We spent a considerable amount of time tuning PID constants in the field. The process involved connecting the autopilot to the PC via a USB cable, editing C code, compiling and flashing the whole autopilot code for every adjustment of a PID variable.
We want anybody to be able to build this kite in any size and configure the autopilot accordingly without having to edit C code.
And we want to make life easier for ourselves so we can draw any smartphone to change the autopilot configuration.
So now we can do exactly that. While the kite is on the ground, we can also test sensors and motors via Wifi using the GUI below.
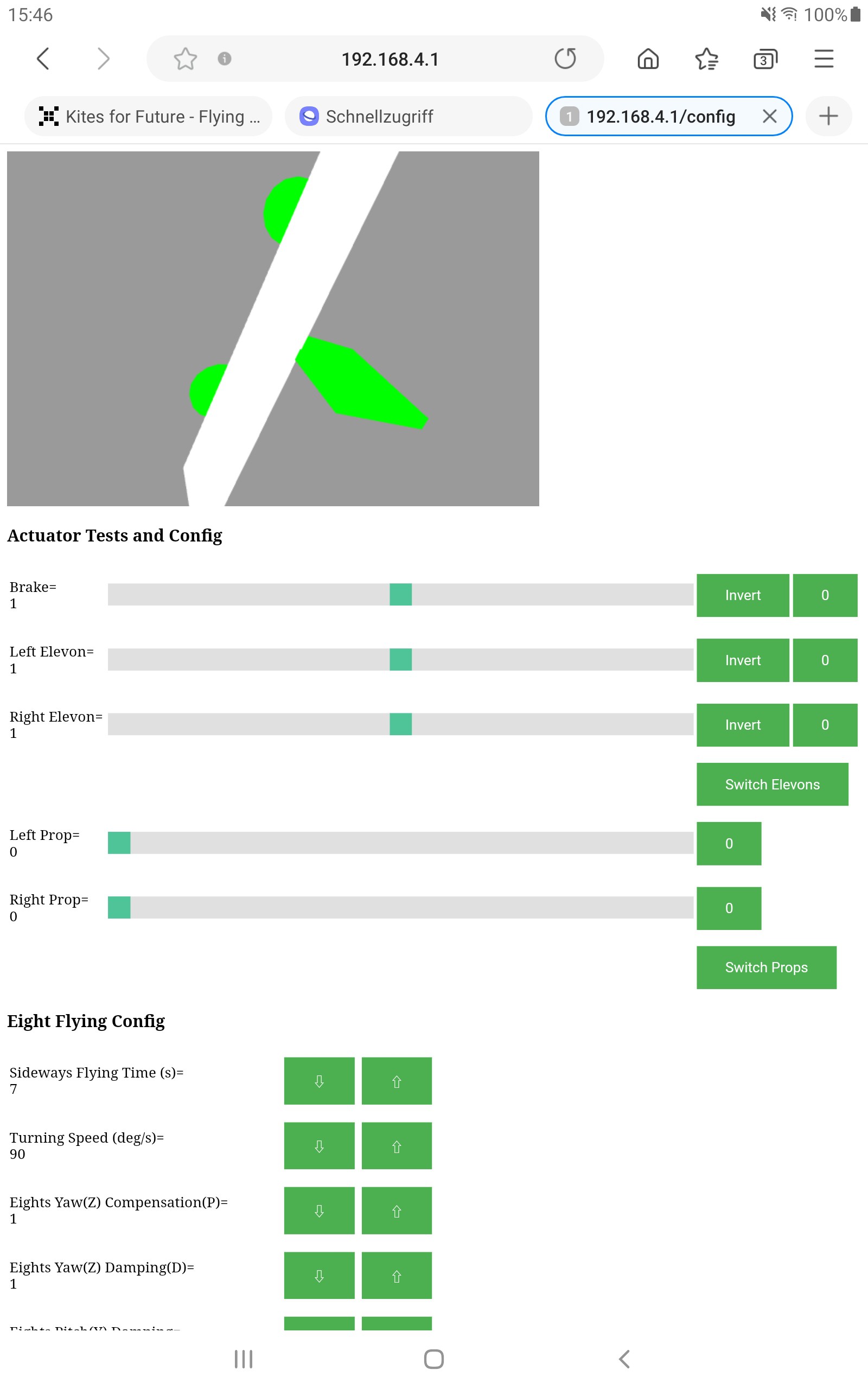
Best part: Adjusting the PID constants should work during flight too.
So from now on, no programmer is needed to continue on this project. If you want to copy our kite power station, we're happy to help to make it as easy as possible.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.