 Pavel Surynek
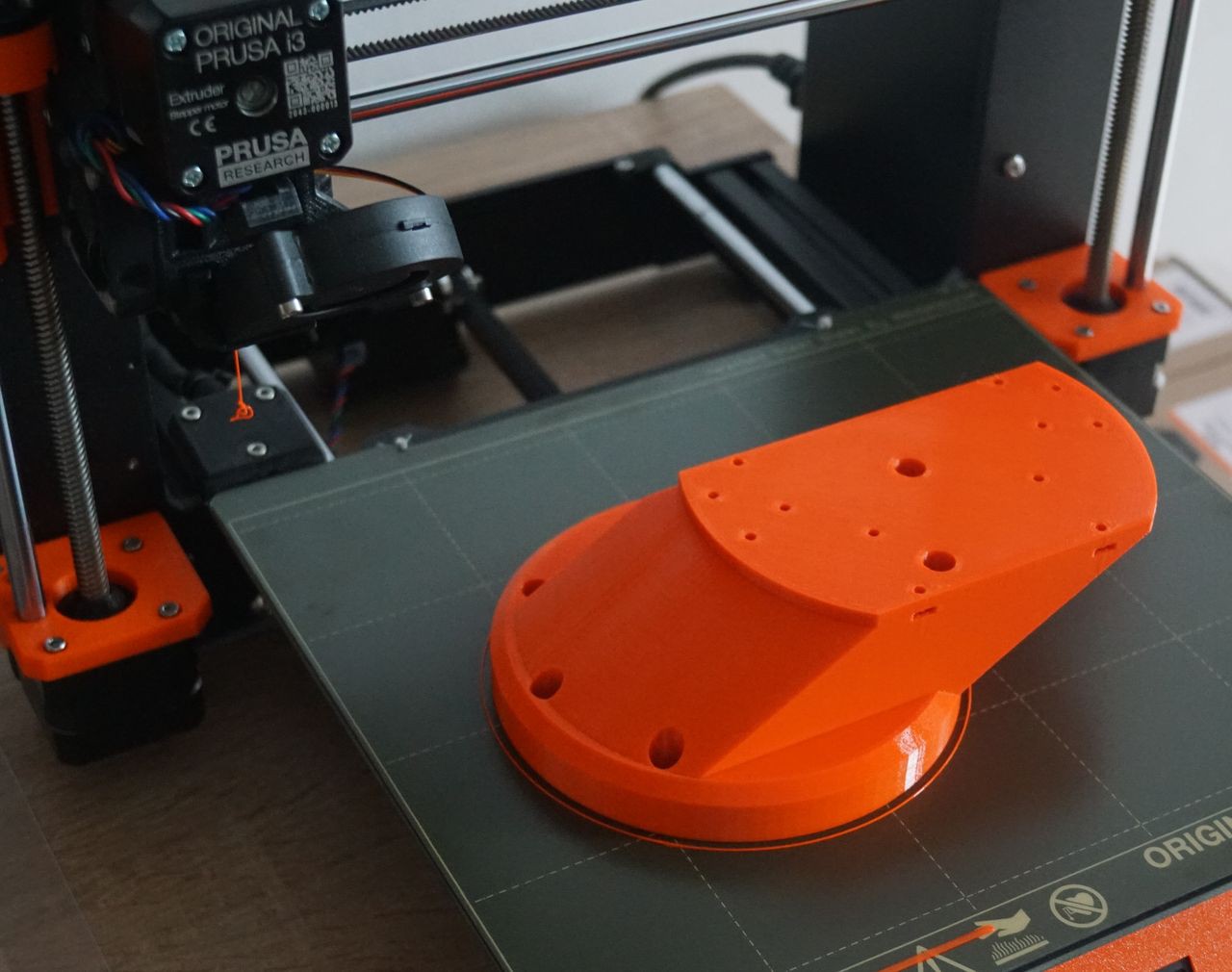
Pavel SurynekThe rev. 2 will not have the arm mounted in the center of the base. The arm will shifted a bit forward which will make the RR1 arm look more like professional robotic arms. The figure shows the part on which the arm will be mounted, this part sits on the base that changes only little from rev. 1. The reason why the arm will be shifted forward is not only visual but most importantly it improves the reach of the arm and makes the working space more natural.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.