0%
0%
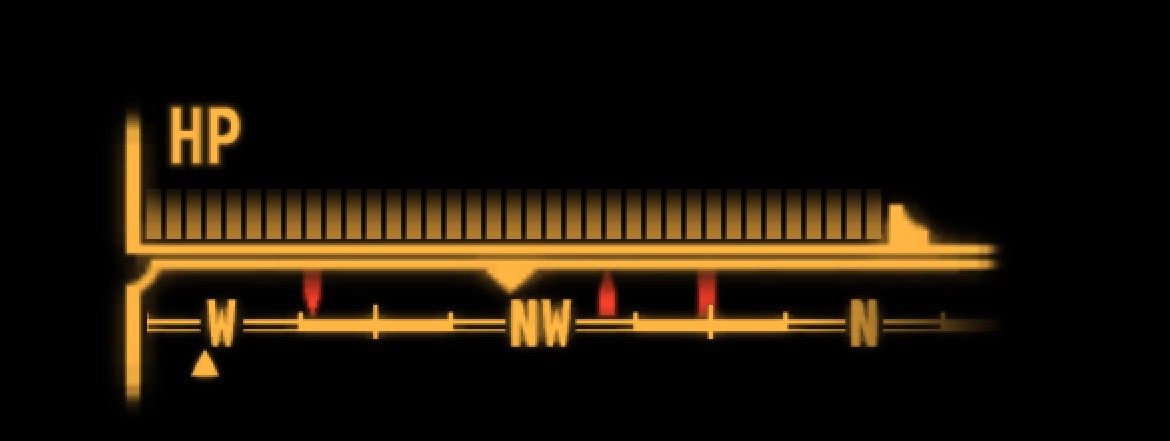
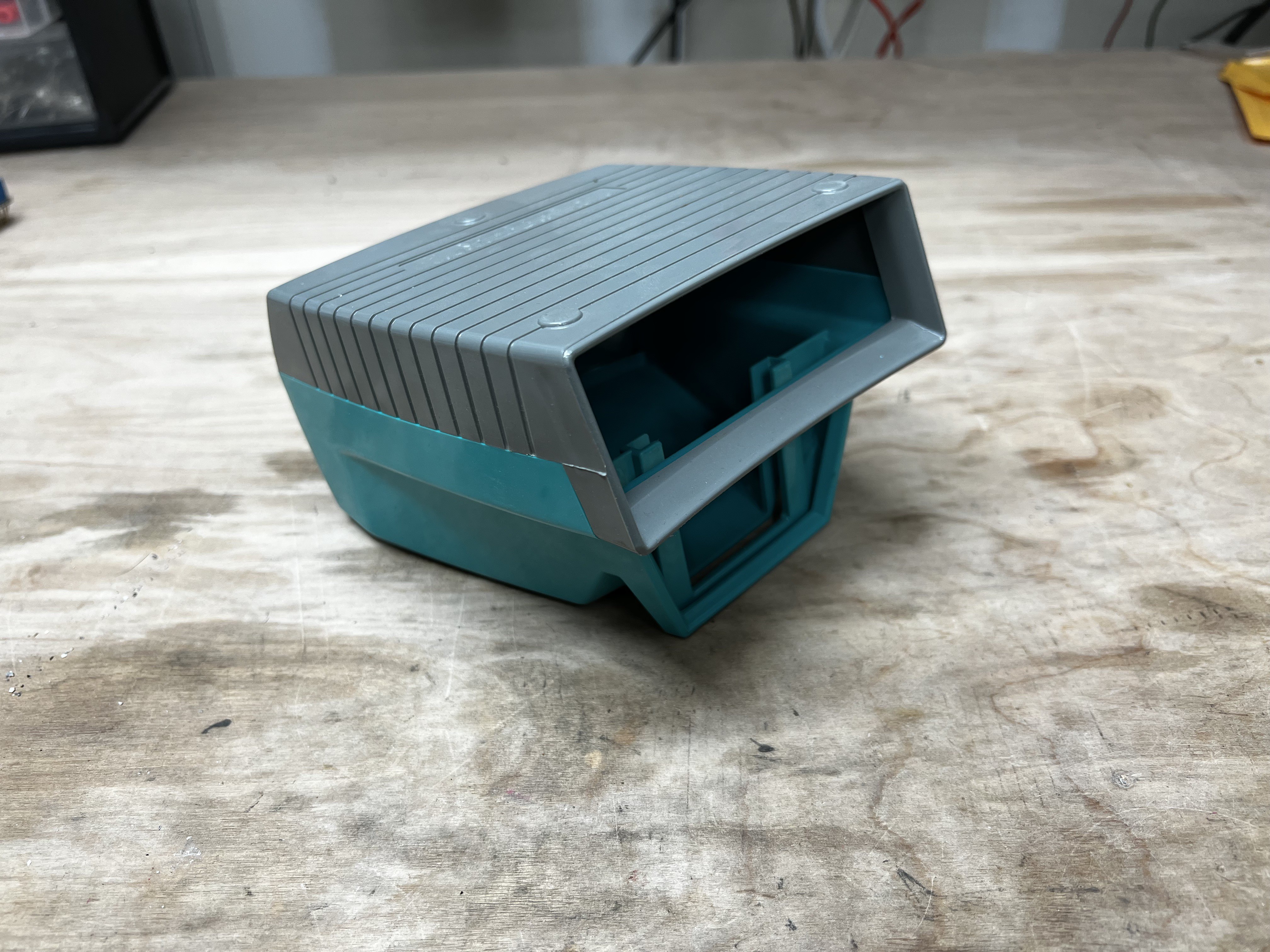
IGV1-16 Car Compass
or: How I Learned to Stop Worrying and Love the Quaternions
 Kevin Santo Cappuccio
Kevin Santo CappuccioBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








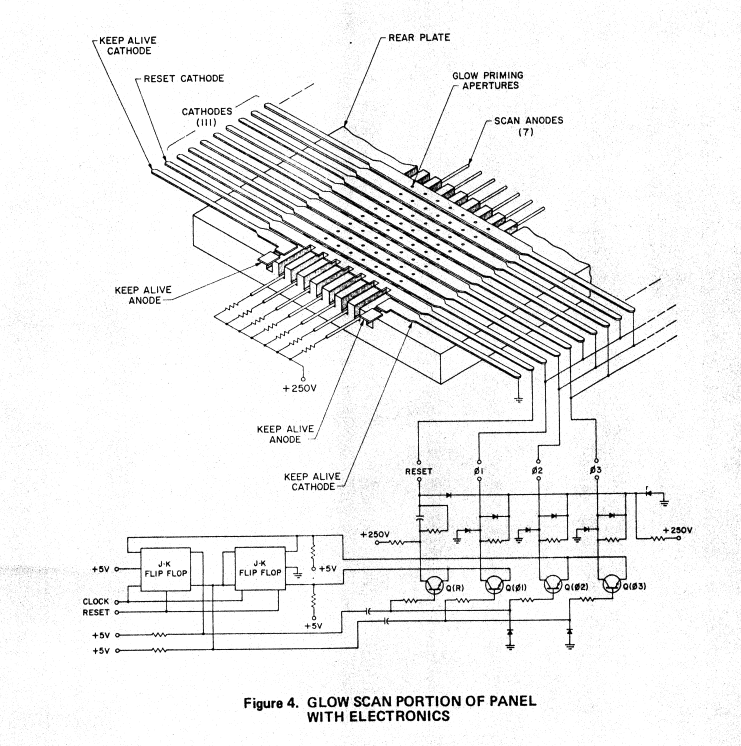
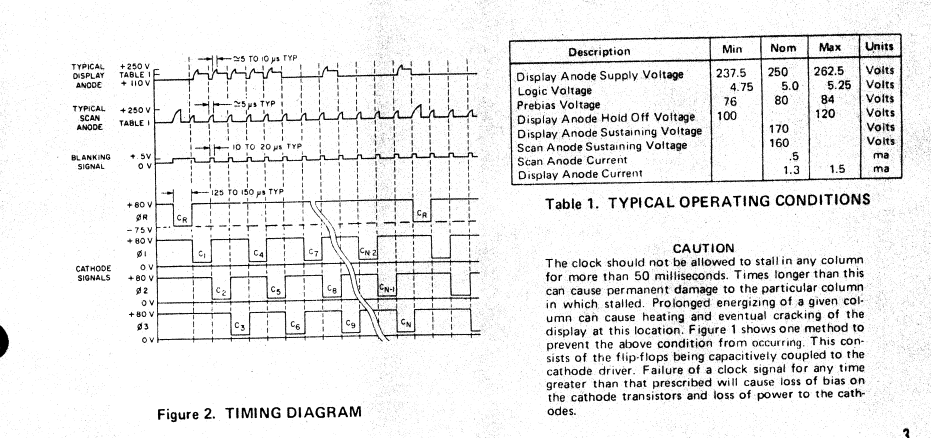
 The Reset (or blank) line can optionally be slightly different (it's not in this project though)
The Reset (or blank) line can optionally be slightly different (it's not in this project though)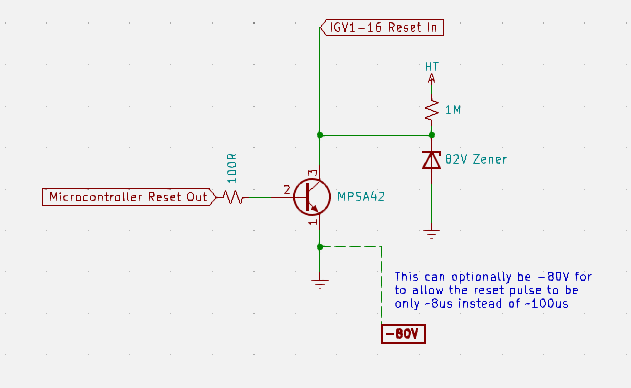



 Jake P
Jake P
 xres0nance
xres0nance
 svofski
svofski
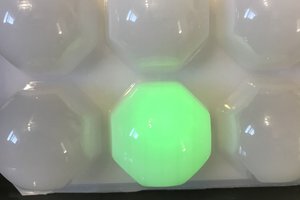
👍 Cool display! Best reason to hack, just for the heck of it. Tempted to get that display model but I promised myself I wouldn't go looking for retro tech before using up what I have in my junk, er spares, box. Looking forward to reading the tech details.