 haroldmoore016
haroldmoore016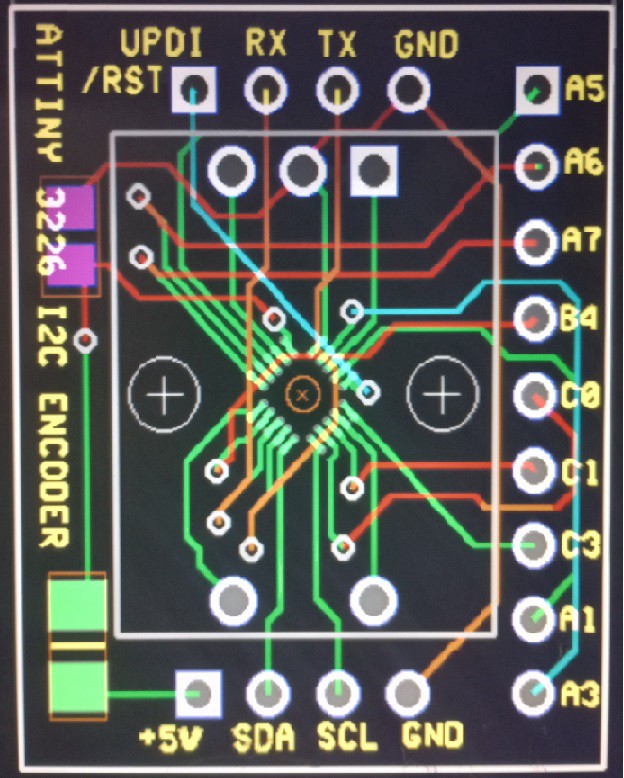
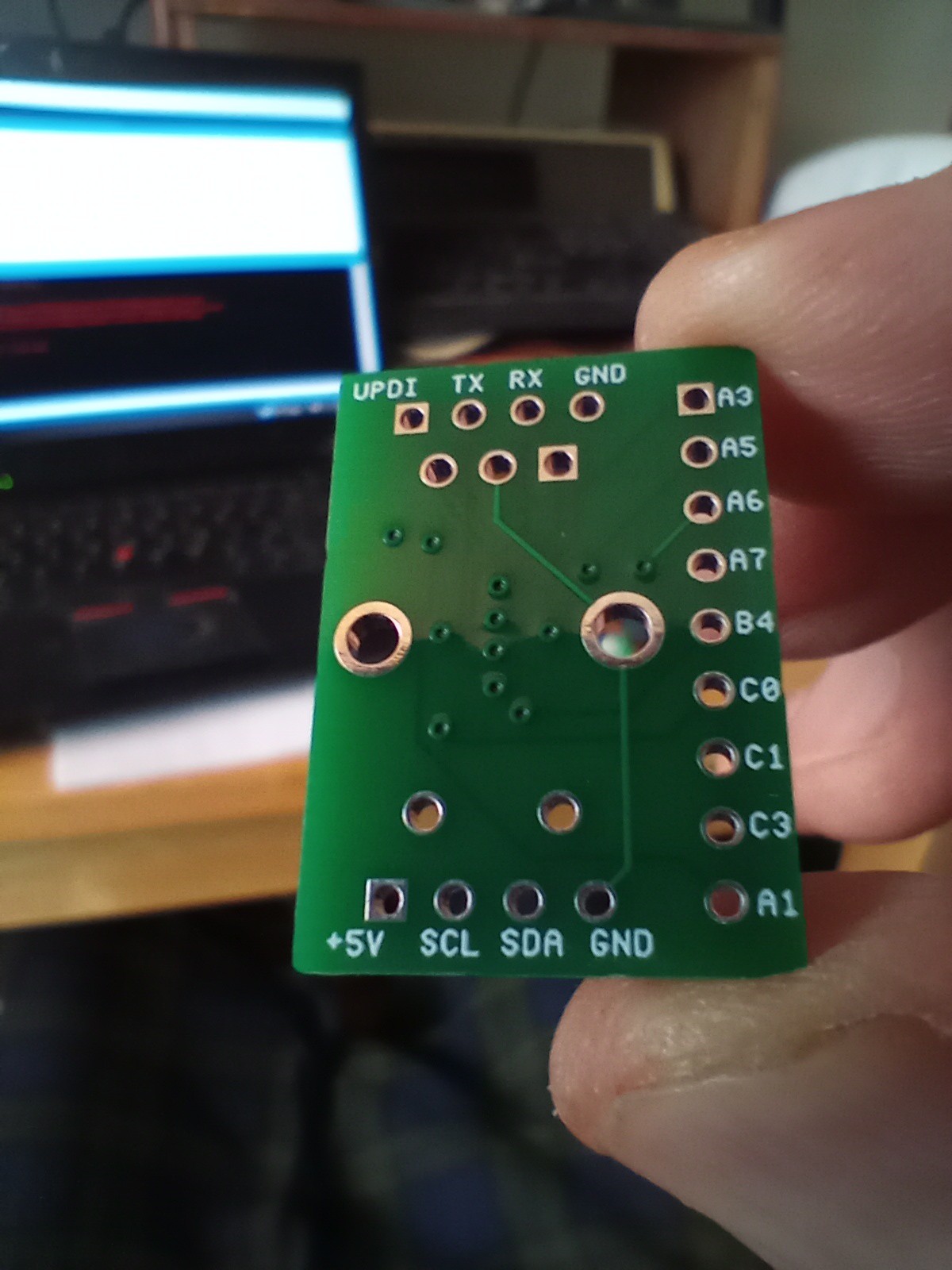
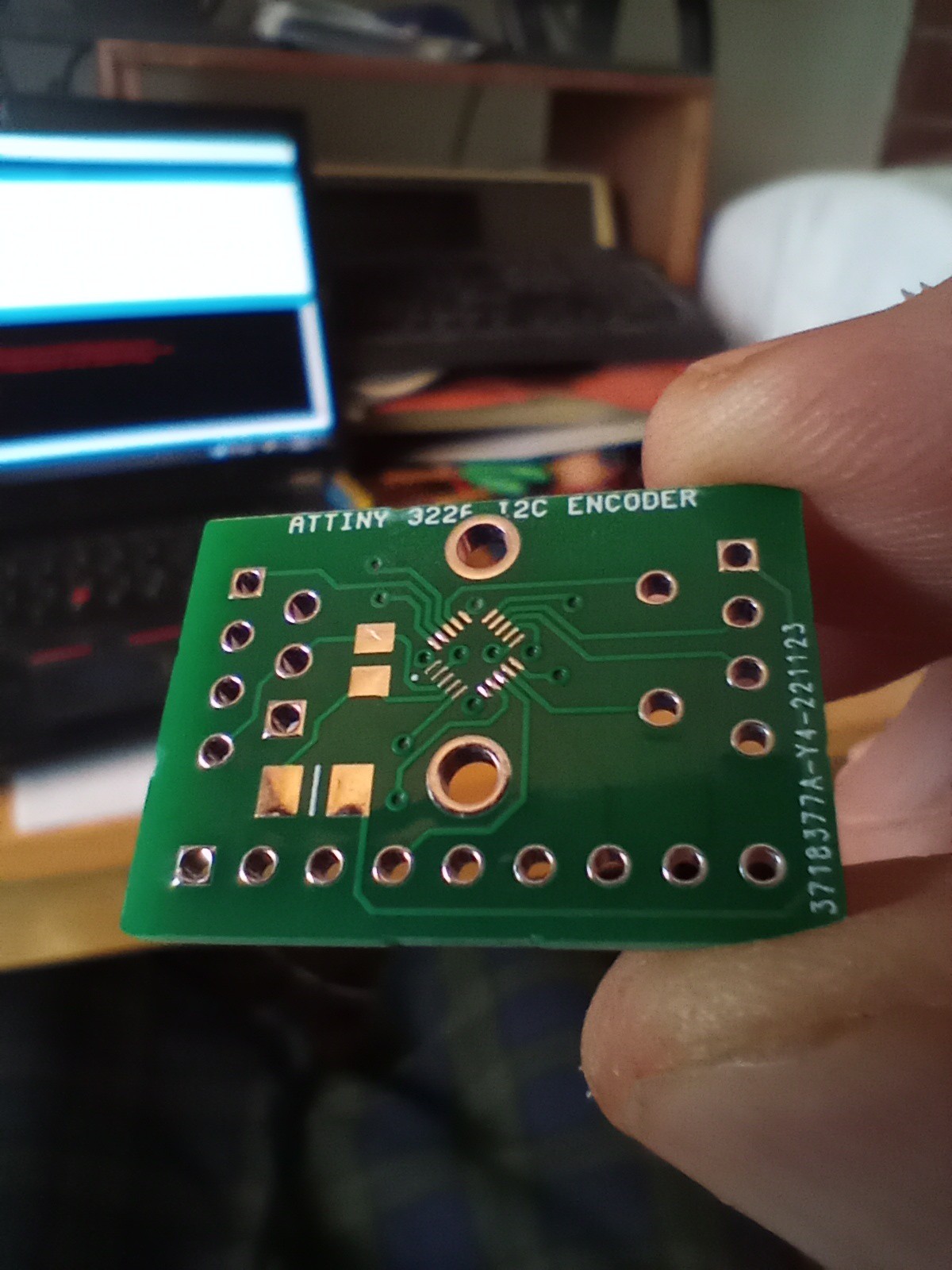
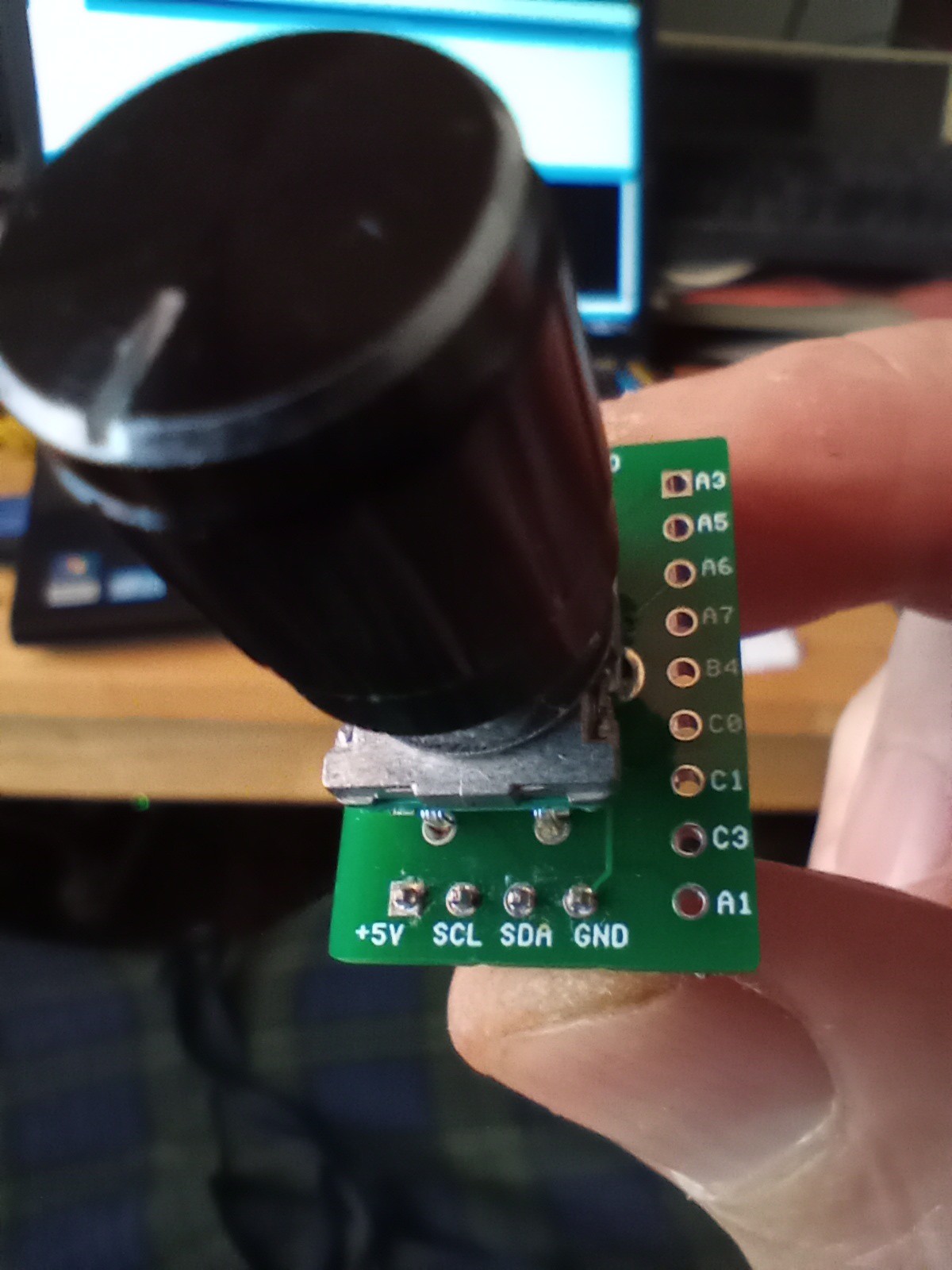
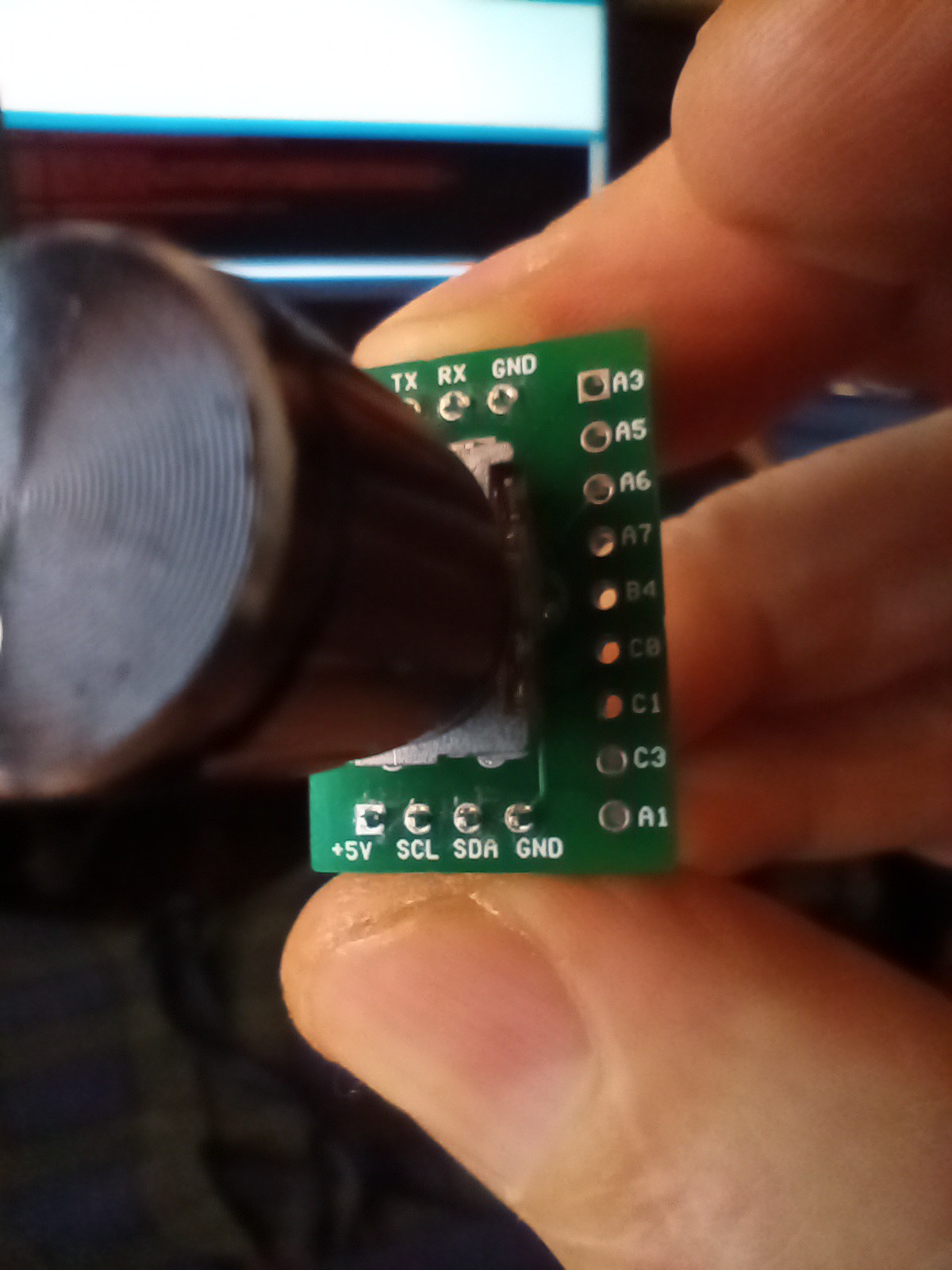
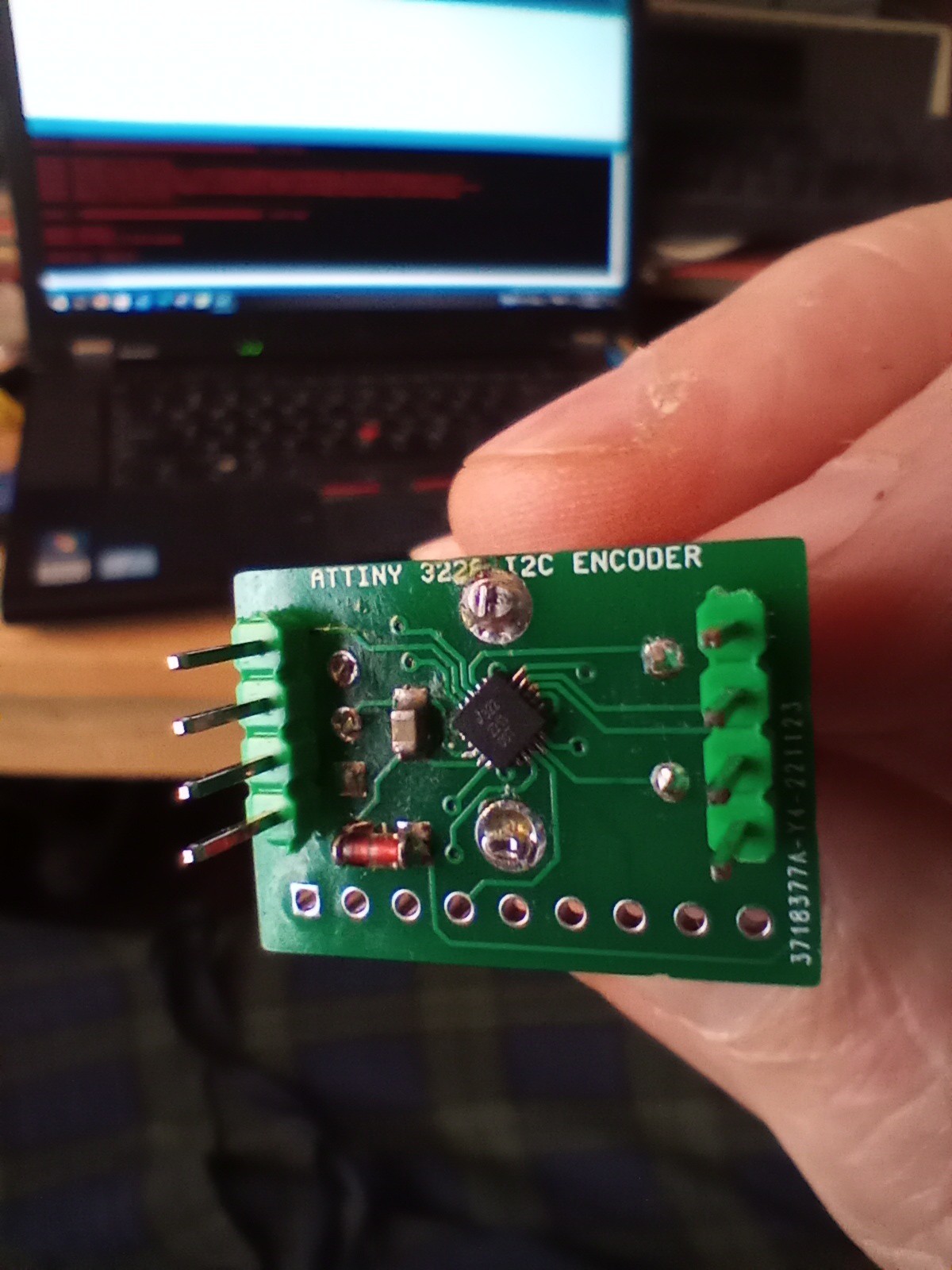
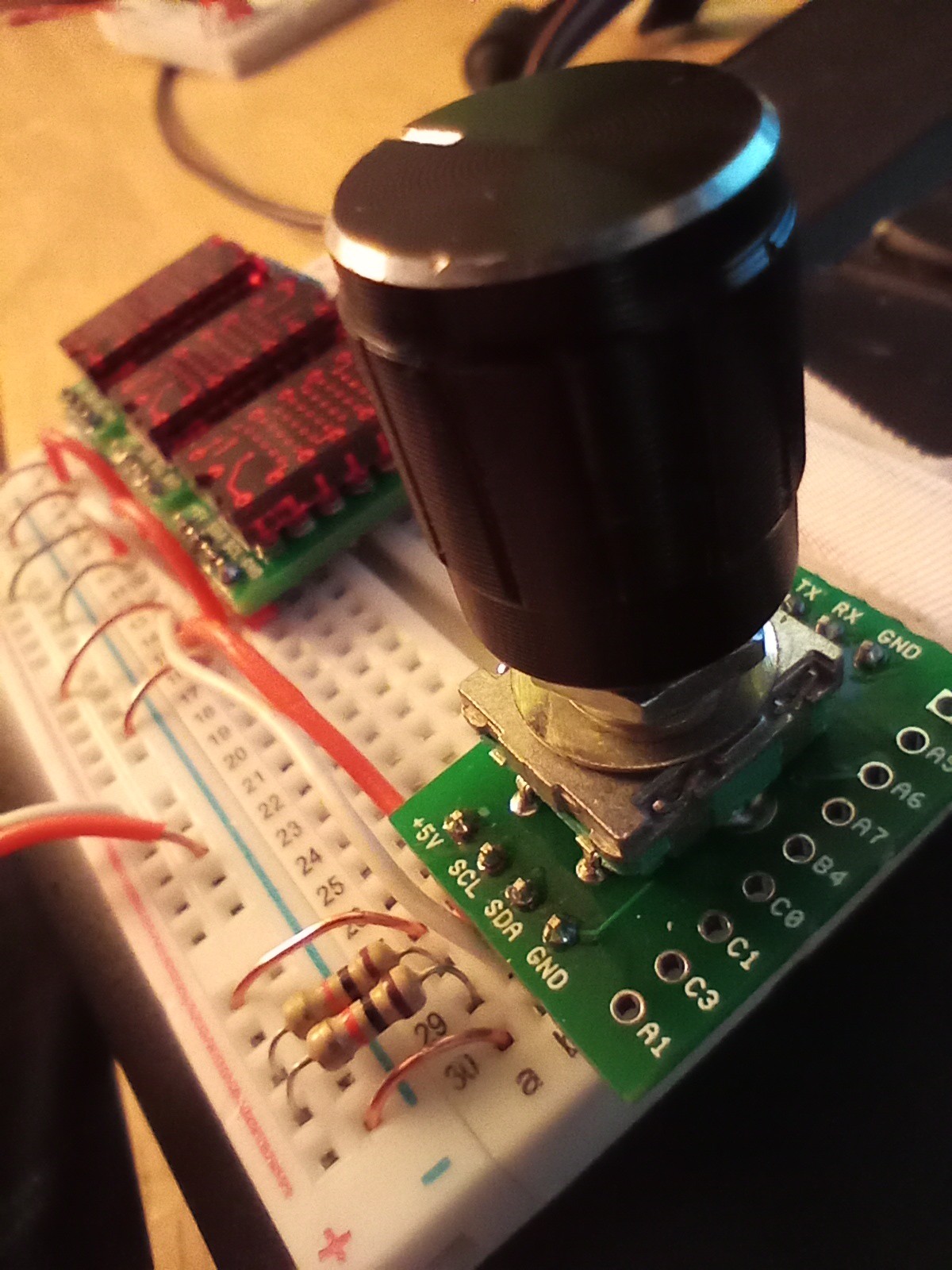
Finally finished with the encoder board, here are some pictures:
Here is a video of going thru the RED, GREEN, BLUE, and WHITE settings for SK6812 LED array:
getting the retro matrix displays working with the new encoder pcb, whew! what a job! ok, back to the new matrix display pcb with 0202 leds !
The new encoder pcb has a lot of I/O available!
Here is the completed code and hardware updates to use for controlling stuff:
Here is a video of the encoder pcb with seven WS2812B LEDs :
using FOUR matrix displays:
Code on github ---> https://github.com/haroldmoore/RotoMan
:-)
More variations on a theme.....


 Gorloth
Gorloth

 Dimitar
Dimitar
 Saimon
Saimon
wish the files in the files section were removeable, real old stuff, I will update with a github link the files that are newest and more appropriate!