 Seth Fleming-Alho
Seth Fleming-AlhoThe .stl files from https://hackaday.io/project/20458-osug-open-source-underwater-glider originally call for a stepper motor and planetary gear setup (figure 1) in order to control the roll of the glider and to be able to steer. We had challenges getting a planetary gear setup working so a change was made to use a high toque metal servo (figure 2) that was mechanically more simple, easier to program and didn't require limit switches.
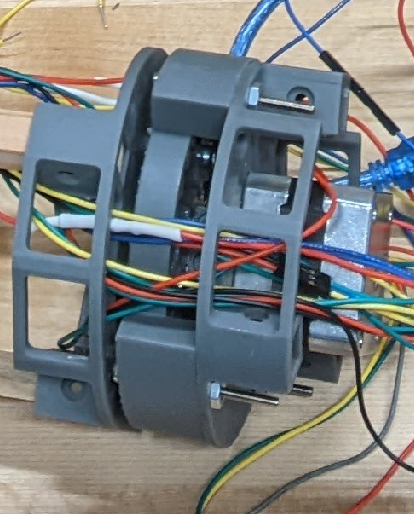 Figure 1
Figure 1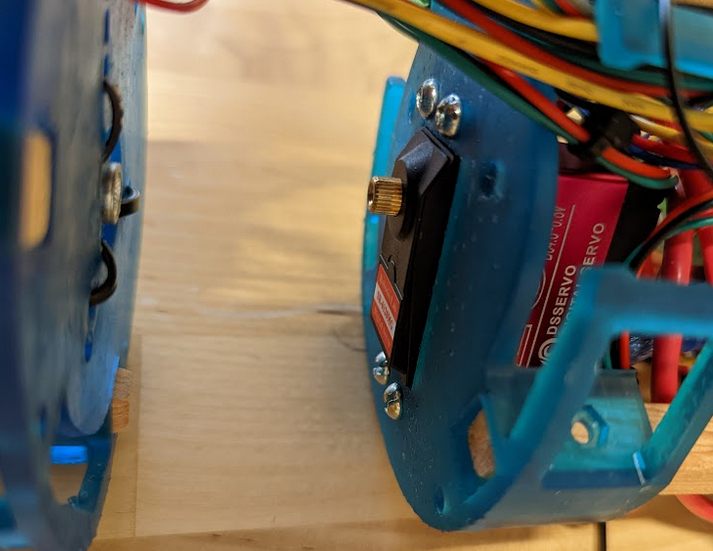 Figure 2
Figure 2The main remaining issue is keeping the coupling from accidentally separating during pitch-motor movement.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.