0%
0%
1Keyer
An iambic paddle controller for sending Morse code.
 Mark VandeWettering
Mark VandeWetteringBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

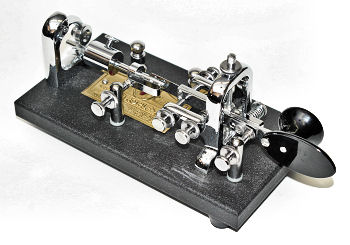 At the right you can see a paddle which is had between the thumb and forefinger of the right hand. When pressed to the right, it operates as a norrmal key, and is used to generate dashes. But when pushed to the left, a mechanical pendulum frequently makes and breaks contact, which allows the user to send a nearly continuous stream of dits. The mechanism itself is pretty complicated and fussy, to these keys are pretty expensive, and can require considerable skill to use.
At the right you can see a paddle which is had between the thumb and forefinger of the right hand. When pressed to the right, it operates as a norrmal key, and is used to generate dashes. But when pushed to the left, a mechanical pendulum frequently makes and breaks contact, which allows the user to send a nearly continuous stream of dits. The mechanism itself is pretty complicated and fussy, to these keys are pretty expensive, and can require considerable skill to use.
 Ken Yap
Ken Yap
 Luke Thompson
Luke Thompson
 mateusz.kolanski
mateusz.kolanski