 David
DavidAlright, so this update has a little less progress than I would like. I was really close to being able to drive a robot through FPV, but then I set it on fire….
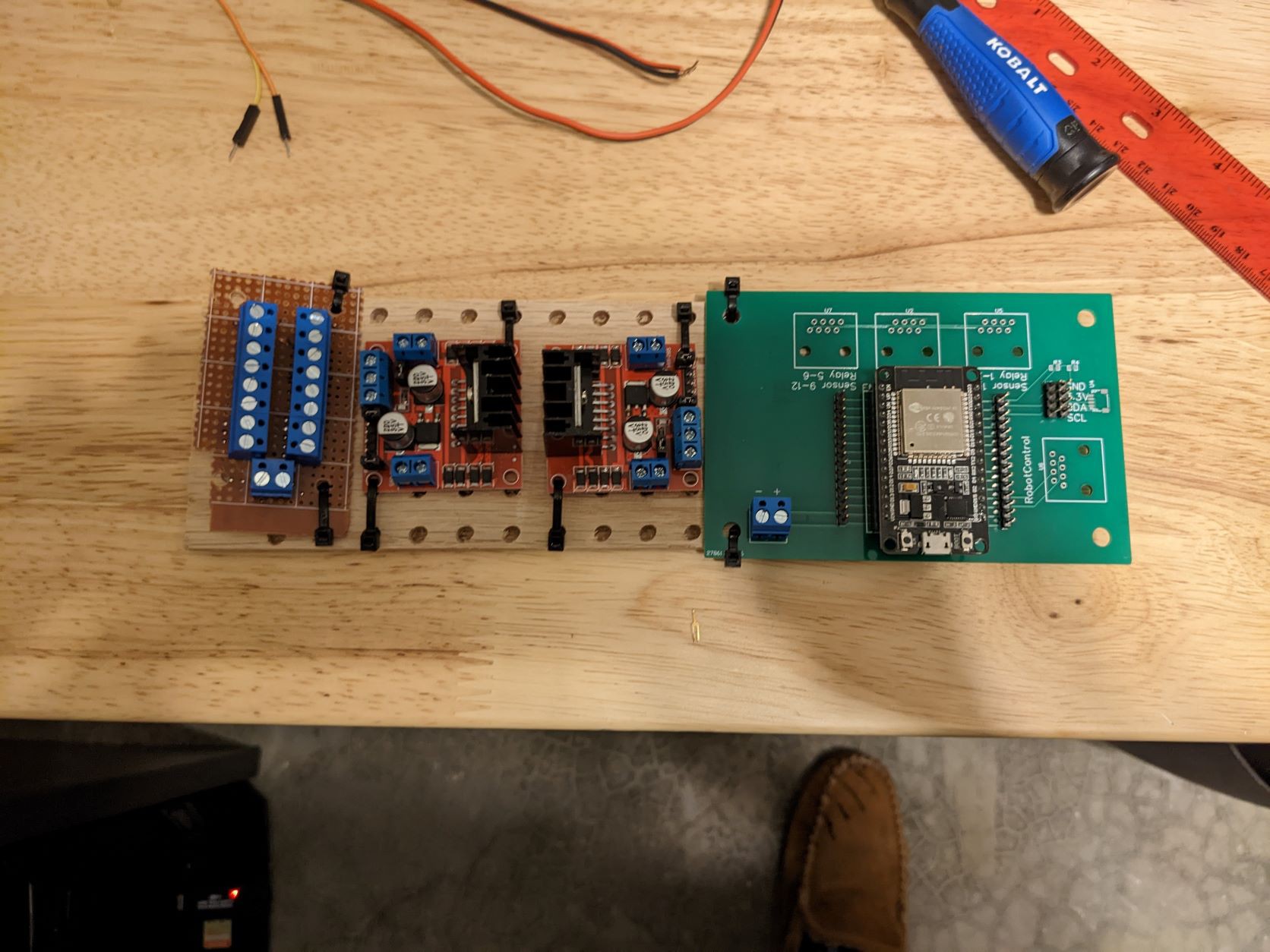
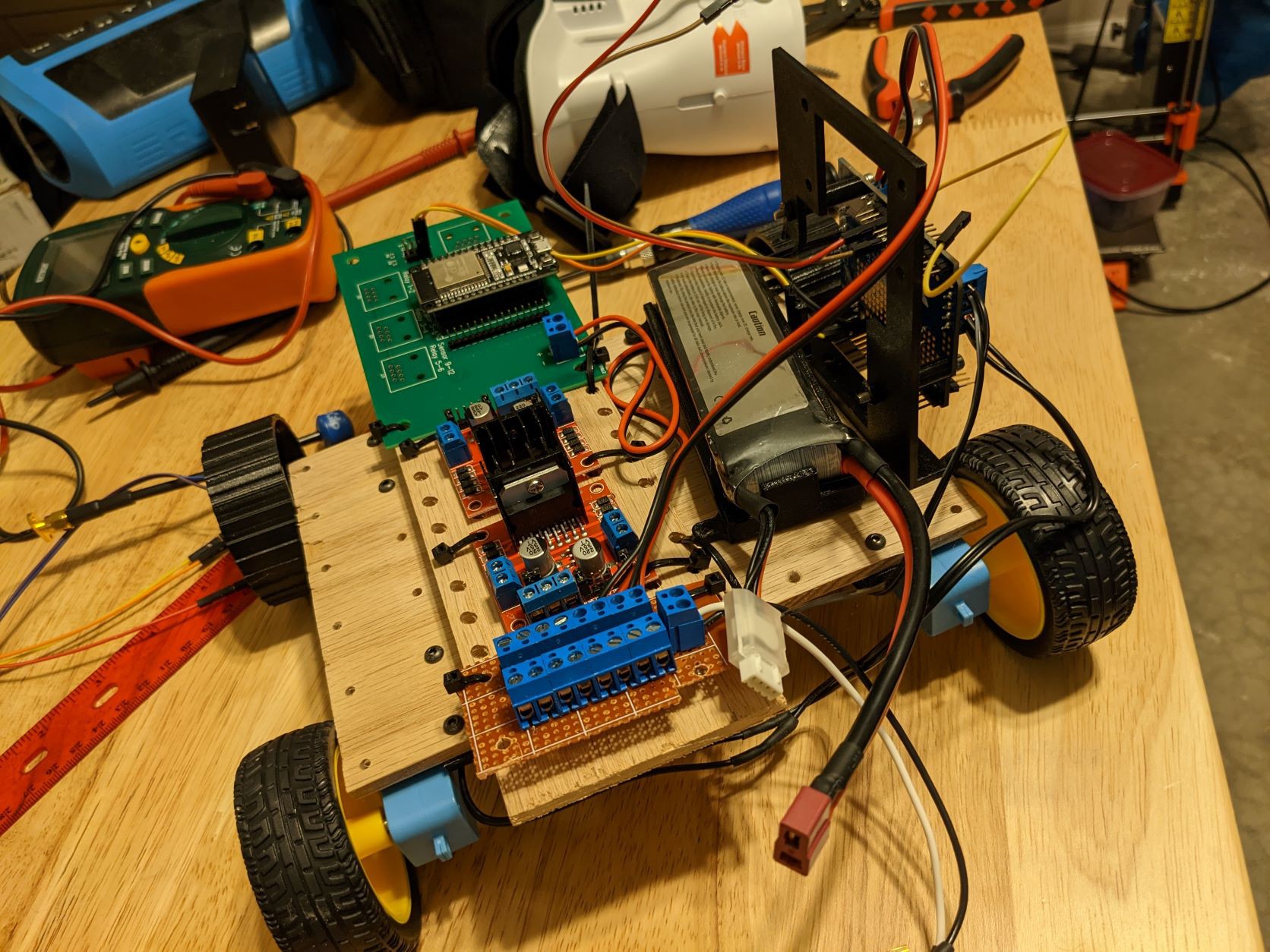
I started out by spending an unfortunately long time contemplating how to mount all of the electronics. Decided to go with zip ties on to a board that has holes that are spaced out every half inch. I could have bolted them to the board, butttttt zip ties are so much quicker to use, and they won't loosen up from vibration!
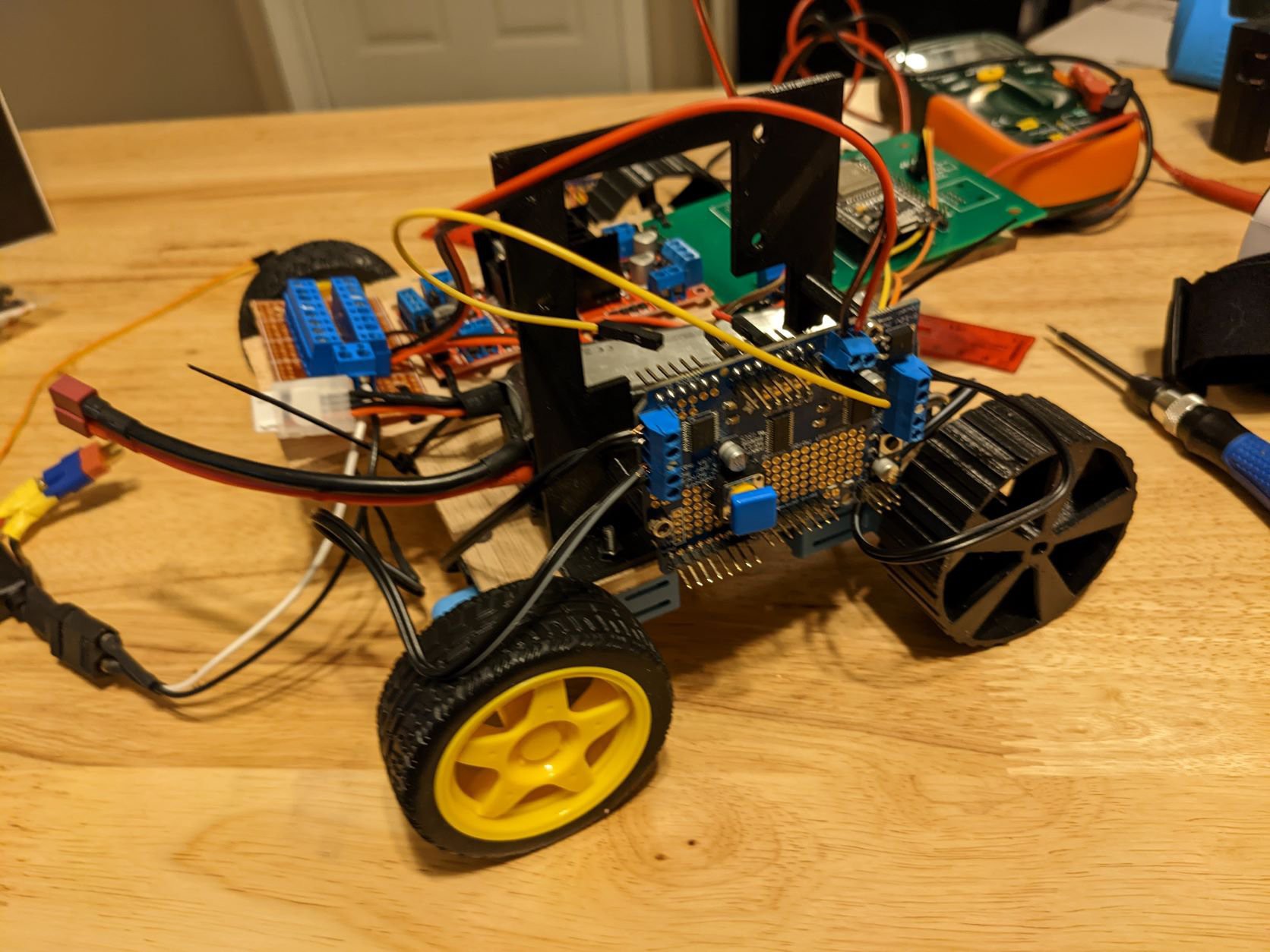
Speaking of laziness, I decided I wanted to try and get something moving as quickly as possible and grabbed a chassis I used in a previous project. It had 4 metal gear TT motors that were already hooked up to a Adafruit motor shield.
I also used the control code from that previous project. (leave a comment if you want a copy!) It sets up the esp32 to broadcast a wifi network that I connect to with my desktop. The Desktop computer is running a python script that sets up a UDP socket to the esp32 to send commands. Right now I just have it set up to send the axis values from an old usb Joystick I had laying around.
The bot was driving around on the first try butttt then the second time I plugged in the battery, the voltage regulator on the esp32 caught on fire…. It was a literal fire, tons of smoke, a little red dot of flames and a terrible smell! This probably happened due to putting too much voltage on it from the battery. The device recommends 6-12 volts input, and I was feeding it 12-13V from the fully charged battery. Thankfully I have extra esp32s and if I really really wanted to I could probably replace the voltage regulator on there. I'm going to find a external 6v voltage regulator to power the esp32, and the servos I'm planning on using in the future.
Here's all the parts that I'm using in this post. I included an affiliate link for each item, if you decide to click on it, next time you buy something from amazon a small percentage will be sent to me to fund my next robot project! No extra cost to you!
| Part | Normal Link | Affiliate link |
| Motor shield | ||
| Zip ties | ||
| TT motors |
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.