finallyfunctional
finallyfunctionalPlease watch the following video where I explain the concept.
Overview
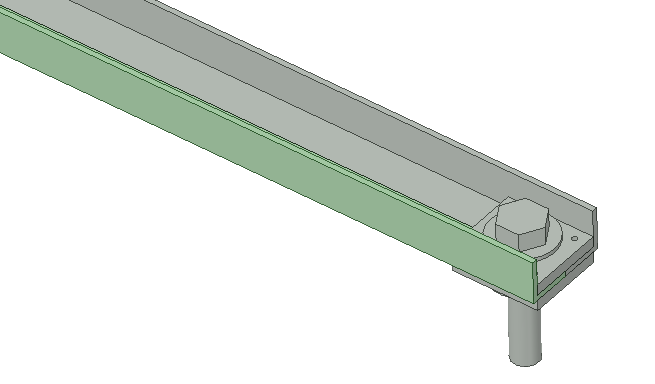
As explained in the video, the idea is that the user walks on two arms that have a wrist joint, to allow the foot pads to rotate, an elbow joint, and a shoulder joint.
The shoulder joints are coupled to a small cylinder directly below the user.
I will most likely add telescoping to the lower segment of the arm, so it can get shorter or longer as needed.
The device should allow for walking forward, backward, at an angle, and strafing. It should be capable of simulating slopes and stairs with some modification. There may be some restriction where the user has to swing his leg in an arcing motion to transition between strafing and walking forward/backward, but I find this acceptable.
The user's foot will be coupled to the food pad via the same mechanism that I show here, here, and here. It is the same mechanism I used with my motorized VR shoes.
Mockup shown in the video
Please note that I did not make the miniature device I quickly made very proportionate to what the actual device well be (oops).
My current platform with the VR shoes is only 42in in diameter, and that has been good for me. So, I'm thinking Each arm will be able to be a maximum of about 20in, which each of the segments being 10in long.
So, with this miniature, the segments are probably disproportionately large and any large swings the segments do probably won't be as bad as it looks here.
Mostly Passive Version
For my first attempt at making this device I will try to minimize the motors I use. As explained in the video I will be using bungees and/or springs that will help the arms always return to their starting position, in the same way, avoiding cases where the arms end up in an unrecoverable position.
The bungees will also provide a little bit of resistance, which is a good thing. I think a little bit of resistance will help it feel more stable.
Of course, later I can motorize everything if I want, especially if I want to simulate slopes and stairs.
Materials and Strength
I'm planning on having this device made almost mostly of steel. I'm thinking of using steel angles, flats, and thrust bearings.
The thrust bearings I have in mind have a load capacity of around 2k pounds.
If I need to use radial bearings I will most likely use these that can handle 800 pounds.
I'll be putting together a test to make sure the joints will be strong enough before build the whole device. For the bottom segment of the arm, especially if it telescopes, I may add supporting wheels that ride along the floor.
Comparison with other devices
As noted in the video, the concept of using robot arms or a track for VR locomotion is not new. Here are some examples.
Just to be clear, I think these other devices are cool. This is constructive criticism, I'm not trying to be mean.
Noise
This device and the ones listed above I suspect are not very noisy. This device could be much quieter than other locomotion devices that are not based on robotic arms or tracks, such as slidemills, active omni-directional treadmills like the Infinadeck, and my own VR shoes.
Change in direction of a large and/or massive object
One of the main reasons I did not attempt to make a device like this in the past is I am not a fan of devices that involve moving or changing the direction of a lot of mass, or large object, very quickly.
I believe that the VR Treadmill - as a disc, Taco VR, and VR space Strider all may suffer from this issue.
For the disc concept, the disc will need to swing back and forth very fast to keep up with a walking pace. For a platform 42in in diameter like I use with my VR shoes, this is a large object that needs to move and change direction quickly.
For Taco VR, the entire device needs to swing back and forth quickly in the same way.
For...
Read more »

 Miroslav Todorov
Miroslav Todorov
 Romain Nith
Romain Nith