The gearing was difficult to source as hypoid gears in the size I needed are hard to find. I finally found a source in cheap open face fishing reals. They required some heavy modification but cost $30 instead of the $250 I was quoted for custom made ones.
The driven gears were modified by removing the centers and press fitting some 11mm filament drives into them. The drives were drilled open on each side, leaving a thin ring in the center. The enlarged center allowed the use of two 8X5mm bearings and enough extra room for a modified shoulder bolt.
The bolt head was ground down to fit inside the gear and a slot was added so I could use a screw drive to tighten it.
The motor is a NEMA 11 hollow shaft from RobotDigg. It was necessary to modify the shaft by removing the threaded end and cleaning the hollow out to 5mm.
The drive gear was bored out to 5mm and cut down to the correct size. The gear was mounted onto the end of a 5X3mm stainless Tube. The other end of the tube was threaded to accept two nuts. A 3X2mm PTFE Tube was inserted into the stainless tube and the end of the stainless was rolled in to capture it in place.
The tube and gear where attached to the motor by passing it through the hollow and using two nuts to hold it in place. If I make another iteration of this I would probably just use some thread lock to permanently affix this.
The frame is the only part that I used a mill to make. I think it would have been possible to make it by hand but I was presented with an opportunity to use one for a short period so I knocked this part out quickly. All of the other work on this was done with hand tools only.
The rest of the part were simply traced out on aluminum then cut and formed. The fins were also done with a hacksaw, which should be pretty apparent from the image.
The CAD model has been modified after the prototype in order to move both gear levers to the same side of the extruder. The prototype has each lever coming out of different sides and this ended up being harder to spring load and to operate when loading the filament. I think that I will also need to add some type of adjustable stop to the lever arms as this design allows the filament gears to contact the drive gear when the filament is removed.
The frame was designed to accept standard E6 style heater components but I am using a titanium heat break with a copper block and silicon sock.
I can expand this post with more details and instructions if there is enough interest.


 dekutree64
dekutree64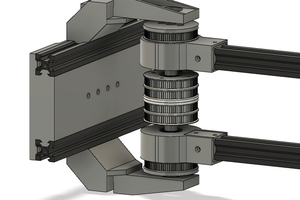
 wschneider
wschneider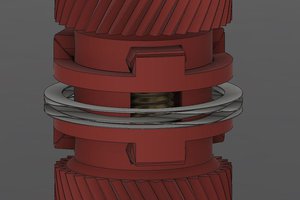
 ReidDye
ReidDye