 Seth Fleming-Alho
Seth Fleming-Alho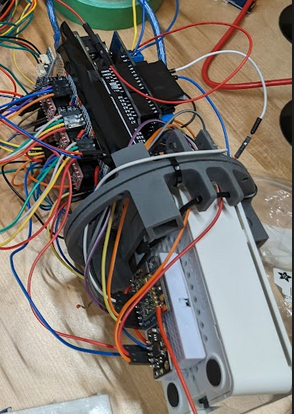 The original plan was to use an Arduino for full control of the glider. Cellular communication could be established while on the surface and dead reckoning would be used subsurface. For prototyping purposes we opted to use long range radio control. We also wanted the ability to reprogram the glider quickly and without needing cables so it was decided that a raspberry pi would be included in the design. The Pi is used to control the Arduino and reprogram it on the fly through WiFi, this saves us from needing to open the glider for every adjustment. We also wanted the ability to power off any actuators while reprogramming to avoid any accidental damage so a second power supply was added purely to support the raspberry pi in the form of a portable phone charger.
The original plan was to use an Arduino for full control of the glider. Cellular communication could be established while on the surface and dead reckoning would be used subsurface. For prototyping purposes we opted to use long range radio control. We also wanted the ability to reprogram the glider quickly and without needing cables so it was decided that a raspberry pi would be included in the design. The Pi is used to control the Arduino and reprogram it on the fly through WiFi, this saves us from needing to open the glider for every adjustment. We also wanted the ability to power off any actuators while reprogramming to avoid any accidental damage so a second power supply was added purely to support the raspberry pi in the form of a portable phone charger.The Brains of the Glider
A project log for Open-Source Shallow Water Glider
With support from Fisheries and Oceans Canada as a part of a co-op work term
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.