 Andrew Benson
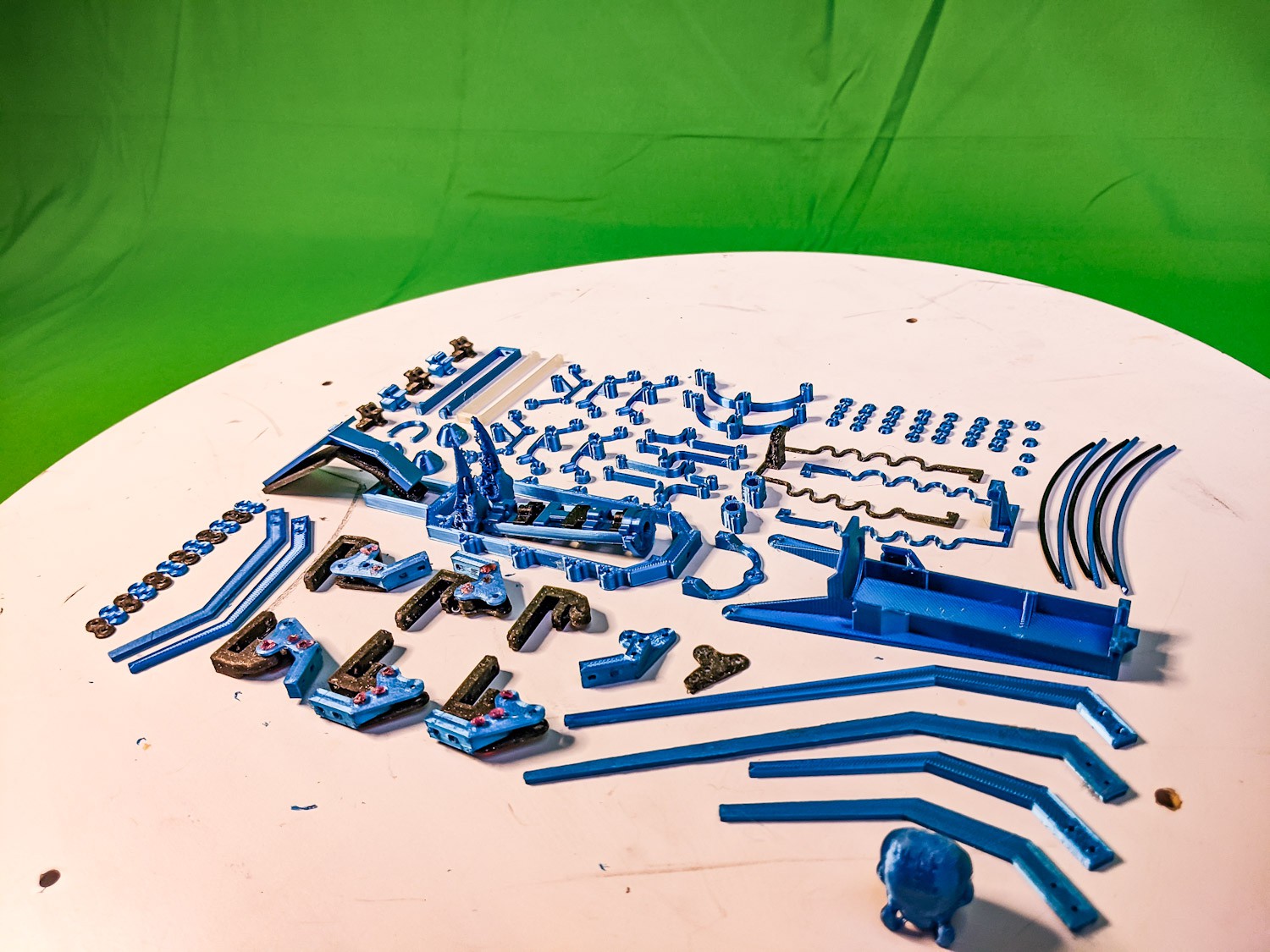
Andrew BensonPractice your robotic design and control skills by building and wrestling robot hexapods. Designed to be affordable with a minimal bill of materials, this project is intended to be an easy place to learn about robotics.
Created with the help of Seeed Studio:
https://www.seeedstudio.com/co-create.html
0%
0%
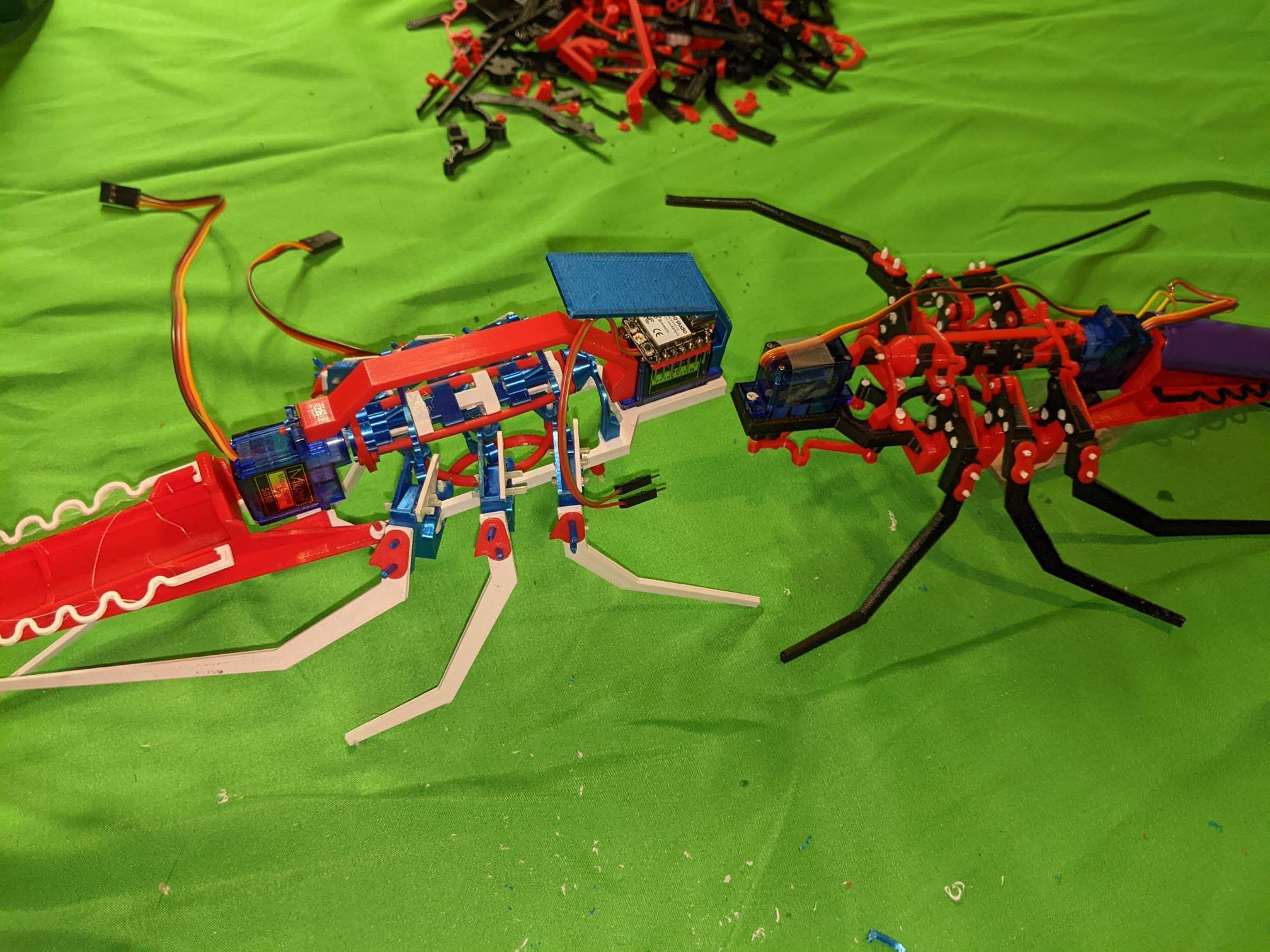
Robo Roach Wrestling
A sumo style wrestling league for hexapod robots
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 deʃhipu
deʃhipu
 HackAtech Industries
HackAtech Industries
 Smalls
Smalls
 ProgressTH
ProgressTH