 Mike Rigsby
Mike RigsbyRoamer 3 is the 4th robot in a series. Starting with "Little Flash," a bump and evade capacitor powered robot. Next came "Roamer," an autonomous self-charging robot (entirely random movement). "Roamer 2" added a camera so that finding the charger was not a question of chance.
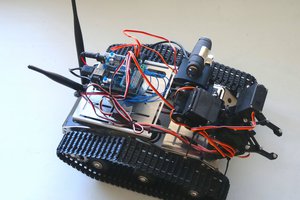
"Roamer 3" (in progress) upped the charge storage and dropped the camera (uses an 8 x 8 thermal sensor) to increase time away from the charger.
I added one capacitor (500 farads) to increase the total energy available. Motors and Arduino controls consumed about 500 mA @ 9 volts while moving. The Pixy camera and Arduino consumed about 300 mA @ 9 volts all the time.
Eliminating the Pixy camera and 2nd Arduino saves about 300 mA. The thermal sensor consumes very minimal power. Roamer 3, while moving, uses around 550 mA @ 9 volts. When stopped (Roamer 3 is happy to sit next to the person it follows), Roamer 3 consumes about 90 mA. Roamer 3 can spend 60 minutes or more away from the charger (depending on how much travel is involved) while recharging in about 2 minutes.
 Boian Mitov
Boian Mitov
 codersilver
codersilver
 srayner02
srayner02
 Norbert Heinz
Norbert Heinz