 Upkie Zero
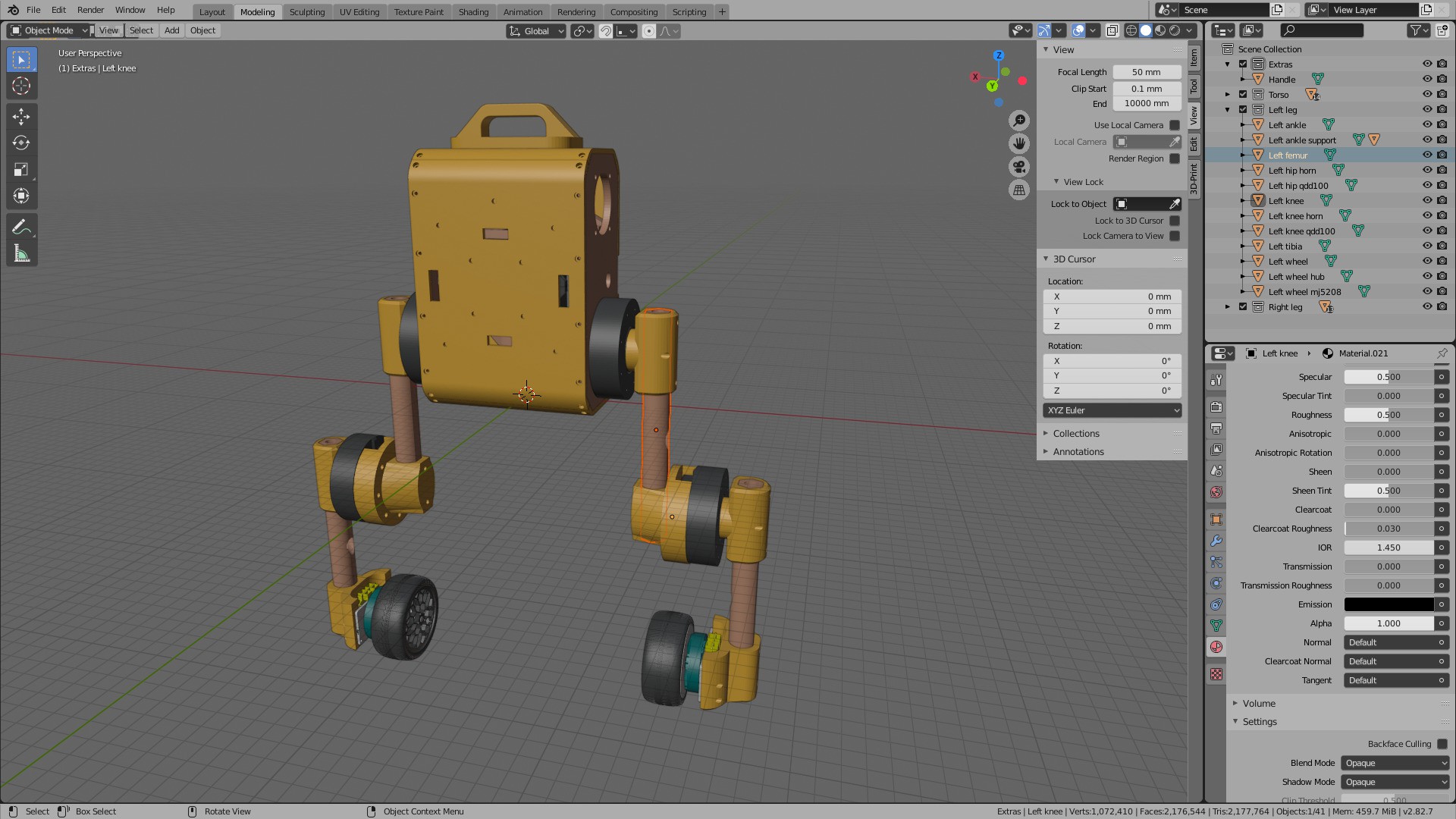
Upkie ZeroTo build a new Upkie from scratch, expect to spend around $3,000 in components, 60+ hours in 3D printing, and more hours of your work assembling and testing the beast. Check out the step-by-step build instructions for details, and head over to GitHub for community support on both hardware and software.
0%
0%
Upkie wheeled biped robots
Wheeled biped robots that can balance, go around and more. Upkies are fully open source, both hardware and software.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











 jdelbe
jdelbe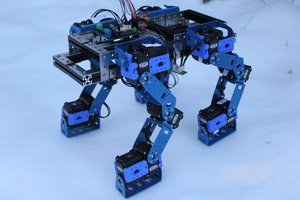
 Dimitris Xydas
Dimitris Xydas
 ThunderSqueak
ThunderSqueak
 Kevin Harrington
Kevin Harrington
hello,Can it achieve biped walking in the future?