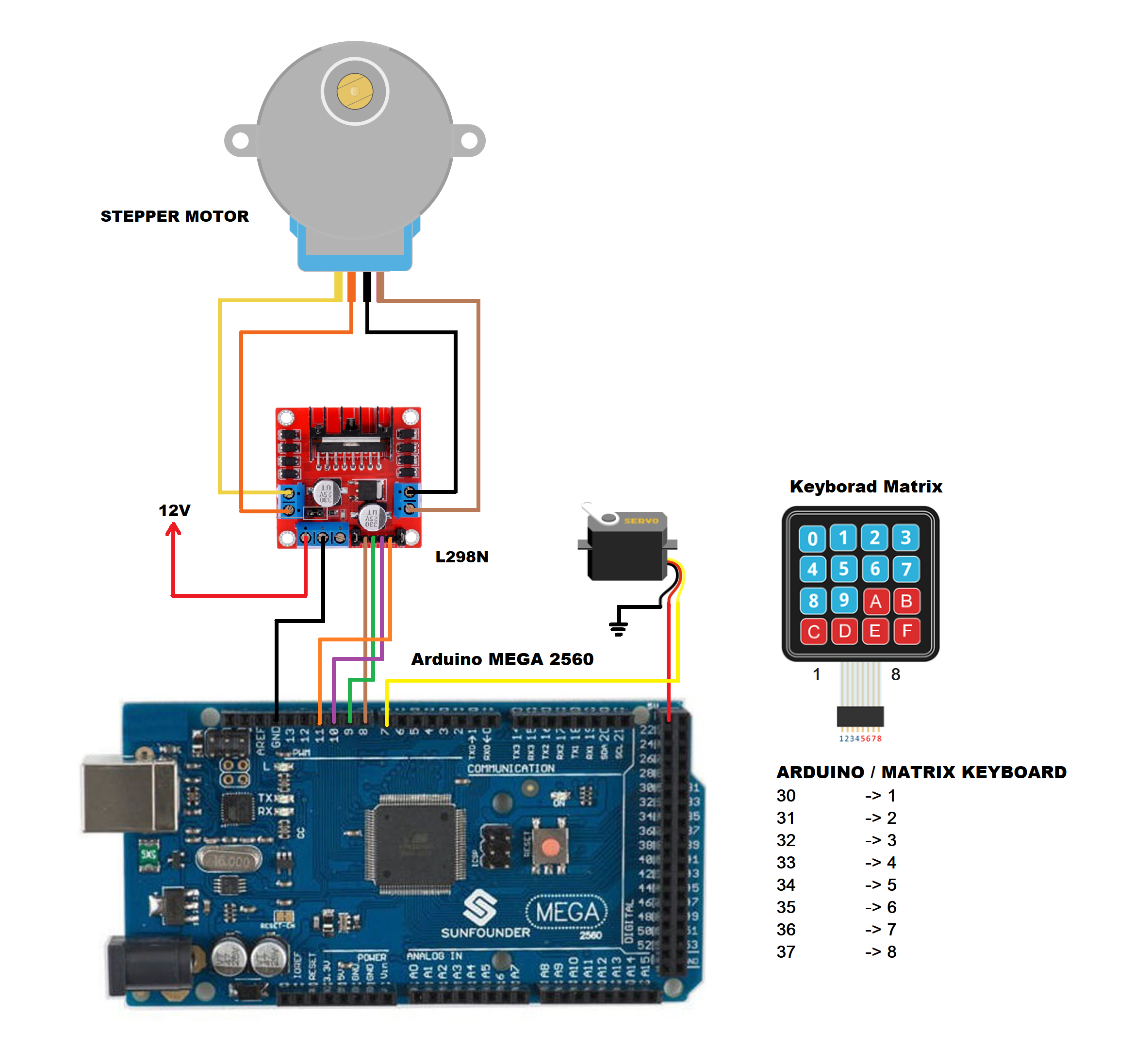
How does it work?
- By means of the matrix keyboard we control the punch mechanism, that is to say that by pressing the F key the mechanism goes down, and by pressing the E key the mechanism goes up.
- The matrix keyboard also controls the movement of the stepper motor. Eg, pressing the D key moves the mechanism to the first groove position, and If we press the C key, the mechanism returns to the origin.
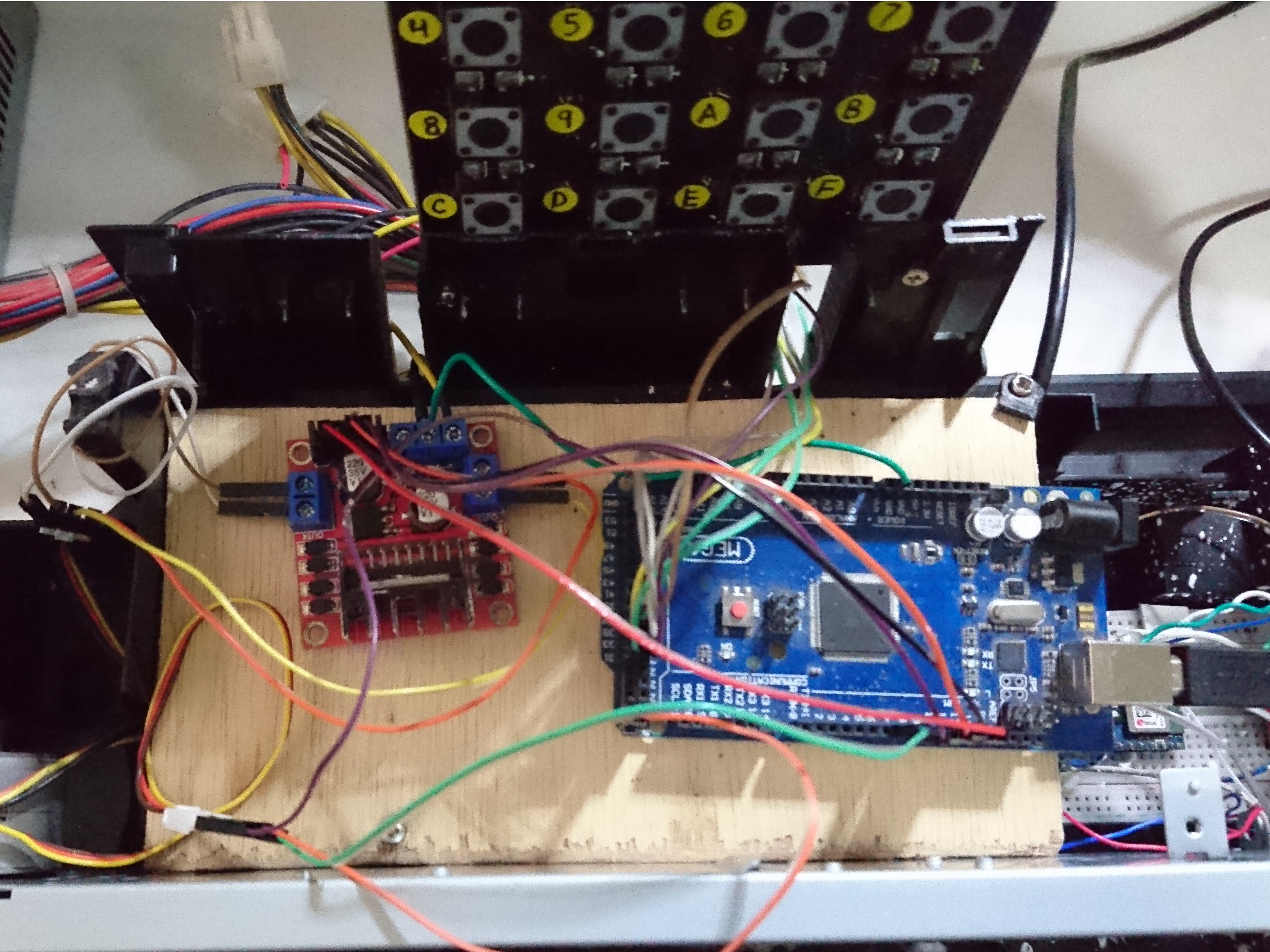
The punch mechanism was made with parts from an audio player and aluminum angles.
Below I show you the code:
pottery_machine_ver2.ino
// AUTHOR: GUILLERMO PEREZ GUILLEN
#include <Keypad.h>
#include <Servo.h>
#include <Stepper.h>
#define STEPS 48 //We put the number of steps you need to go around. 48 in our case
// Name of the motor, the number of steps and the control pins
Stepper stepper(STEPS, 8, 9, 10, 11);
Servo myservo;
int pos = 103;
const byte ROWS = 4; //four rows
const byte COLS = 4; //four columns
//define the symbols on the buttons of the keypads
char hexaKeys[ROWS][COLS] = {
{'0','1','2','3'},
{'4','5','6','7'},
{'8','9','A','B'},
{'C','D','E','F'}
};
byte rowPins[ROWS] = {30, 31, 32, 33}; //connect to the row pinouts of the keypad
byte colPins[COLS] = {34, 35, 36, 37}; //connect to the column pinouts of the keypad
//initialize an instance of class NewKeypad
Keypad customKeypad = Keypad( makeKeymap(hexaKeys), rowPins, colPins, ROWS, COLS);
void setup(){
Serial.begin(9600);
myservo.attach(7);
stepper.setSpeed(60); // velocity of the etepper motor at 60 RPM
}
void loop(){
char customKey = customKeypad.getKey();
// go down the servo
if (customKey == 'F'){
Serial.println(customKey);
for (pos = 103; pos <= 140; pos += 1)
{
myservo.write(pos);
delay(15);
}
}
// go up the servo
if (customKey == 'E'){
Serial.println(customKey);
for (pos = 140; pos >= 103; pos -= 1)
{
myservo.write(pos);
delay(15);
}
}
// move the mechanism to the first groove
if (customKey == 'D'){
Serial.println(customKey);
stepper.step(135);
delay(15);
}
// return the mechanism to the origin
if (customKey == 'C'){
Serial.println(customKey);
stepper.step(-135);
delay(15);
}
// move the mechanism to the second groove
if (customKey == 'B'){
Serial.println(customKey);
stepper.step(120);
delay(15);
}
// return the mechanism to the origin
if (customKey == 'A'){
Serial.println(customKey);
stepper.step(-120);
delay(15);
}
// move the mechanism to the third groove
if (customKey == '9'){
Serial.println(customKey);
stepper.step(105);
delay(15);
}
// return the mechanism to the origin
if (customKey == '8'){
Serial.println(customKey);
stepper.step(-105);
delay(15);
}
// move the mechanism to the fourth groove
if (customKey == '7'){
Serial.println(customKey);
stepper.step(90);
delay(15);
}
// return the mechanism to the origin
if (customKey == '6'){
Serial.println(customKey);
stepper.step(-90);
delay(15);
}
}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.