 EK
EKThe prototype electronics have been installed into the hull for a test fit. The diver would have the LCD with a RGB backlight in view as they are diving.
Back view:
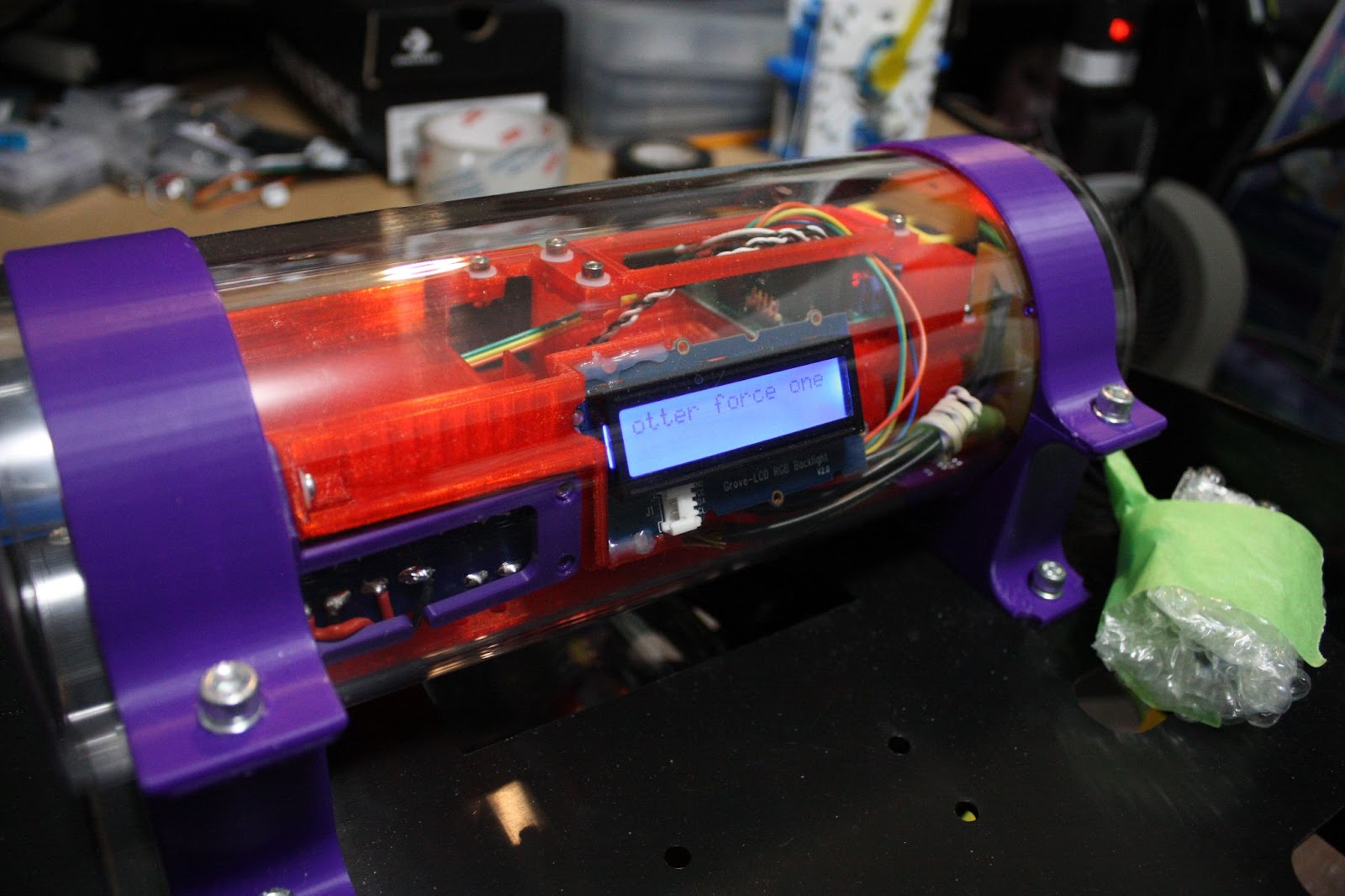
To the side, the bubble wrap is covering a MS5837 pressure and temperature sensor. This will penetrate the hull and be located on the exterior. The corresponding depth value can be displayed on the LCD.
Front view:

The front is where the camera and LEDs will be mounted. The camera connects to the Raspberry Pi, running the Tensorflow Lite model trained for urchins to run object detection live.
Here is a look at the electronics as they were a work in progress.
Testing the sensor:

Back of the proto board:

Structure assembled and with electronics running:

Top view:
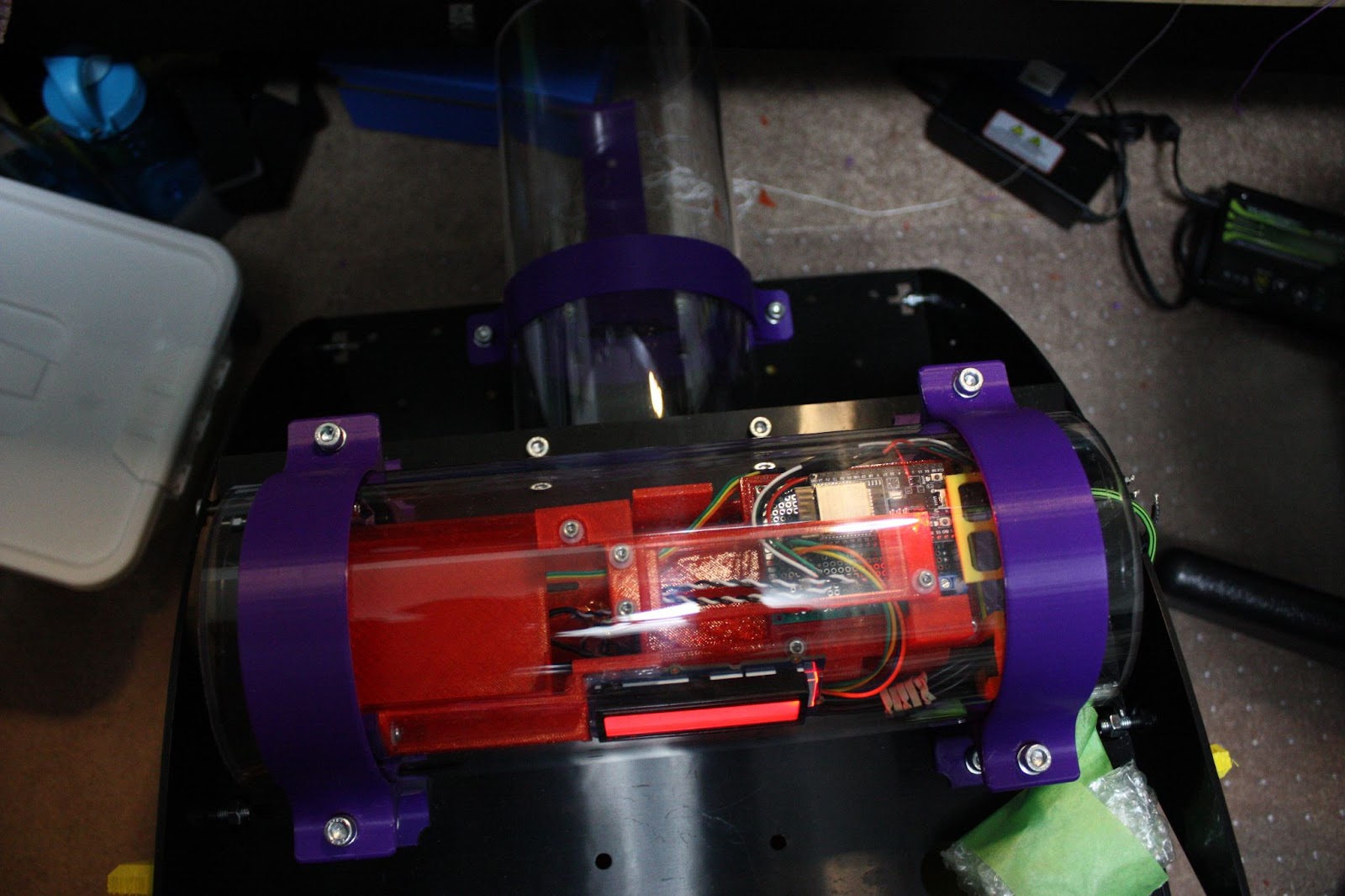
The top view shows the packing of the 3D printed structure and electronics inside. There are still more components to be added, such as the microcontroller 1S Li-Ion battery, the 4S Li-Po battery, the Raspberry Pi, and some additional peripherals.
Compared to the CAD model, there were only a few as-built modifications where fastener heads were protruding more than anticipated.
Front view:
This shows the LEDs, camera, voltage regulator, and 4S battery

Back view:
This shows the LCD, the power input distribution board, and the ESP32 microcontroller board in the background

The next step is to continue with firmware development for all the peripherals, such as the sensors and thrusters.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.