BleakyTex
BleakyTex-
Firmware update and future plans
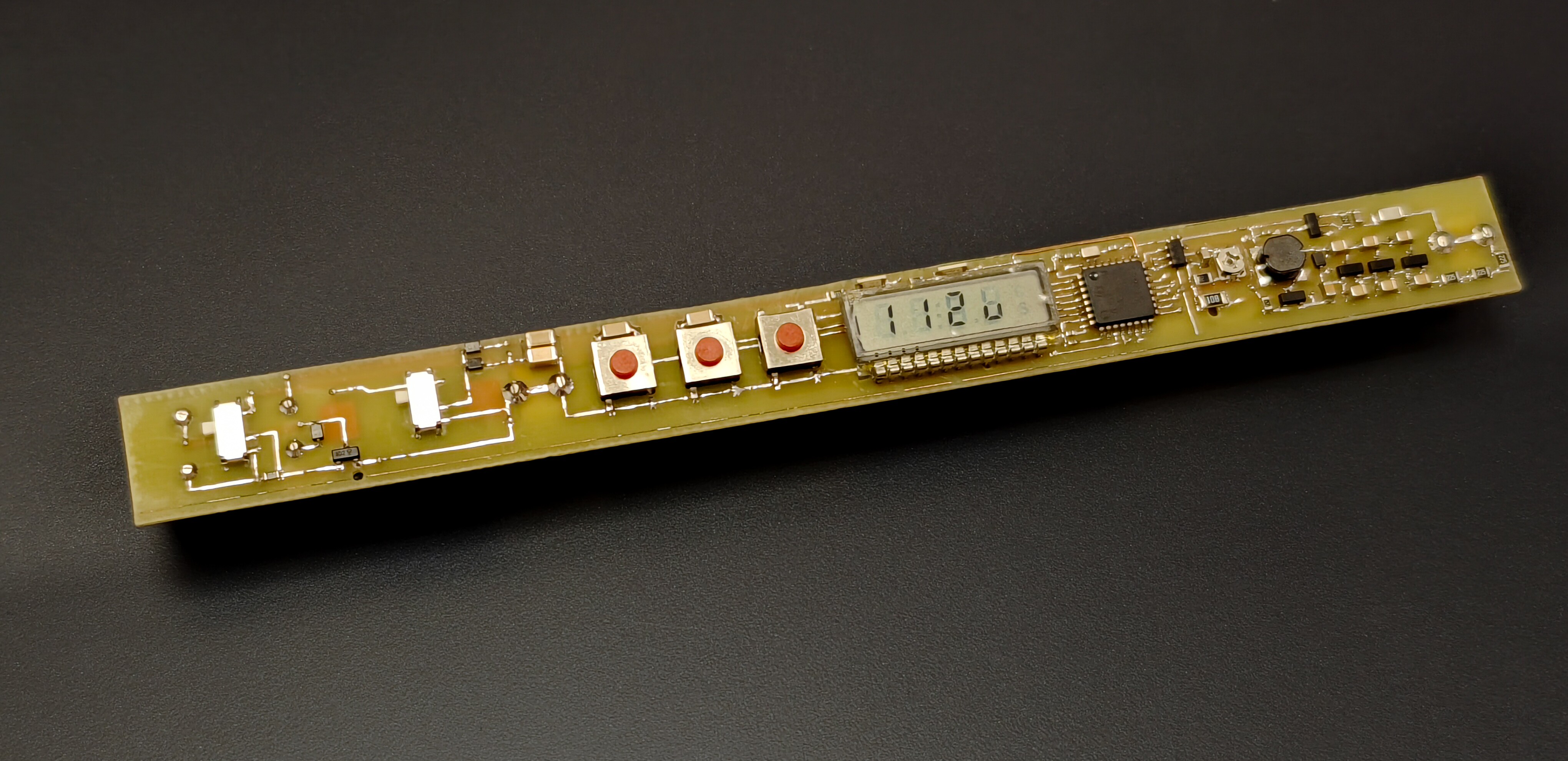
03/20/2023 at 16:54 • 0 commentsI am finally able to post the firmware, it has been rewritten in full assembly and executes from RAM. As I expected, the device now consumes around 17-18 uA which means around 11 months of battery life, maybe even 12, since the previous firmware version lasted for 5 months instead of expected 4 months. However, I'm starting to have bigger plans for it. I realized that there is a lot of unused flash memory that can be used to log radioactivity data and display it via PC interface. Also check the drawing of a custom LCD that the final version may get:
![]()
There also will be a major update to the HV booster to get as much efficiency as possible with this form factor but it requires a custom transformer, and it will take some time to design and make. Two years of battery life is the new goal!
-
A small update
01/27/2023 at 19:18 • 0 commentsIt's been 4 months and this thing is still running fine. The battery voltage is 2.2V, so I'm expecting it to run for another month or two. Also the code has been rewritten in assembly and now executes from RAM, though it still needs some polishing, I'll post the details in the next update. Disabling flash reduced the consumption by 25 uA and now the entire device consumes 19 uA, which means 11 months of battery life. I've also managed to find some better parts which should reduce the PCB size and power consumption even further. My current goal is 1 year of non-stop operation.
-
First prototype
10/11/2022 at 18:22 • 0 commentsIt's working!
There are only two things left to implement — LCD display functions and basic control functionality: sound switch, backlight, buttons for switching display mode and resetting the dose. I don't see much point in explaining how it works, let's get to the results instead. The total current consumption when counter is idling is 44 µA, which is low enough to avoid the battery capacitance derating. Given that the speaker is disabled, and battery capacitance is 150 mAh (the device stops working at 1.8V, so we can have individual cells discharged to 0.9V, utilizing their full capacity), this gives us a total working time of 3409 hours or 142 days or 4.7 months. This is a best-case number, so I've rounded it up to 4 months. I've left the device turned-on and will post the actual number of days it managed to last. At the moment of writing this, it has been working for 12 days non-stop without any problem and the battery loses around 8mV per day.
I'm happy with the code performance too. The whole update routine (radiation rate, dose calculations, time update and LCD print function) takes only 16 ms or 524 clock cycles. We save some power because the CPU spends so little time in the active mode. A friend of mine decided to rewrite the firmware in full assembly, optimizing it even further. I will post an update if he will actually do it.
Here's some photos and a video of a finished device. It was designed with an enclosure in mind but apparently, I won't be able to make it any time soon.
![]()
![]()
Source code and schematics are available on my Github.
-
Data processing
10/09/2022 at 00:24 • 0 commentsSetting the update interval
To save power, I've decided to update the display once in 5 seconds. Dose rate is a statistical value, so there's not much point to update it faster. Between updates we can stop the CPU, since the boost converter and the radiation event counter work independently of it. We have one last timer to spare, and we're going to use it to generate CPU wakeup interrupts every 5 seconds. After wakeup, we'll update the dose rate and total dose values and put the CPU back to sleep until the next interrupt. First, we should set up the timer:
/* TIM4 SETUP (5-SEC INTERRUPTS) */ CLK_PCKENR1_bit.PCKEN12 = 1; // Enable TIM4 clock TIM4_PSCR_bit.PSC = 0xE; // Div by 16384 -> 0.5 sec resolution TIM4_ARR = 9; // 5-second period (sec = + 1) / 2) TIM4_EGR_bit.UG = 1; // Update timer registers to apply prescaler value TIM4_CR1_bit.CEN = 1; // Start the timer TIM4_IER_bit.UIE = 1; // Enable TIM4_UIF interrupt (timer overflow) WFE_CR3_bit.TIM4_EV = 1; // TIM4 interrupts can wake the CPU from Wait modeAnd then we just call the update function when the CPU is woken up by interrupt from TIM4 and then put it back into Wait mode after the function is executed:
int main(void) { ... FLASH_CR1_bit.WAITM = 1; // Disable Flash memory during Wait mode while(1) { if (TIM4_SR1_bit.UIF == 1) { TIM4_SR1_bit.UIF = 0; // Reset interrupt flag app_readGeiger(); } asm("WFE"); // Enter Wait mode } }Notice that this happens in the main loop, there is no interrupt handler. Since there's nothing time-critical happening here, we don't need them, we'll just waste precious CPU cycles to enter and exit an interrupt.
Reading the event counter and applying dead-time correction
The challenge with reading the value from the timer is that the event may occur during reading process, causing rollover or missed readings. Also, we should apply dead-time correction to the value we've read because at high counting rates, a Geiger tube may not have enough time to recover to register pulses occurring at quick succession, which leads to reduced measured activity. The equation for the dead-time correction is:
where N — true counting rate (in events per second), n — measured counting rate, Td — dead time of the tube. This equation is meant for 1-sec measurement intervals, and we're measuring with 5-sec intervals. This will reduce the dead-time effect by 5. The dead time of SBM-20 tube is 190µS, so the effective dead time will be 190/5 = 38µS:
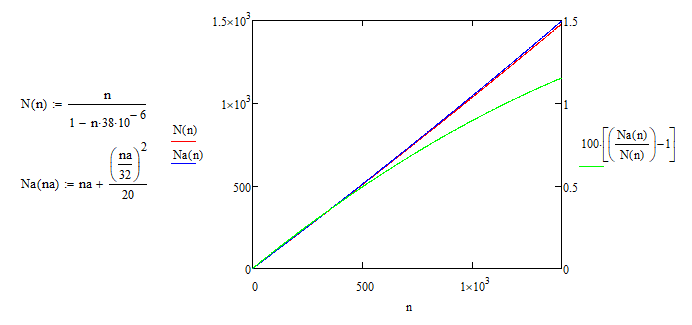
This equation involves floating-point numbers and will be too challenging to calculate for an 8-bit microcontroller, running at 32.768 kHz. We can simplify it with a polynomial approximation:
Now we can calculate N only using integer numbers. Before we get to coding, let's see how accurate our approximation is. For this, I'll plot the original equation and its approximation for n = 0 to 1400 CPS, which is the maximum counting rate for SBM-20.
![]()
Red line — original equation, Blue line — approximation, Green line — deviation in % The deviation increases with n, and at 1400 CPS the approximation gives a value, that's 1.15% higher than the original equation gives. Not too much accuracy to lose, given a massive performance gain that we get from this approximation, isn't it? Let's write the code. Since we need to read and clear the timer as fast as possible, I'll use assembly to do this. And while I'm at it, I'll do the dead time correction in assembly as well. You can check the STM8 programming reference (PM0044) if something isn't clear.
uint16_t cp5s; // Registered events during 5-sec interval void app_readGeiger(void) { // Read and clear TIM3 counter // TIM3_CNTRH must be read first to prevent rollover asm("LD A, TIM3_CNTRH"); asm("CLR TIM3_CNTRH"); asm("PUSH TIM3_CNTRL"); asm("CLR TIM3_CNTRL"); asm("PUSH A"); asm("LDW X, (0x01, SP)"); // now both stack and register X hold cp5s value // Apply dead time correction: cp5s = cp5s + ((cp5s/32)^2 / 20) // This equation is a polynomial approximation of N = n / (1 - n*38e-6) asm("LD A, #32"); asm("DIV X, A"); // cp5s/32 asm("LD A, XL"); asm("MUL X, A"); // ^2 asm("LD A, #20"); asm("DIV X, A"); // /20 asm("ADDW X, (0x01, SP)"); // + cp5s asm("POPW Y"); asm("LDW cp5s, X"); // cp5s = }Only 15 instructions, not too bad. The rollover is prevented by using the fact that the MCU locks the timer counter value if we first read the TIM3_CNTRH register and unlocks it after TIM3_CNTRL is read. Thus, our timer ignores radiation events for only 4 instructions (CPU cycles) every 5 seconds.
Calculating radiation dose rate
Dose rate is a statistical value, and a 5-sec interval is not enough to get a reasonably accurate measurement. A reasonable trade-off between accuracy and response time is a 1-min measurement. But how to update the display every 5 seconds if our measurement interval is 1 minute? One way to calculate counts-per-minute (CPM) is from a rolling sum of 12 consecutive 5-sec measurements. Every 5 seconds a new measurement is added to the sum and 12th last is subtracted from it. Algorithmically it looks like this:
cpm -= event_buf[event_idx]; cpm += cp5s; event_buf[event_idx] = cp5s; ++event_idx; if (event_idx > 11) event_idx = 0;
This way we can update the dose rate value every 5 seconds. After getting the CPM value, we can calculate a dose rate value (µSv/hr) from it by multiplying CPM by a tube-specific coefficient, k = 0.0052 in case of SBM-20 tube:
Floating point numbers again, let's see how we can transform this to only use integers. The maximum dose rate resolution that makes physical sense is 0.01 µSv/hr, so we can keep the dose rate in a form of hundredth parts of µSv/hr: 0.01 = 1, 0.02 = 2 etc. Then we can multiply the coefficient k by 100:
Here dose_rate is an integer variable, and now we can use simple integer operations to find its value.
Now let's talk about precision. Radiation events occur at random, so we should apply statistical rules when evaluating dose rate. Suppose we've measured 0.1 µSv/hr. This is equivalent to n = 20 registered events during 1 minute for SBM-20 tube. Coincidentally, this is where we're starting to get Gaussian probability distribution (n ≥ 20), so we can apply the following equation to estimate measurement precision:
For such a low radiation level, I think this is acceptable. Obviously, as n increases, precision will increase.
Calculating total radiation dose
This dosimeter is designed to measure radiation dose up to 999 mSv. This is a lot of radiation events to keep in memory and the math will get ugly very fast if we don't simplify it (for the microcontroller, not for us). To find the accumulated radiation dose from total number of counted events, we can transform the equation for µSv/hr:
where N - counts per µSv. Number 60 comes from the number of minutes in 1 hour. The formula is for µSv per hour, but the coefficient is for counts per minute. And yes, we need this much precision to get an accurate result on the whole span of possible dose values, so obviously, we need to come up with a fast algorithm to update the dose. Here's what I came up with.
We can have multiple display modes and update the displayed number every time the event counter reaches certain value. Then we subtract this value from the counter. The maximum counting rate for SBM-20 is 1400 CPS, which will give us maximum cp5s = 1400 ⋅ 5 = 7000 events. This is equal to 0.6 µSv dose, so it's more convenient to handle first two display modes separately, because the dose value in them can increase by more than 1 between display updates.
uint8_t mode uint16_t dd int32_t dose int32_t LUT[] Display mode Display format Resolution Events per 1 digit Algorithm 0 9.99 µSv 0.01 µSv 115 dd += 10*(dose / 1153); dose %= 1153; dd += dose / 115; dose %= 115; if (dd > 999) { ++mode; dose += (dd % 1000) * 115; }1 99.9 µSv 0.1 µSv 1153 dd += 10*(dose / 1153); dose %= 1153; if (dd > 999) { ++mode; dose += (dd % 1000) * 1153; }2 999 µSv 1 µSv 11538 if (dose >= LUT[mode]) { ++dd; dose -= LUT[mode]; if (dd > 999) ++mode; }3 9.99 mSv 0.01 mSv 115384 same as 2 4 99.9 mSv 0.1 mSv 1153846 same as 2 5 999 mSv 1 mSv 11538461 same as 2 I've provided very simplified code; the actual code is very ugly because it's heavily optimized for speed, I don't see the point in posting it here. The code executes in 6.2ms on average, which is equal to 203 clock cycles. If implemented in assembly, it can be optimized to only 122 cycles. And now think how long it would take to divide a 64-bit integer (total counted events) by 11538.4615. I won't be surprised if over a 1000 cycles.
Saving data
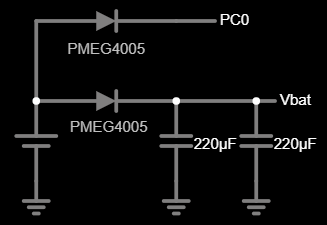
I want the dosimeter to keep the radiation dose and dose measurement time when it's switched off. First of all, we need means to detect power loss. Since I couldn't get a proper voltage monitor, I came up with this:
![]()
When power is lost, the voltage at MCU's pin PC0 goes to 0, triggering the shutdown sequence. The power for shutdown is provided by the capacitors. The upper diode is only for reverse polarity protection, bottom diode also prevents current from flowing from the capacitors to PC0.
Now let's save the data to EEPROM. Its access granularity is 4 bytes, so it's rational to have a data structure with a size, multiple to 4 bytes. We need to save the total accumulated dose and total measurement time: seconds, minutes, hours and days (up to 999). I've managed to cram the data into an 8-byte structure by removing the redundant bits in variables that we need to save:
struct { uint16_t ddisp:10; // displayed digits of dose, 0..999 uint16_t min:6; // dose measurement minutes, 0..59 uint16_t mode:3; // dose display mode, 0..6 uint16_t hrs:5; // dose measurement hours, 0..23 uint16_t dose_h:8; uint16_t dose_l:16; // radiation events counter, 0..11538461 uint16_t days:10; // dose measurement days, 0..999 uint16_t sec:6; // dose measurement seconds, 0..59 }state;Notice that the bit order is such that the structure can be split into 4 bytes during write operation. During shutdown, the data is packed into this structure and written to EEPROM, and then unpacked during startup and the value of respective variables is restored.
-
Counting radiation events
10/07/2022 at 01:49 • 0 commentsReading signals from a Geiger tube
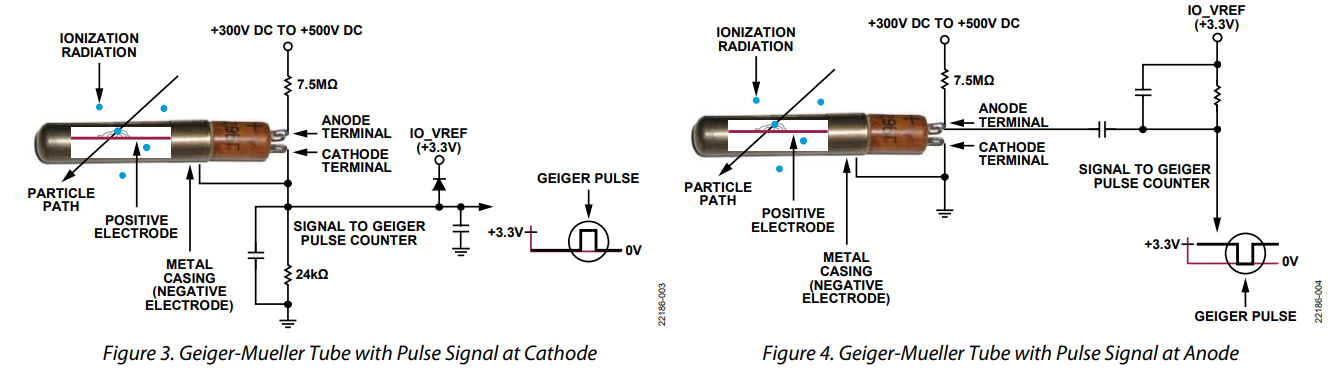
There are two ways to read the signal — from the anode and from the cathode of the tube:
![]()
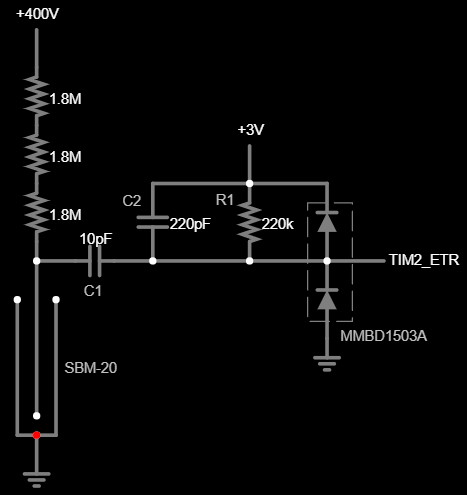
Two types of Geiger tube readout circuits (source: CN-0536 by Analog Devices) I'll be reading signals from the anode because it's more convenient to route the PCB this way and this approach provides more immunity to electrical noise. In case of anode readout, the main goal is to reduce the pulse amplitude, so it doesn't destroy the MCU. The schematic is as follows:
![]()
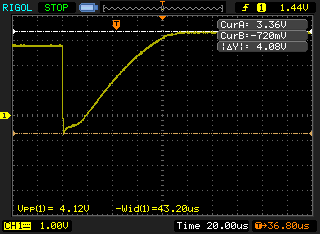
C1 and C2 act as a capacitive divider, attenuating pulse amplitude. C1 must be rated for more than 400V, I'm using a 2kV rated one. R1 is just a pull-up resistor: because the pulse is negative going, the idle voltage level should be high. I am deliberately not using MCU's internal pull-up resistor here because its value is too low, and it will shorten the pulse too much because of that. The diodes are used to clip the pulse amplitude to a safe level. Let's see how the output pulse will look like when a Geiger tube registers a radiation event:
![]()
The output pulse swings from supply to ground with some overshoot due to voltage drop in diodes. High amplitude of the pulse allows us to use a digital input to register it.
Making loud clicks
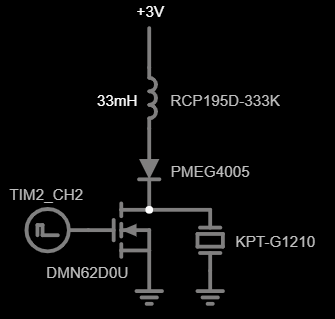
I would like to be able to hear when a radiation event is registered, and I want it loud. There are two types of sound transducers — magnetic and piezoelectric. Magnetic ones require high current, so they're out of the question, also they're not that loud compared to piezoelectric. The problem with piezoelectric transducers is that they require high voltage to produce a loud sound, so we need the means to generate high voltage pulses. Here's what I came up with:
![]()
This circuit works similar to a boost converter. When the transistor is open, the inductor starts building up current and the remaining charge in the transducer is removed to increase voltage swing across it (electrically they behave like capacitors, so they can hold some charge). When the transistor closes, the energy that the inductor had at that time, is transferred into transducer's capacitance and it stays there until the next cycle. I've created a simulation if you want to take a closer look at the circuit's operation.
I'm using a KPT-G1210 transducer, it's rated for 30V, so let's generate voltage somewhere in this vicinity. As I said before, the energy EL held by an inductor is transferred into transducer's capacitance:
where:
- Et — energy, held by transducer's capacitance
- L — inductance value
- IL(pk) — peak inductor current
- Ct — transducer's capacitance
- Vt — voltage that the transducer will build up
From the formula above we get:
where
In this case, Ra is the sum of inductor's series resistance and MOSFET's drain-source resistance. We can control two parameters in this circuit — the inductor value and its charging time tON. I've selected a 33mH inductor to reduce its peak current; LR44 battery has high ESR, so if we pull too much current from it, we may get brownouts at low battery levels. This leaves us only with the tON to figure.
We'll be using a TIM2 timer in the MCU to generate pulses. It has a one-shot mode and an external trigger, so we'll set it to produce a single pulse of fixed length when its trigger input TIM2_ETR detects a falling edge from the Geiger tube. I've added this code to the TIM_Init() function:
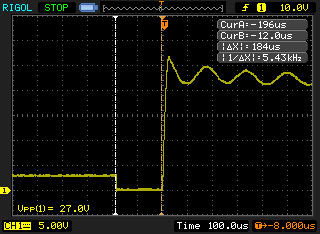
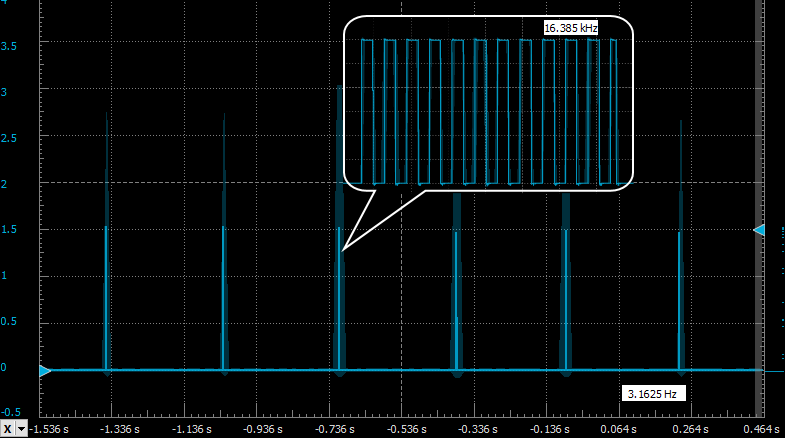
/* TIM2 SETUP (ONE-PULSE MODE, EXT. TRIGGER) */ PB_DDR_bit.DDR2 = 1; // Set PB2 as output (TIM2_CH2) PB_CR1_bit.C12 = 1; // Set PB2 as push-pull CLK_PCKENR1_bit.PCKEN10 = 1; // Enable TIM2 clock TIM2_ARRH = 0; TIM2_ARRL = 6; // Pulse length = 30.52uS * TIM2_ARRL TIM2_CCR2H = 0; TIM2_CCR2L = 1; TIM2_CCMR2_bit.OC2M = 7; // PWM mode 2 TIM2_CR1_bit.OPM = 1; // One-pulse mode TIM2_SMCR_bit.TS = 7; // Trigger source - external TIM2_ETR_bit.ETP = 1; // Trigger on falling edge TIM2_SMCR_bit.SMS = 6; // Start the timer on ext. trigger TIM2_CR2_bit.MMS = 2; // Update event -> trigger output TIM2_CCER1_bit.CC2E = 1; // Enable channel 2 output TIM2_BKR_bit.MOE = 1; // Enable main outputThe length of the pulse that this timer generates, can only be a multiple of its clock period: 1 / 32.768 kHz = 30.52 µS. Let's see what voltage we'll get with a pulse that's 6 clock periods long — 183.1 µS.
Let's see what we'll get in practice.
![]()
Close enough, 27V, and the MCU generates a pulse of correct length as well. The oscillation after the pulse is because the transducer continues to vibrate after making a clicking sound, generating voltage. Now let's hear how the clicks sound like.
Hackaday didn't let me embed a video from Imgur, so here's a link to it. The video shows a completed device but the clicking will work with the code and circuits provided so far.
This is actually quite loud for such a small transducer; I can easily hear the clicks from another room.
Counting radiation events
Just having a clicking dosimeter isn't enough, there should be quantitative measurements. To make these measurements, we should somehow count the radiation events. And since we have another timer to spare, we'll use it for this. We will set timer TIM3 to increment its counter whenever it sees that TIM2 produced a pulse.
/* TIM3 SETUP (TIM2's PULSE COUNTER) */ CLK_PCKENR1_bit.PCKEN11 = 1; // Enable TIM3 clock TIM3_SMCR_bit.TS = 3; // Trigger source - TIM2 TIM3_SMCR_bit.SMS = 7; // Trigger increments timer's counter TIM3_CR1_bit.CEN = 1; // Start the timerThis works independently from the CPU as well, so we can read the quantity of registered radiation events whenever we want.
-
Boosting voltage
10/03/2022 at 16:19 • 0 commentsTowards efficient boost converter architecture
Most DIY Geiger counters that I've seen on the Internet have very simple architecture: just an oscillator driving a transistor, sometimes with Zener diodes to limit the output voltage. This approach is inefficient, so I've decided to make a boost converter that's both efficient and compact. The first thing that comes to mind is that the converter has to disable the oscillator when it's not needed. This approach is described in an appnote by Maxim Integrated:
![]()
Here they're using a comparator to control the oscillator output: when the feedback voltage is less than the reference voltage the oscillator is enabled, and vice versa. Since a Geiger tube only consumes energy when hit by a particle, the oscillator shall remain idle most of the time, and that saves a lot of power. Also there's a 6-stage voltage multiplier, so we can feed the lower output voltage from its first stage to a feedback divider, thus minimizing the current through it. I'll be reducing losses in the feedback divider as much as possible since it consumes the most power in the circuit above.
Setting up the microcontroller
One huge benefit of microcontrollers is that they have peripherals that can replace discrete components, saving power and PCB space. In our case we can use a microcontroller to replace a voltage reference and an oscillator in the circuit above (and even a comparator if we wouldn't have to drive a 4-backplane LCD).
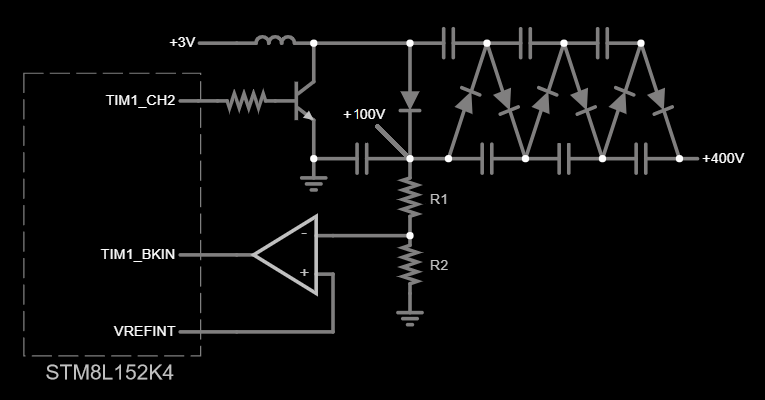
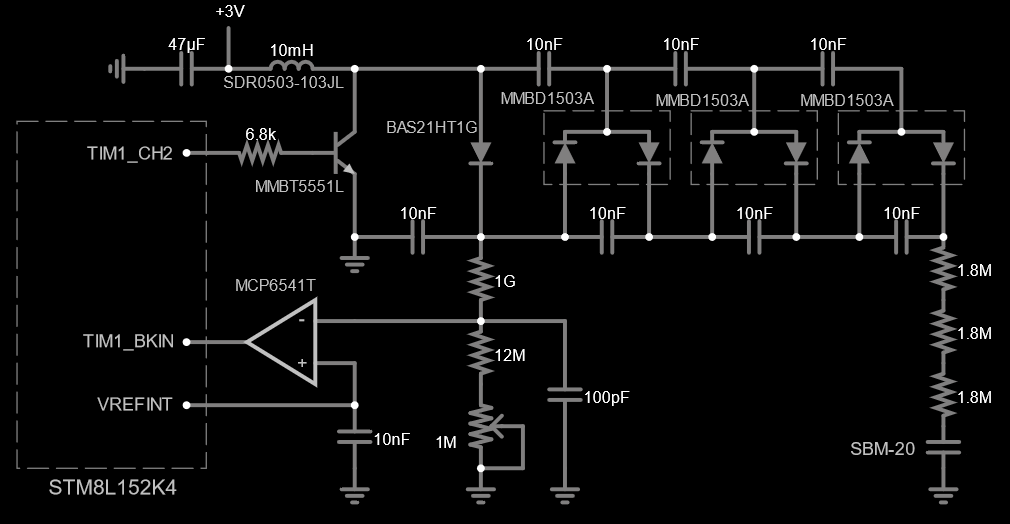
We should set the MCU to output a reference voltage and a comparator-controlled PWM: when the comparator output is LOW (voltage divider voltage less than reference voltage), the timer generates PWM, otherwise it sets its output to LOW, closing the transistor. The only timer that we can use is TIM1 because pins, tied to other timers are needed for other functions. This timer has a break input which disables timer's output when it receives a signal, which is exactly what we need. The schematic is as follows:
![]()
To use a lower value inductor for better energy and space efficiency, we'll set the PWM generation for shortest positive pulse possible, i.e. highest frequency and lowest duty cycle; the best we can get with a timer is half the system clock. The MCU is clocked from 32.768 kHz crystal, which means 50% duty cycle PWM at 16.384 kHz.
To write the code I'll be using the IAR Embedded Workbench for STM8.
#include "iostm8l152k4.h" void Clock_Init(void) { CLK_SWCR_bit.SWEN = 1; // Prepare to change the clock source CLK_SWR = 0x08; // Change the clock source to LSE while(CLK_SWCR_bit.SWBSY==1); // Wait until it starts up CLK_CKDIVR = 0x00; // Change the clock prescaler from default /8 to /1 CLK_ICKCR_bit.HSION = 0; CLK_ICKCR_bit.LSION = 0; // Disable internal oscillators } void VREF_Init(void) { while(!PWR_CSR2_bit.VREFINTF); // Wait for voltage reference to stabilize CLK_PCKENR2_bit.PCKEN25 = 1; // Enable clock for COMP peripheral COMP_CSR5_bit.VREFTRIG = 2; // Disable Schmitt trigger on PD7 to reduce leakage COMP_CSR3_bit.VREFOUTEN = 1; // Enable VREF output RI_IOSR2_bit.CH8E = 1; // Connect VREFOUT to PD7 CLK_PCKENR2_bit.PCKEN25 = 0; // Disable clock for COMP, was only needed for init } void TIM_Init(void) { /* TIM1 SETUP (SYSCLK/2 GATED BY EXTERNAL SIGNAL) */ PD_DDR_bit.DDR4 = 1; // Set PD4 to output mode PD_CR1_bit.C14 = 1; // Set PD4 output to push-pull mode CLK_PCKENR2_bit.PCKEN21 = 1; // Enable TIM1 clock TIM1_ARRH = 0; TIM1_ARRL = 1; // Highest frequency (16.384 kHz) TIM1_CCR2H = 0; TIM1_CCR2L = 1; // Lowest duty cycle (50%) TIM1_BKR_bit.BKE = 1; // Enable output break TIM1_CCMR2_bit.OC2M = 0x6; // Set output mode: PWM mode 1 TIM1_CR1_bit.CEN = 1; // Enable timer counter TIM1_CCER1_bit.CC2E = 1; // Enable TIM1_CH2 output TIM1_BKR_bit.AOE = 1; // Automatically recover from output break } int main(void) { Clock_Init(); VREF_Init(); TIM_Init(); }The beauty of this approach is that it's completely core independent — notice that that there is no code after initialization, the CPU isn't necessary to control the boost converter. Let's test if this works. I've connected a voltage source to the comparator's inverting terminal and the MCU should output PWM when the voltage is below reference (1.224V) and output LOW level otherwise:
![]()
Yellow trace — TIM1_CH2 output, Blue trace — voltage at comparator's inverting terminal Seems to work fine, let's move to the analog part of the boost converter.
Selecting components
Feedback resistors and voltage multiplication
As I've said, the feedback network (R1 and R2 on the circuit above) can easily be the biggest energy consumer in the whole circuit, so we should use resistors of the highest value and have the lowest feedback voltage possible. Feedback voltage depends on the number of multiplication stages. Initially I've built a booster with x12 multiplier but it had a parasitic oscillation issue which I failed to resolve.
![]()
Failed booster with a 12-stage multiplier I ended up with the x4 multiplier (as shown on the circuit above) which is compact and has reasonably low current consumption. We have to supply 400V to an SBM-20 tube, so the feedback voltage at the first multiplication stage shall be 400V / 4 = 100V. At this input voltage, the feedback divider output voltage should be equal to VREF — 1.224V.
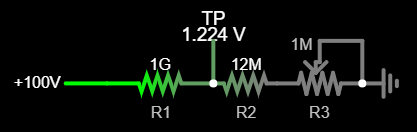
I've got my hands on some 1GΩ resistors, so I'll use them for R1. Then R2 = 12.4MΩ. Resistors of this value are not available, so I've split it into a 12MΩ resistor and 1MΩ potentiometer, which will also allow to compensate for R1 and VREF tolerances:
![]()
Using a 100V for output feedback may seem horribly inefficient but let's calculate how much battery current the boost converter shall actually consume to drive the feedback network. For this we should write equations for the power consumed on both sides of the converter (low voltage side and high voltage side):
From this we can derive the battery current, consumed by the booster's feedback loop:
Of course, the real-world value will be higher because the efficiency of the boost converter is less than 100%. Also at lower battery voltages the current consumption will increase: 5.5µA at 1.8V (lowest operating voltage for the MCU). Still, I consider this acceptable, given that the total consumption of the device is 44µA at full battery and normal background radiation level.
Comparator
Since we are using very high value resistors, we should mind the load we put on the feedback voltage divider — the comparator must have a low input bias current (and a low quiescent current if we want long battery life). I'm using an MCP6541 comparator in this project because due to the chipageddon it was the only one available to me that met the requirements: 1pA input bias current, 600nA quiescent current. 3.3mV hysteresis is barely enough to provide enough noise immunity though, this is most likely the main reason I was unable to make a 12-stage voltage multiplier work. If I could, I'd use something like TLV7031 or TLV4051R1.
Inductor
Inductor selection directly influences the efficiency and maximum output power of the converter. I've chose SDR0503-103JL — 10mH inductor with 110Ω max series resistance because it was the highest value inductor available with reasonably small dimensions (I couldn't have an inductor with >3mm height). We want high inductance because of very low PWM frequency, and also high inductance reduces peak inductor current during converter operation which helps to reduce losses in a transistor, — high-voltage transistors don't handle high currents very well.
Let's see how much power our boost converter can provide with this inductor. To find it, we should find its peak current first. Current vs time formula for an inductor with series resistance is as follows:
where:
- VL — voltage applied to the inductor
- Ra — sum of resistances in inductor's current path: inductor series resistance, power supply ESR, transistor etc. For simplicity, I'll assume all resistances except inductor's negligible.
- L — inductance
To find the amount of energy, transferred during one PWM cycle, we should first find the current that the inductor builds up during transistor ON time (which will be its peak current). Our MCU outputs 16.384 kHz PWM with 50% duty cycle. Then:
where D — duty cycle. From this, the peak inductor current will be:
Here we're finding the peak current at the lowest supply voltage (1.8V) to find the worst case power output.
The energy, transferred during each PWM cycle is:
These energy transfers occur at 16.384 kHz rate, so maximum output power will be:
Now we will check if that's enough to drive the feedback divider and a Geiger tube. Feedback divider consumes:
With a Geiger tube things are more complicated. Given a fixed supply voltage, a Geiger tube consumes a fixed amount of charge during each registered event, however for some reason the amount of charge is not specified in datasheets. Fortunately, there is a rule of thumb: the tube consumes a charge, roughly equal to 1/3 of the total charge, held by tube's capacitance:
The maximum counting rate for an SBM-20 tube is 1400 CPS (Hz), so maximum consumed power will be:
This formula stems from definition of charge: Q = I ⋅ t, from this I = Q / t = Q ⋅ f.
So the total power, consumed by high-voltage part will be:As you can see, we have plenty of headroom even with fully discharged battery.
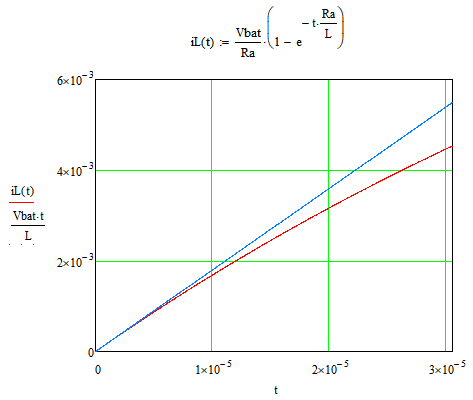
Now let's talk about efficiency. The series resistance of our inductor is 110Ω, this obviously will significantly reduce efficiency. A simple way to check the efficiency (and estimate optimal tON) for given inductor is to compare the iL(t) graphs for lossless and lossy inductor. A formula for ideal inductor stems from the basic inductor equation:
I'll plot the inductor currents from t = 0 to tON.
![]()
As we can see, as time increases, the graph of current in real inductor rises slower and slower, and eventually it will become a flat line because current will be limited by inductor's series resistance. Obviously, the more these graphs deviate from each other, the lower the efficiency will be. In our case, at t = tON, iL(real) / iL(ideal) = 0.85 (85%), so we're losing about 15% efficiency with this inductor. I think, this is acceptable, considering the small size of the inductor.
Transistor and its base resistor
I was unable to find any suitable MOSFETs, so I resorted to bipolar transistors. And there's still not many to choose from: BCX41, BSR19A and MMBT5551 are the only ones I would use. I was able buy only the MMBT5551. There are two transistor parameters that I consider most important — collector leakage and collector-emitter saturation voltage at given collector and base currents.
Low leakage helps to reduce energy losses in the inductor, improving efficiency. The general idea to get low leakage is to have a big headroom in voltage rating . This transistor is rated for 160V, so we have 60V headroom.
![]()
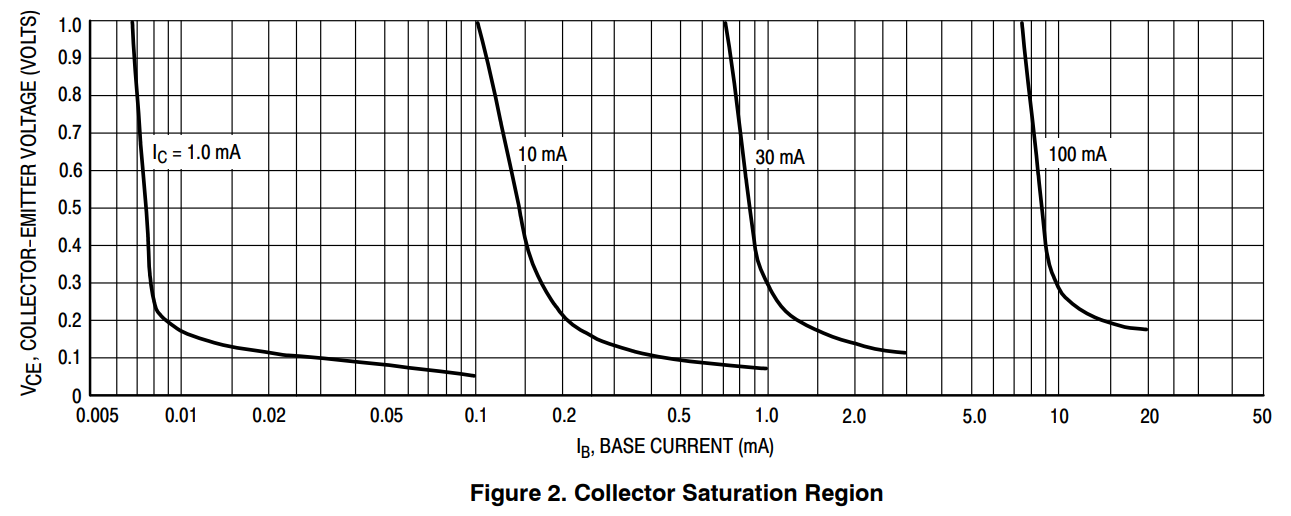
Collector-emitter saturation voltage (VCEsat) is what causes energy losses in the transistor when it's open, so we want it to be as low as possible.
![]()
As you can see, VCEsat decreases as base current increases, so we should find a compromise between base current and VCEsat. The maximum collector current is equal to peak inductor current when the battery is at full capacity:
so we should use the second left graph to find the optimal base current Ib. The goal is to find Ib such that the sum of energy, lost on driving the base and energy, lost due to VCEsat, is minimal.
Energy, dissipated in every PWM cycle due to VCEsat:
This formula stems from definition of energy: E = P ⋅ t = VI ⋅ t. After integrating we get:
At this point we should take into account that the transistor will reduce the inductor voltage by VCEsat, which is reflected in formulas above.
Energy, dissipated in every PWM cycle to drive the transistor base is:
Here 0.7V is base-emitter voltage drop.
Now I'll just try various points on the graph and find the point with smallest Evce + Eb, which happens to be at Ib = 0.4 mA (with VCEsat = 0.1V and total loss being 35.3 nJ per cycle). Since we took this value from the graph for Ic = 10mA, we get:
Now if we substitute our peak inductor current for Ic, we'll get:
And then the base resistor will be:
Closest value from E24 series is 7.5kΩ but 6.8kΩ from E12 series will work fine as well.
Tube anode resistors
The datasheet for SBM-20 tube recommends a 5.1MΩ anode resistor. Since we're optimizing the PCB size, we have to use small components. In our case we can use three SMD 0805 resistors in series: most of them are rated for 150V, so three of them should withstand 450V (given they have same value). If we use 1.8MΩ resistors, we'll get 5.4MΩ. which is close enough. At the last moment I realized I only have 2.2MΩ resistors, so I've used those and they work fine.
Diodes and capacitors for voltage multiplier
We are interested in three things here: appropriate voltage rating, low leakage and small footprint. In our case, components in voltage multiplier must be rated at least for the feedback voltage: 100V. Not double that, like most articles about voltage multipliers tell. In our case, the input voltage swings from 0V to 100V, not from -100V to 100V like these articles assume.
There are plenty of suitable diodes and capacitors, I've chose BAS21 and MMBD1503A diodes because they have small footprint and 10nF / 500V, SMD 0805 capacitors to have a reasonable voltage headroom to avoid capacitance derating. Some of you might ask if 10nF capacitors are enough to provide sufficient power for a Geiger tube. The equivalent output resistance of a voltage multiplier given all its capacitors are the same value is:
where n — number of multiplication stages. Obviously, this is more than enough to drive a 5.4MΩ anode resistor.
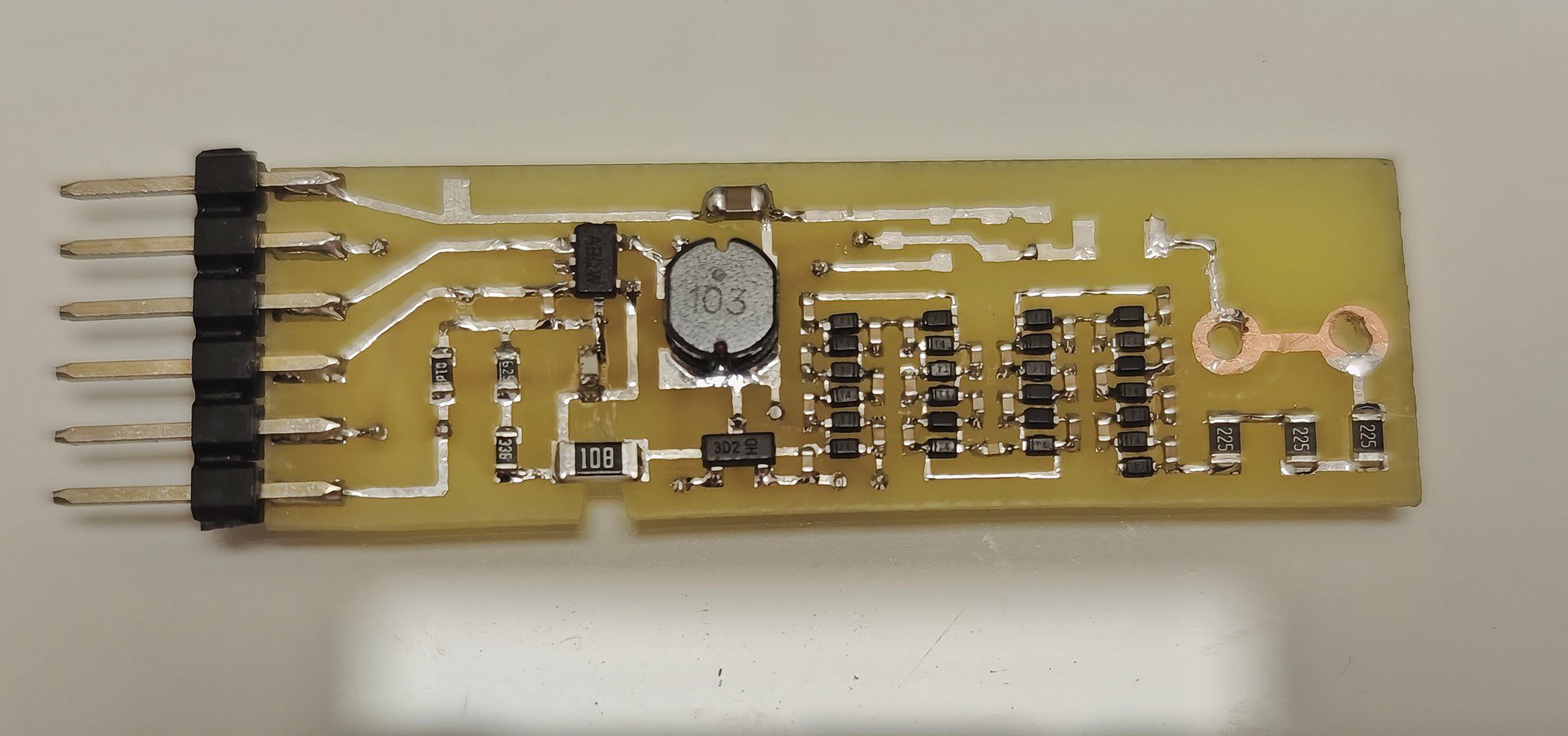
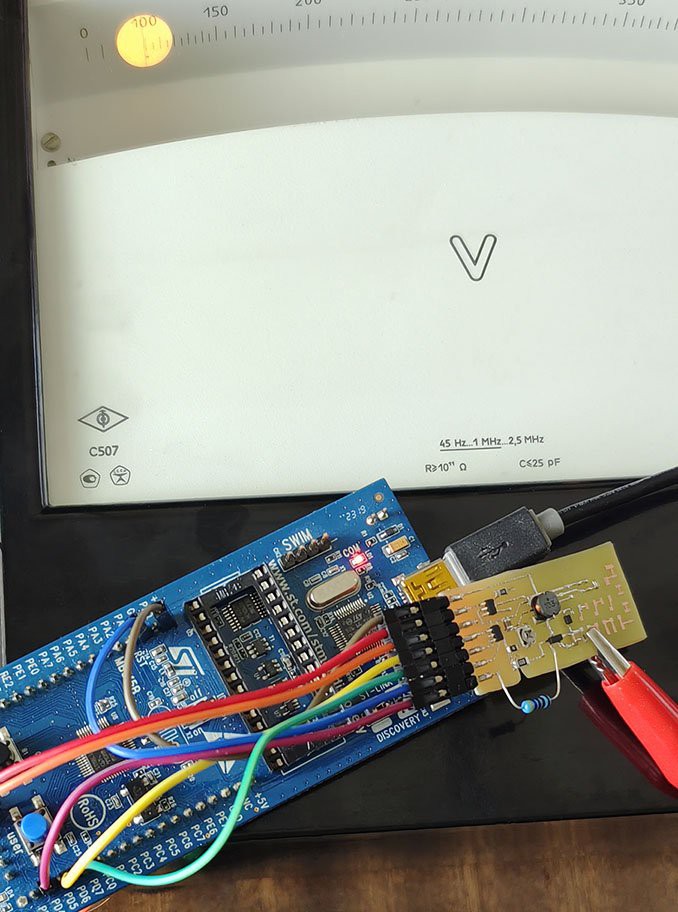
Testing and debuggingI've made a crude prototype to test the operation of my boost converter. I forgot to make proper photos, so here's one without voltage multiplier, — I was testing if the boost converter correctly outputs 100V, and it does. I was using STM8L-DISCOVERY board for software prototyping.
![]()
Notice that I am using an electrostatic voltmeter to measure the voltage because a regular multimeter will overload the boost converter and thus show a voltage, lower than the converter would output without multimeter leads connected. This voltmeter has 100GΩ input resistance, so it doesn't affect the operation of the boost converter. Also notice a small cutout on the bottom left of the PCB. I made it to reduce PCB leakage under the 1GΩ resistor which may reduce its effective resistance.
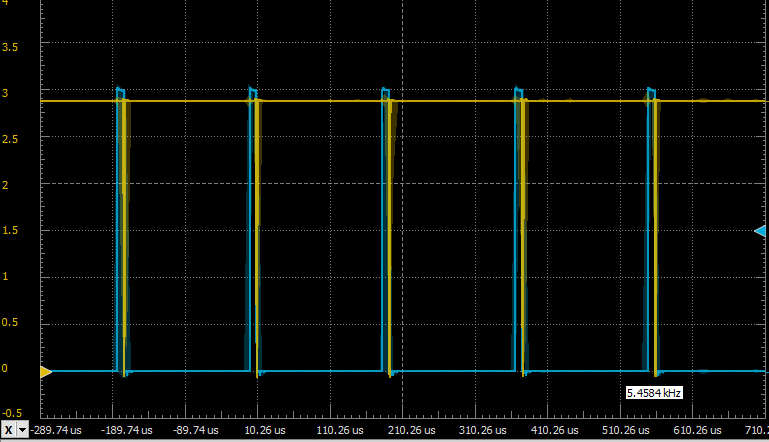
While the converter has correct output voltage, there was a problem — it was consuming a whopping 110µA current. I hooked the oscilloscope to the PWM output and comparator output and saw this:
![]()
TIM1_CH2 output (blue trace), comparator output (yellow trace) This looks nothing like a 16.384 kHz PWM with 50% duty cycle that we expect the MCU to generate, and it acts like this because the comparator sends very short breaking pulses to the MCU, which in turn makes PWM pulses much shorter than intended. Because of that, to maintain voltage, the MCU has to generate PWM almost non-stop because with such short positive pulses the converter cannot push too much power, and to make matters worse, the transistor doesn't even have time to fully open. Also fun fact, the oscillation occurs at 5.458 kHz which is exactly 3 times lower than 16.384 kHz. Go figure why that is.
Then I looked at VREF and saw this:
![]()
Yellow trace - comparator output, Blue trace - VREF ripple This is getting more and more weird. How can a comparator with 1pA input bias current load the VREF output so much that it causes 0.75V ripple on it?! I've tried replacing the comparator, to no avail. Guess I just got a bad batch of these comparators. Also apparently the oscilloscope loaded VREF output more than it could handle (it can't output more than 1 µA) and this shifted the oscillation frequency.
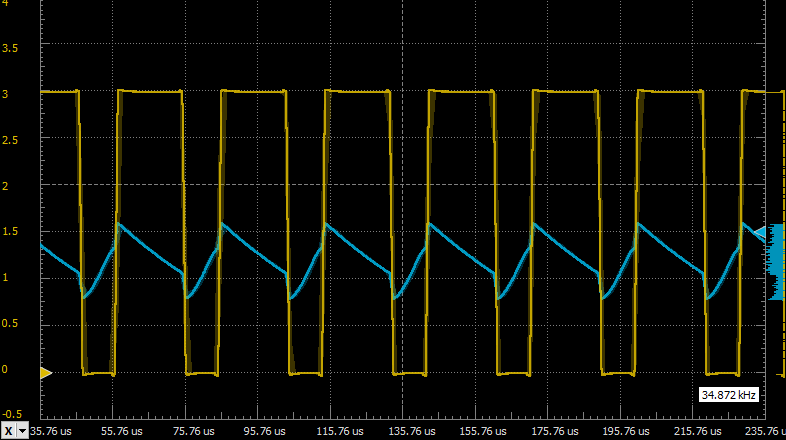
First thing that came to mind — bypass the VREF with a 10nF capacitor. This indeed reduced VREF ripple to ±1 mV (which I think is a lot for such a large capacitor and light load) but did not solve the oscillation problem at all. Then I assumed that the same thing happens on the feedback side and decided to bypass the feedback divider output as well. I couldn't just use whatever capacitor I wanted there because as capacitance increases, the leakage current increases as well and since we have a 1GΩ resistor in the feedback divider, at some point the leakage current of a bypass capacitor may become significant. So I've started with a small value — 10pF and started increasing it until the parasitic oscillation was gone, at 100pF. A healthy boost converter drives a transistor like this:
![]()
Now the converter consumes 7µA when idle (MCU consumption not included, just inductor+comparator) and I'm happy with this number. The final schematic is as follows:
![]()
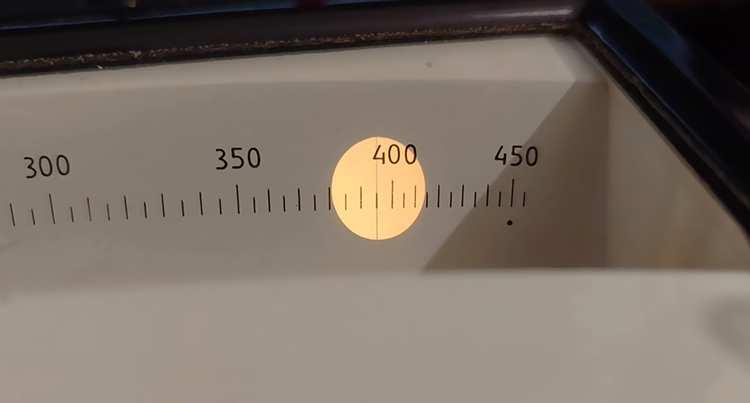
And, of course, the final test — for the output voltage after multiplication.
![]()
Compact, low-power Geiger counter
A marker pen sized Geiger counter with up to 12 months battery life from 2xLR44, based on STM8L152K4 microcontroller