Introduction
The vacuum cleaner robot is one of the most useful inventions of the last decade and anyone who says differently means that he does not have one! This fantastic household appliance is a concentration of technology: a complex embedded system composed of some microcontrollers, many sensors, and a lot of… software!

My vacuum cleaner robot.
But how many times do you get the feeling that your robot is stupid?In particular, in situations when your little helper blocks itself over an obstacle like a home carpet, a drying rack, etc. How to recognize this before it’s too late?
A hack to avoid this annoying situation is to calculate the robot’s path in real-time with respect to the floor and perform decisions according to its current position. For instance, if the slope is over 4° degrees, the robot stops itself and goes back.

My vacuum cleaner robot stuck on a carpet.
In this tutorial, I will approach this problem using a data-based technique, Machine Learning, and show how to implement an inclination estimator system based on an accelerometer using an ML model on an Arduino Pro board. To train and deploy this model on a microcontroller, I’ll use Neuton, a TinyML framework that allows to automatically build neural networks without any machine learning experience and embed them into small computing devices.
The microcontroller: Nicla Sense ME
The ML model will be deployed on the Arduino Nicla Sense ME board, a tiny and low-consumption Arduino board with strong computational power. It is based on a 32-bit microcontroller with 4 sensors: motion, magnetometer, pressure, and gas sensor. It is suitable for projects that need to combine sensor measurements and AI tasks on a small device. The perfect match for this experiment!

Arduino Nicla Sense ME.
Nicla is part of the Arduino Pro platform. To get started with Nicla, just use the Arduino IDE and download the “Arduino Mbed OS Nicla Boards” package from the board manager.
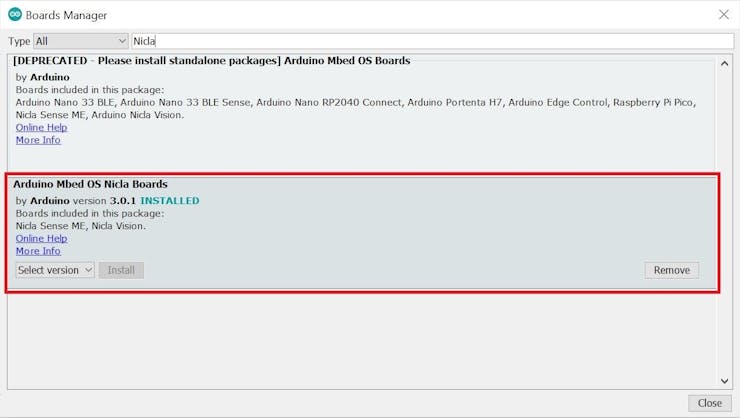
Arduino Mbed OS Nicla Boards package in Boards Manager.
Connect the Arduino board to your computer using a USB cable and… done! Your board is ready to communicate with the IDE.
Before “getting your hands dirty” with Machine Learning, check if Nicla works correctly: open the “Nicla_Blink” sketch inside “Nicla_Sense_System” examples and upload it. The LED mounted on your Nicla will start to blink green.
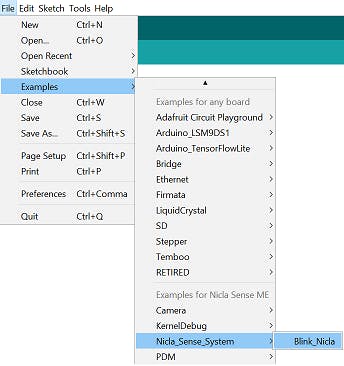
Nicla_Sense_System examples.
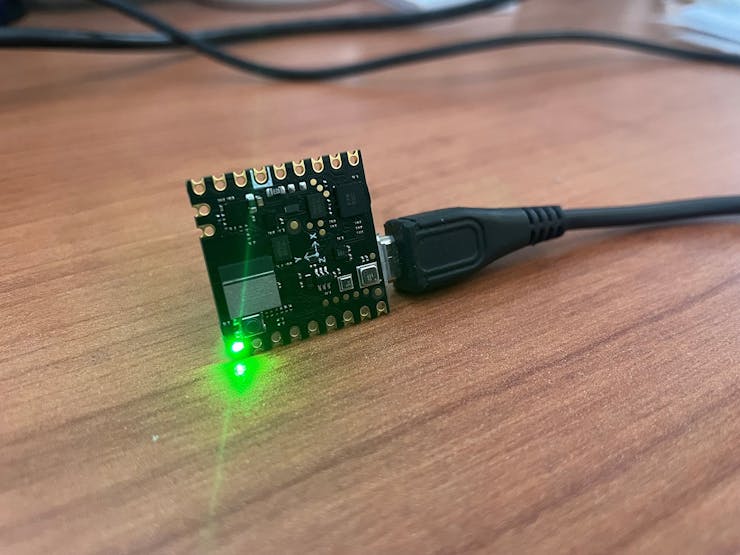
Blink_Nicla sketch runs on Arduino Nicla Sense ME.
Accelerometer measurements will be performed by the Bosch BHI260AP: a 6-axis IMU sensor mounted on Nicla.To verify that all Nicla sensors are working correctly, download “Arduino_BHY2” library from the library manager and open the “Standalone” example.
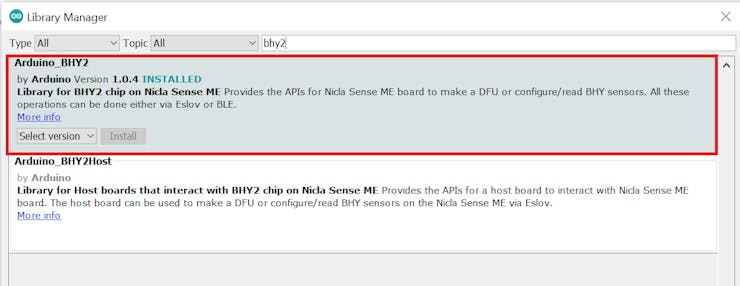
Arduino_BHY2 library.
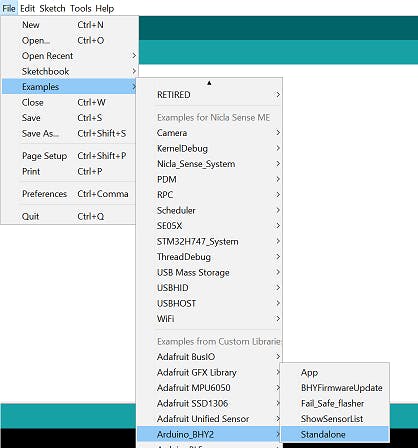
Arduino_BHY2 examples.
Upload this example on the Arduino board and see the results on the Serial plotter. This sketch configures and reads all sensors data (acceleration, temperature, gas, etc…).
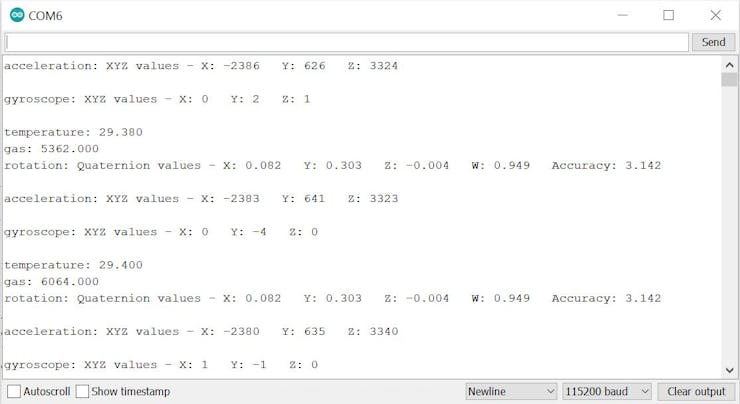
Arduino_BHY2 — Standalone example.
Now, the Nicla is really ready!
Model building
The system is designed to estimate inclination only along one axis and the slope value is expressed in degrees within the [0°; 5°] range.The model takes as input a dataset composed of 50 acceleration and 50 gyroscope measures sampled in a 1-second time window (Sampling time: 20ms — 50Hz).
In the Machine Learning context, this task can be approached in two ways:
- Regression: is the problem to predict a continuous numeric value. The model calculates the inclination as a continuous value between 0° and 5° (e.g., 2.54°).
- Multiclass classification: is the problem of classifying inputs into one of three or more...

 alex.miller
alex.miller
 Stefan Blattmann
Stefan Blattmann