 Jesse R
Jesse RWorking principle
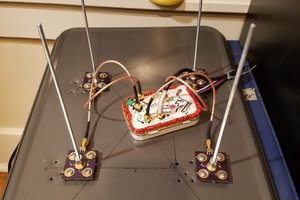
Here's a description of how this works.
- The transmitter sends a radio signal and an ultrasound signal to the receiver.
- The radio signal arrives first, the receiver starts counting from that moment until the ultrasound signal arrives.
- The receiver records the time that the ultrasound signal was received on the right and left receiver.
- The angle is calculated based on the difference in arrival between left and right ultrasound receivers.
- The distance is calculated based on the difference in arrival between the radio and ultrasound.
Here are a couple of animations to help explain:

When the ultrasound signal arrives at the same time to both receivers we know that the transmitter was directly ahead. When there is a difference we can tell if it is to the left or right:
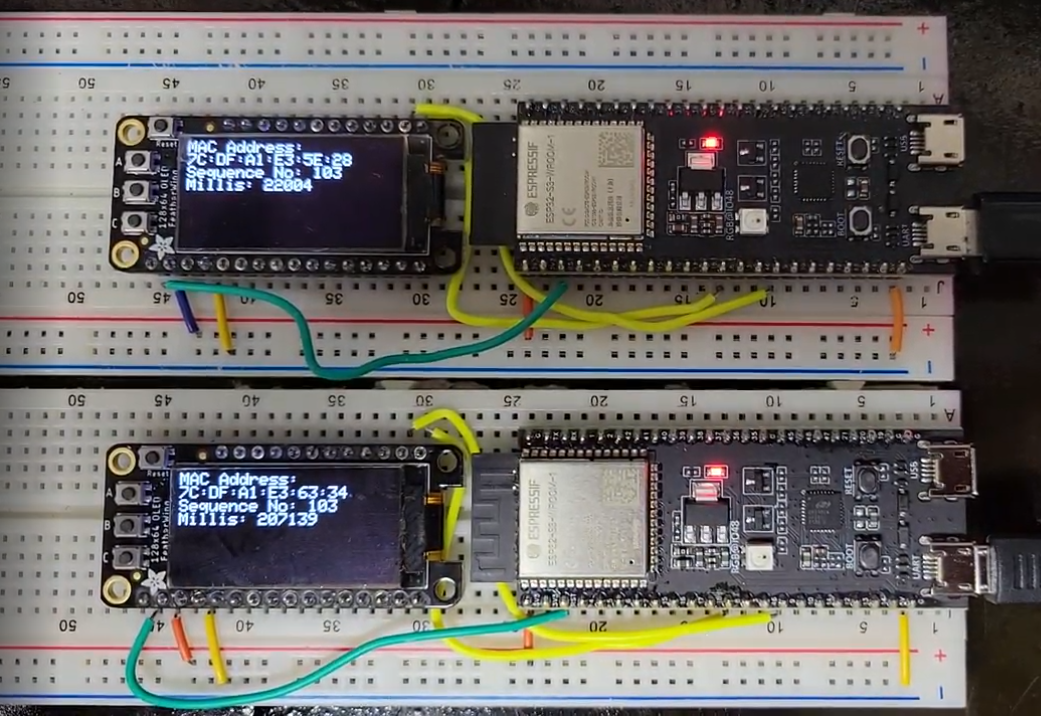
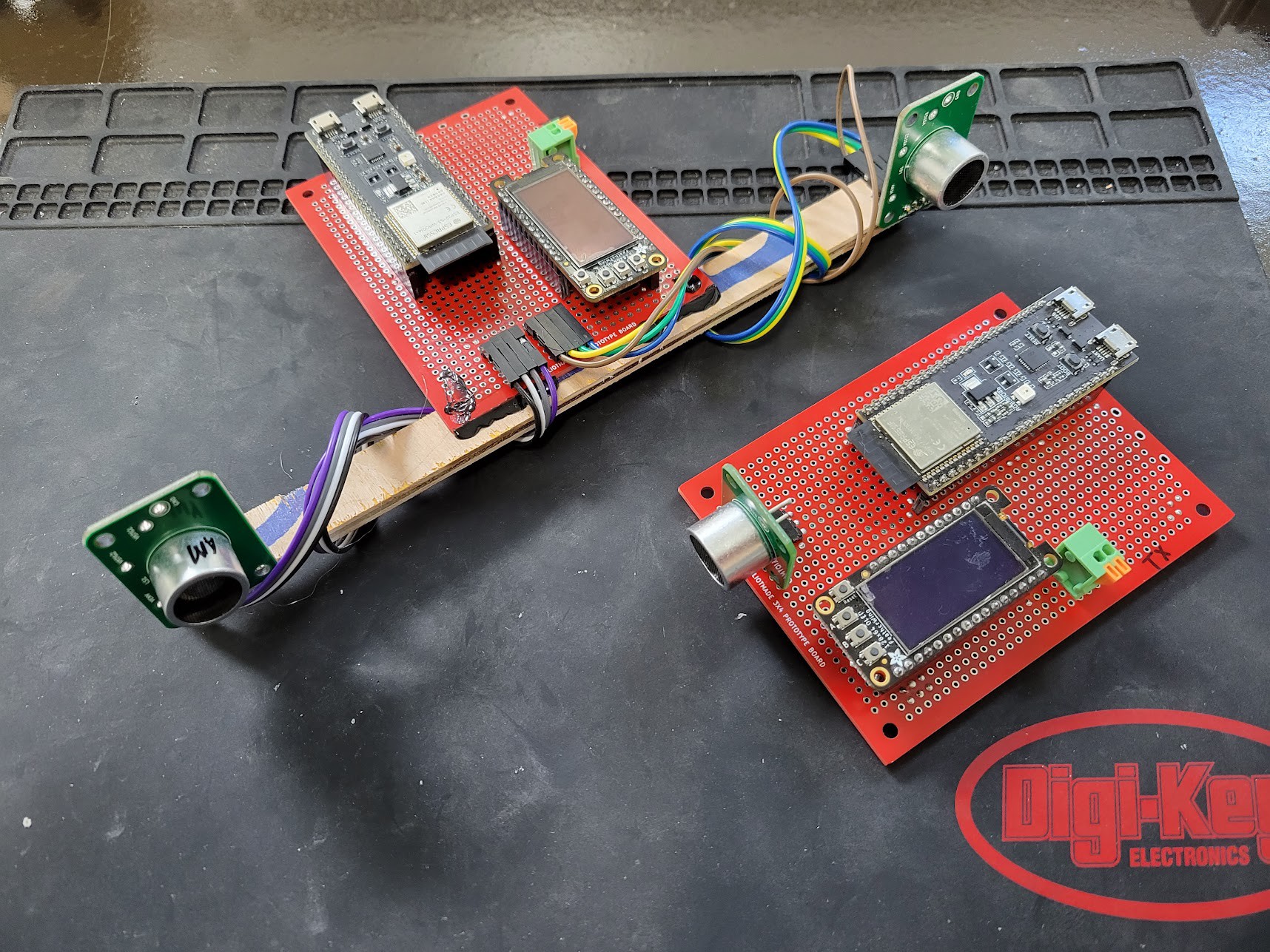
Watch this video of it in action using off the shelf hardware prior to rolling our own:


 Martin
Martin
 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠
 Hugh Brown (Saint Aardvark the Carpeted)
Hugh Brown (Saint Aardvark the Carpeted)
 Igor Brkic
Igor Brkic