0%
0%
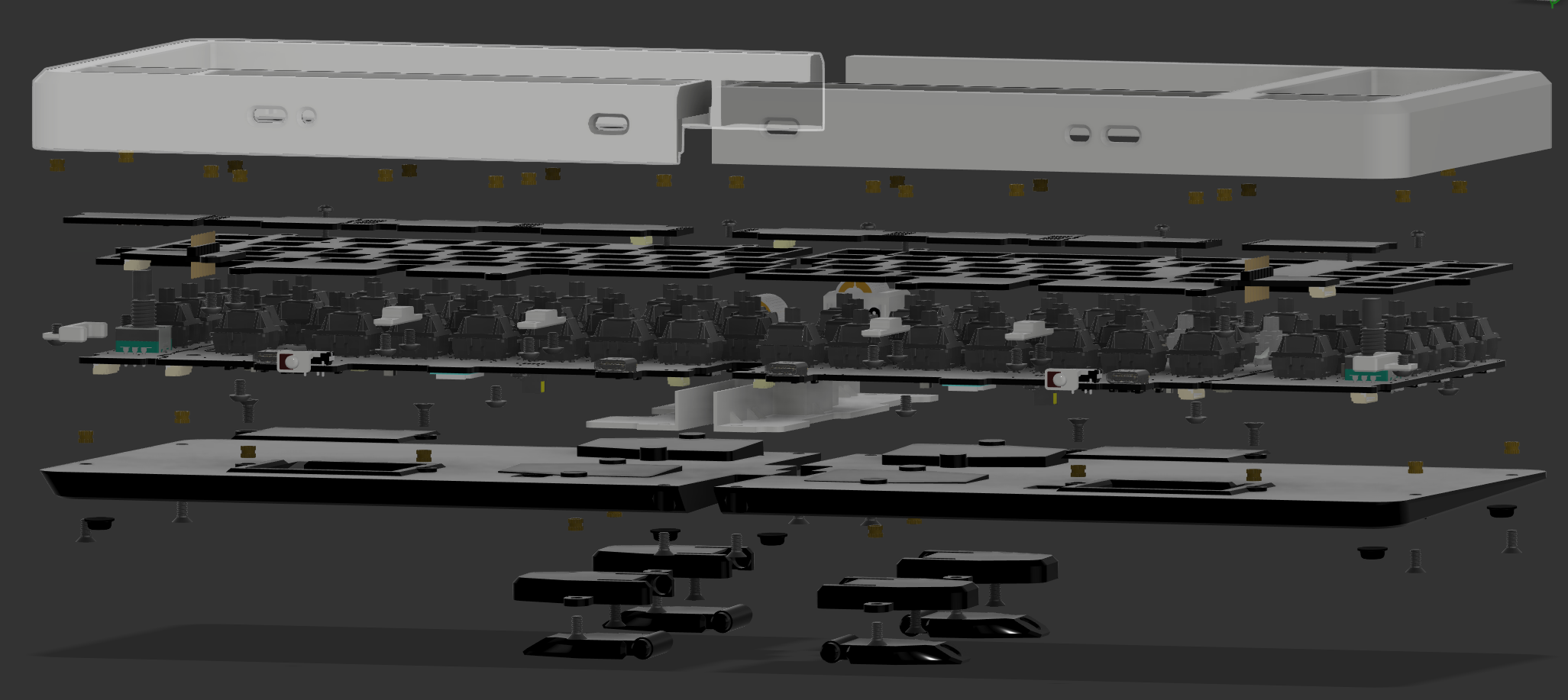
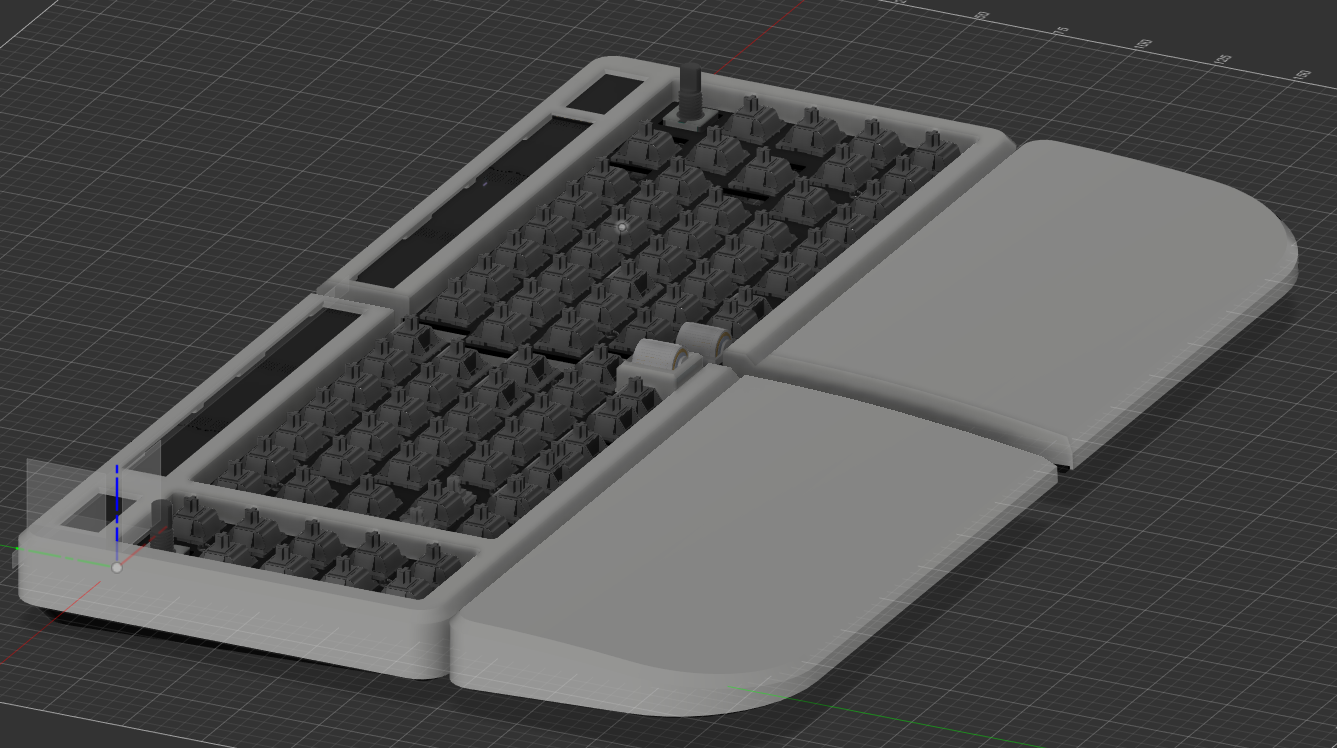
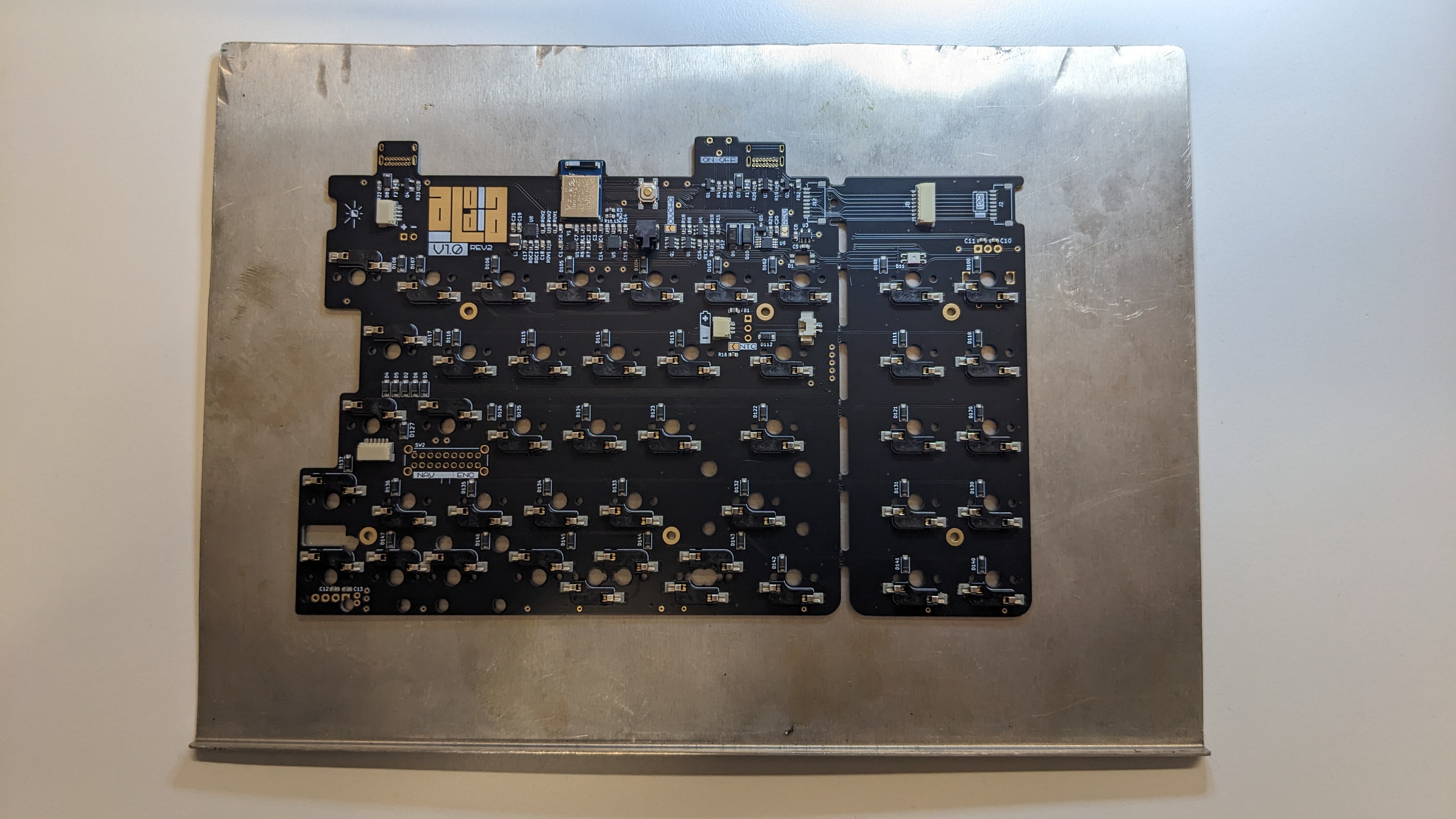
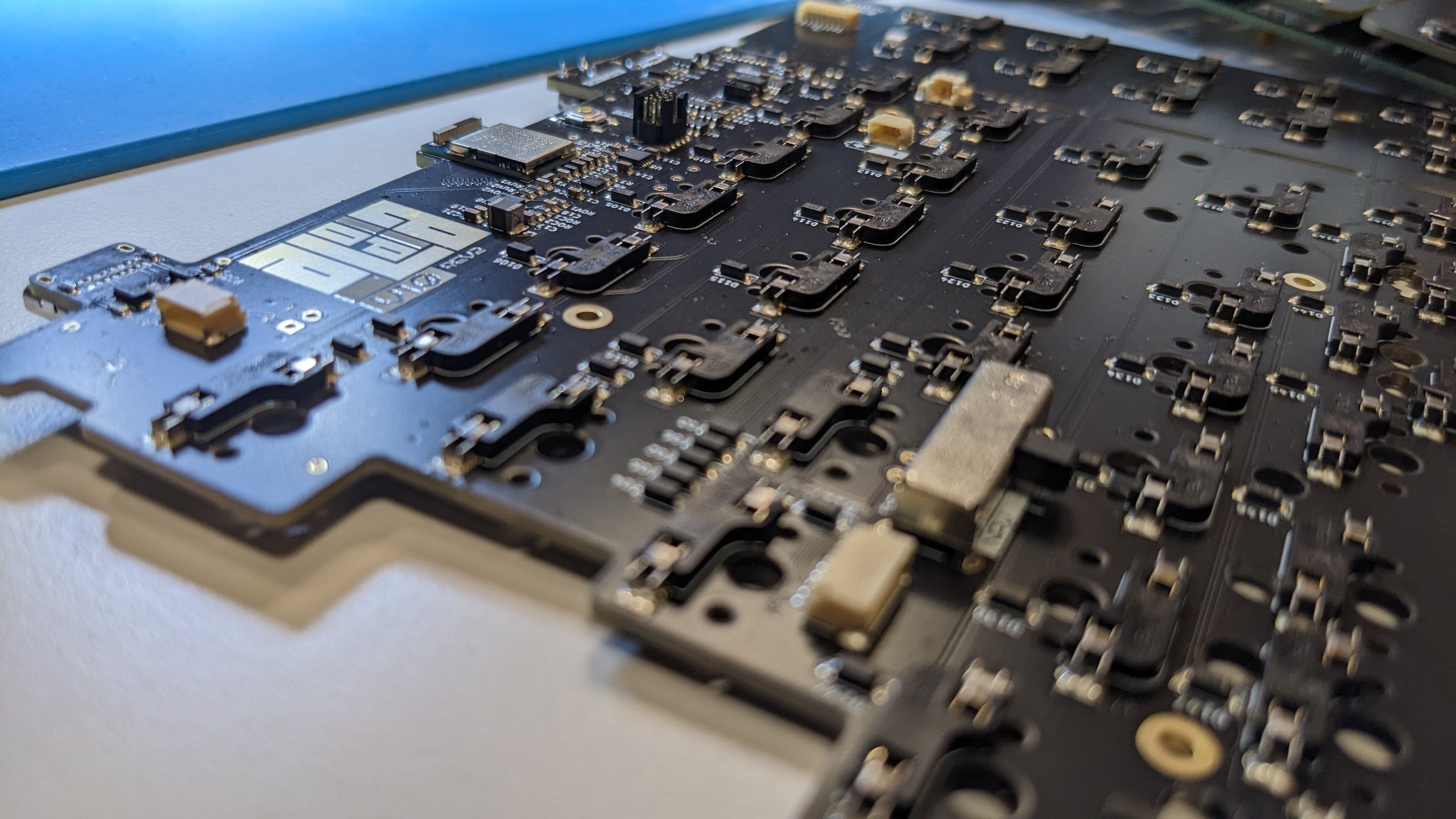
Aloidia: wireless split solar powered keyboard
Aloidia is a staggered, split, fully wireless solar-powered mechanical keyboard with extremely long battery life.
 Nguyen Vincent
Nguyen VincentBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests













 Mattia Dal Ben
Mattia Dal Ben
 Paul Andrews
Paul Andrews
 Bulbul
Bulbul
 Jeff Cooper
Jeff Cooper
Oh myyy, this is a beautiful keyboard. Told myself I was semi-done with this hobby (more-so just focus on customising my already bought keebs and not joining anymore GBs), but if this becomes a group buy....I'm 100% in. Awesome work! Wish I was knowledgeable enough in electronics to create my own keeb this complicated :D