 Limenitis Reducta
Limenitis ReductaAnimal-inspired drones and robots have now been observed accomplishing a wide variety of tasks, including surveillance, predictive maintenance in industrial settings, and as mobile payload transportation system for when a situation becomes too dangerous for a human.

But unlike the current robots, I wanted to make a quadruped robot dog that was comprised entirely of replaceable modules rather than a monolithic system. This modular approach allows for the robot to be adapted in many more ways than a traditional one, and as new modules are introduced, the platform's capabilities can be greatly enhanced.
This Project which is called “LOTP” (stands for “Line On The Paper”) and it has been awarded the 1st Prize of TUBITAK Regional Science and Technology Competition, awarded the 3rd Prize of TUBITAK National Science and Technology Competition in Robotics & Coding branch and awarded the 1st Prize INSPO 2021 International Science Projects Olympiad in Engineering.
In the robot's current form, the platform is made up of six distinct units in a default configuration. At the core there is a computer unit which is responsible for gathering inputs, performing calculations, and outputting motions. A Teensy 3.5 was selected due to its fast speed and large amounts of RAM/flash storage. Additionally, the unit contains a Wi-Fi module, a GPS module, and a gyroscope for orientation data. Main battery unit and backup battery unit provide power to the robot with their pair of LiPo battery packs, and a regulator unit reduces the voltage to 6V for the servos and 3.3v/5v for the electronics. Finally, pressure sensors positioned at the legs to adjust body under pressure.
There’s also a provision for a camera which sends live video to the remote controller. That implemented FPV camera allows us to look through the eye of Robot Dog by monitoring with the FPV screen fixed on the remote controller.
To get the robot moving, I developed a DIY remote controller that features a pair of joysticks for producing basic movements. A large character LCD shows current telemetry and data sent by sensors (such as GPS coordinates and dangerous gas ratio values). A series of buttons can be used to navigate the menu and perform various actions. An Arduino Micro drives everything and communicates with the robot over Wi-Fi by sending serial data.
It has 3 autonomous movements capacity. These are keeping balance on curved surface, body height adjustment under pressure effect and avoiding obstacles
Keeping balance on curved surface is the autonomous movement which adjusts the body, makes it parallel to the ground and keeps the balance of Robot Dog.
Body balance is kept by using gyroscope values and controlling with PI (Proportion Integral)
Body height adjustment under pressure effect is an autonomous movement for protecting body against harmful forces such as push, pressure or hit. If pressure values which were measured by Pressure Sensors are higher than critical threshold value, then servo motors will be rotated to lower the body till pressure is decreased.
Avoiding obstacles behavior is moving away from approaching obstacles. Lidar sensor collects data by rotating 360 degrees. After this data is processed if any obstacle is found, Robot dog will be moved to opposite direction. Lidar sensors are located on Lidar Module and this module enables Robot Dog to sense oncoming obstacles. It measures the distance of obstacles so that makes possible Robot to avoid them. Lidar sensor rotates 360 degrees and measures distance of objects around up to 2 meters by sending infrared signal pulses.
LOTP the robot dog has 2 movement style, walking and Standing Position Movements. Walking style of Robot can be described as «Trot». Trot style walking means while two feet are down on the ground other two feet are up and leave the ground.
Complete movement happens...




 Radu Motisan
Radu Motisan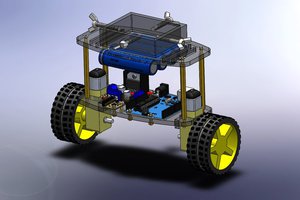
 electronicsworkshops
electronicsworkshops
 codersilver
codersilver
Congratulations for this very good project.
Peter