 Miguel Wisintainer
Miguel WisintainerThe purpose of this project is to create a robot car with ominidirectional step motor wheels, and replace one of humans by a Robot in this large game board developted in the FURB, Blumenau´s University, Brazil. The control will be using infrared and the most importante, Voice and Image Rekognizer, both services of Amazon.

The first try was to try the robot found in Aliexpress with omnidireccional dc motor wheels, but we got problems with torque at low speed, then we have to up speed, but had problem too with innercial and many of times no precision on infrared sensor reading, because cross to fast the black marker on game board, and main problem, the dc motor whistles
look :(

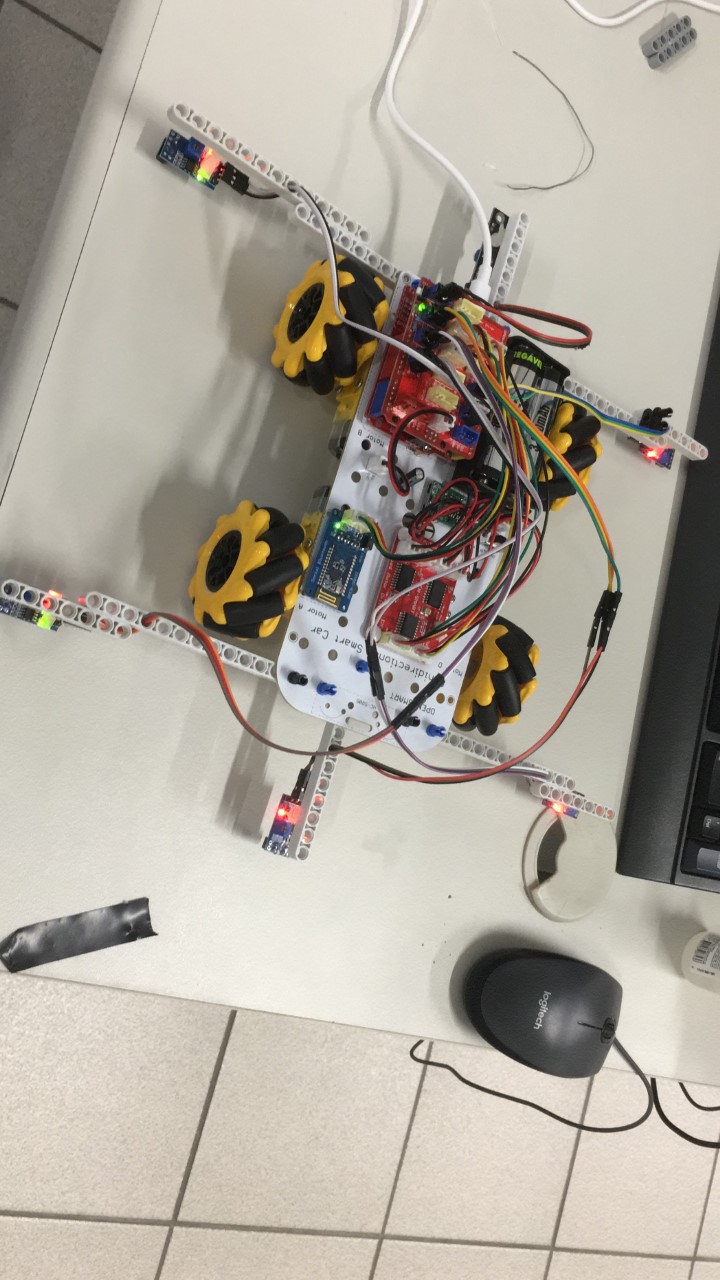
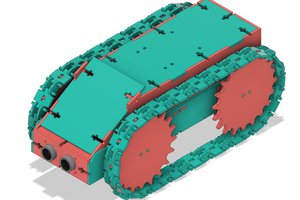
Now with Step Motors :)
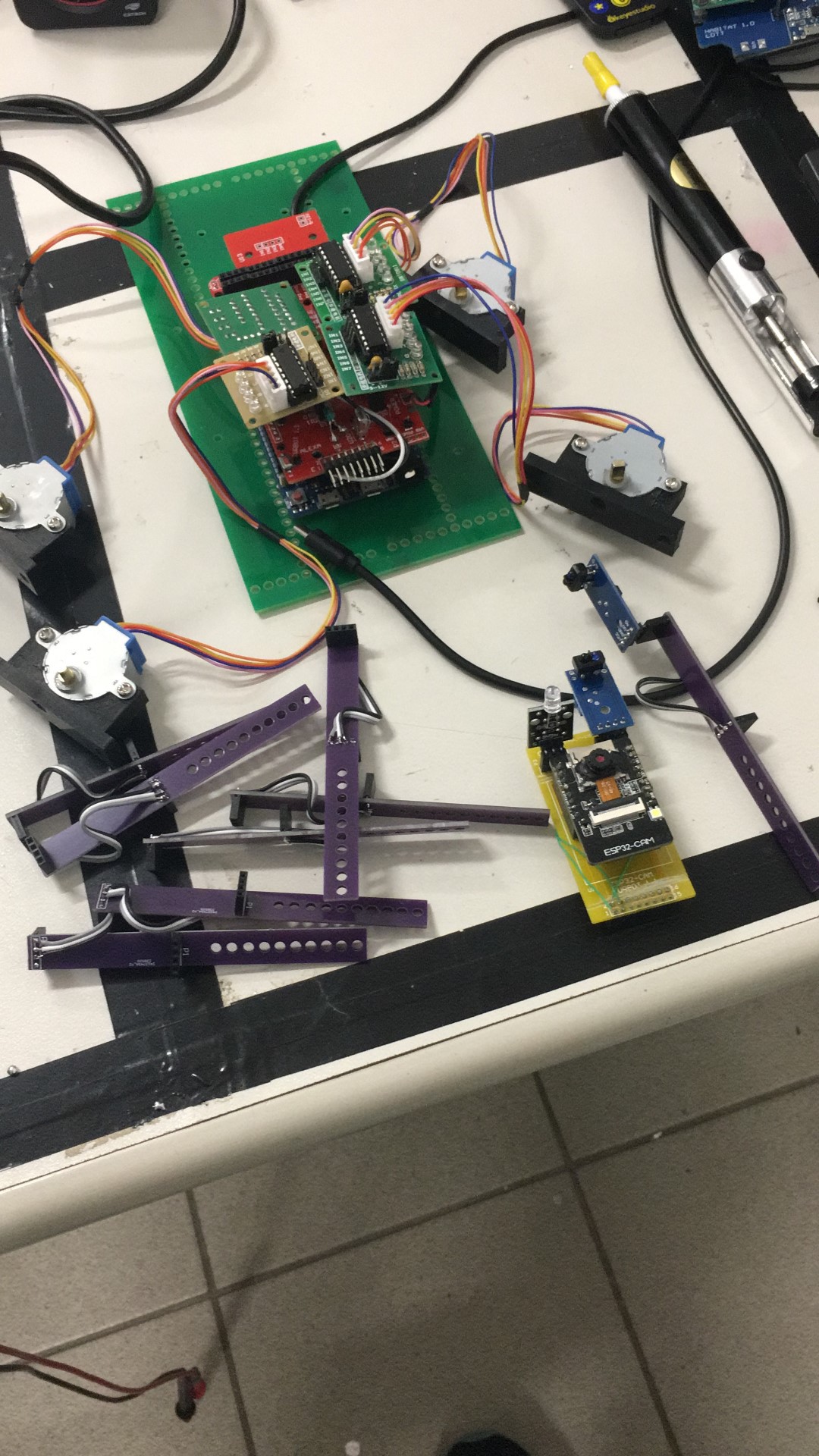
Tests with Step Motor
We had to:
-replace the the step motors to move the robot from one rectangule to another, having precision with the help of 6 infrared sensors and step motors
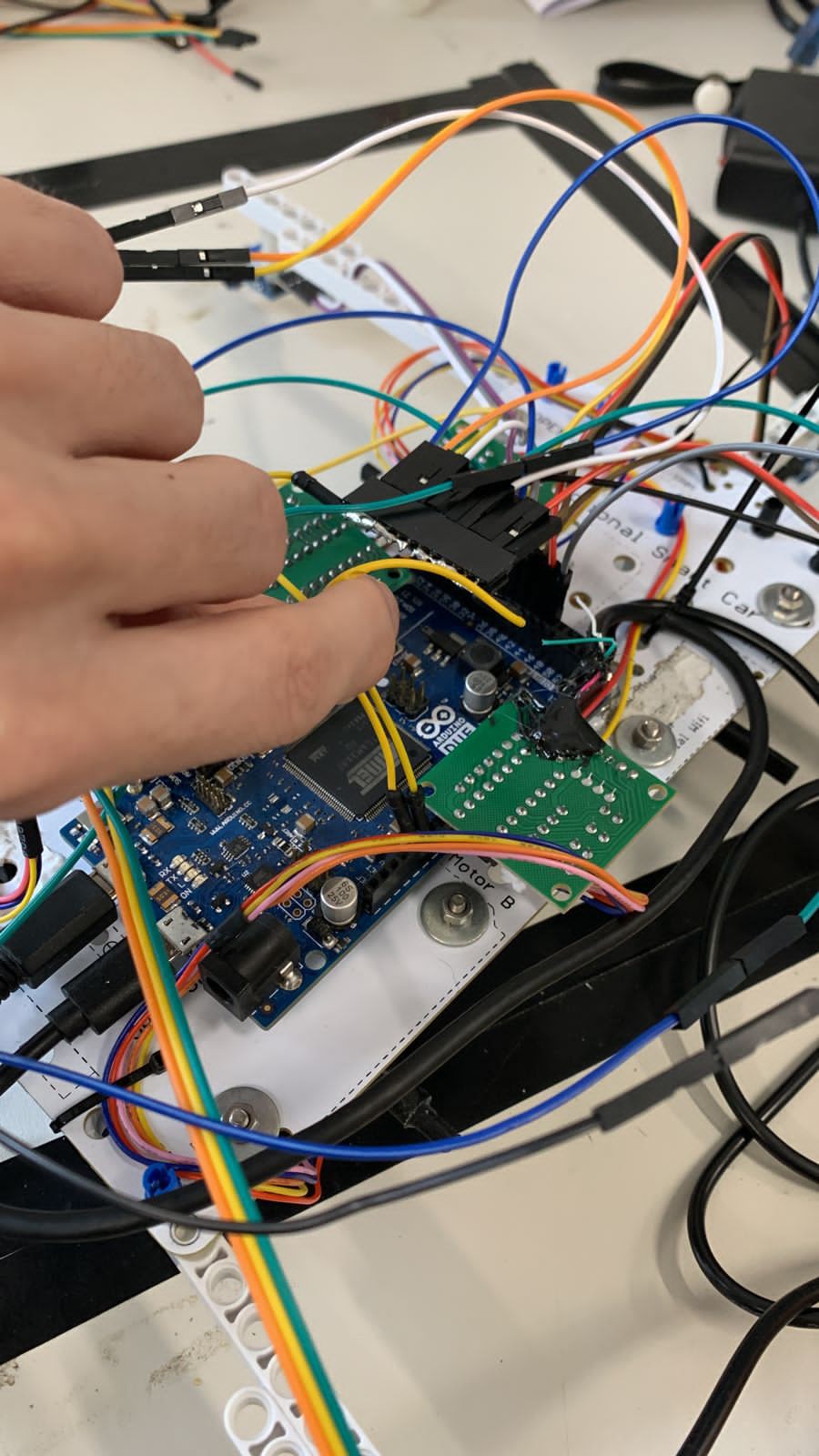
-replace the Arduino Uno by a Arduino Mega ARM to get more GPIOS to control the 4 step motors and make the reading of 6 infrared sensors
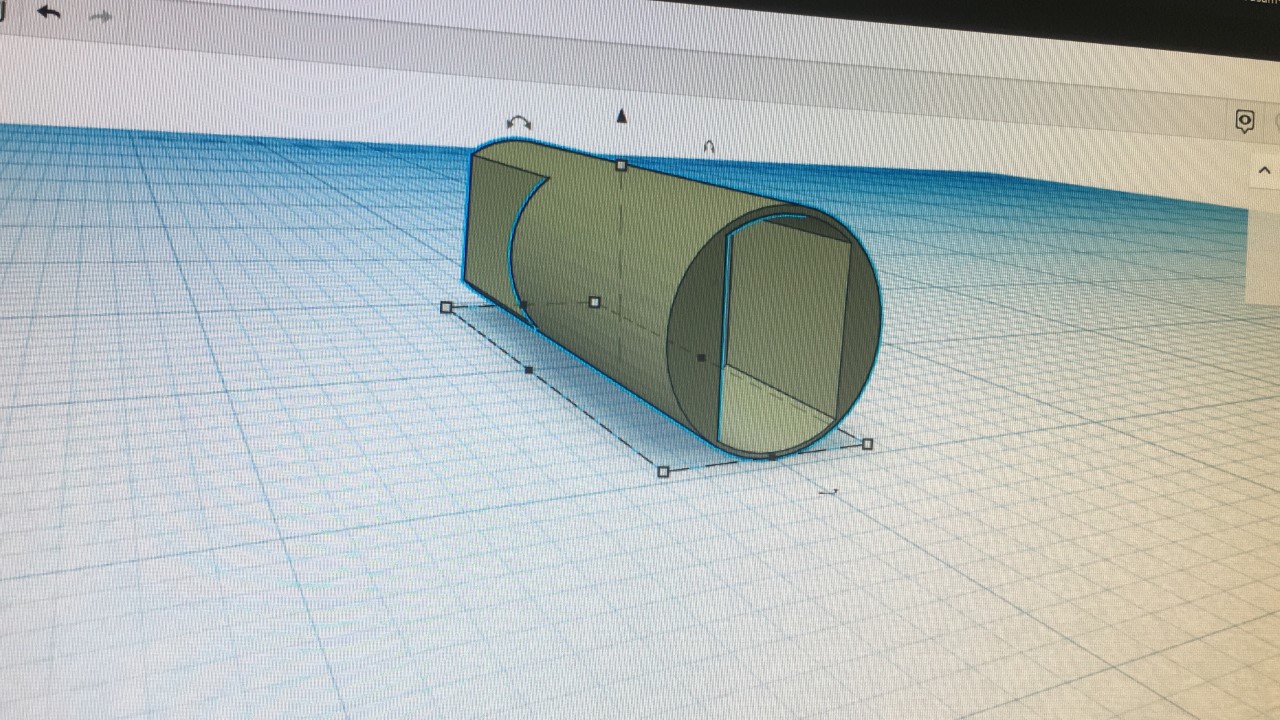
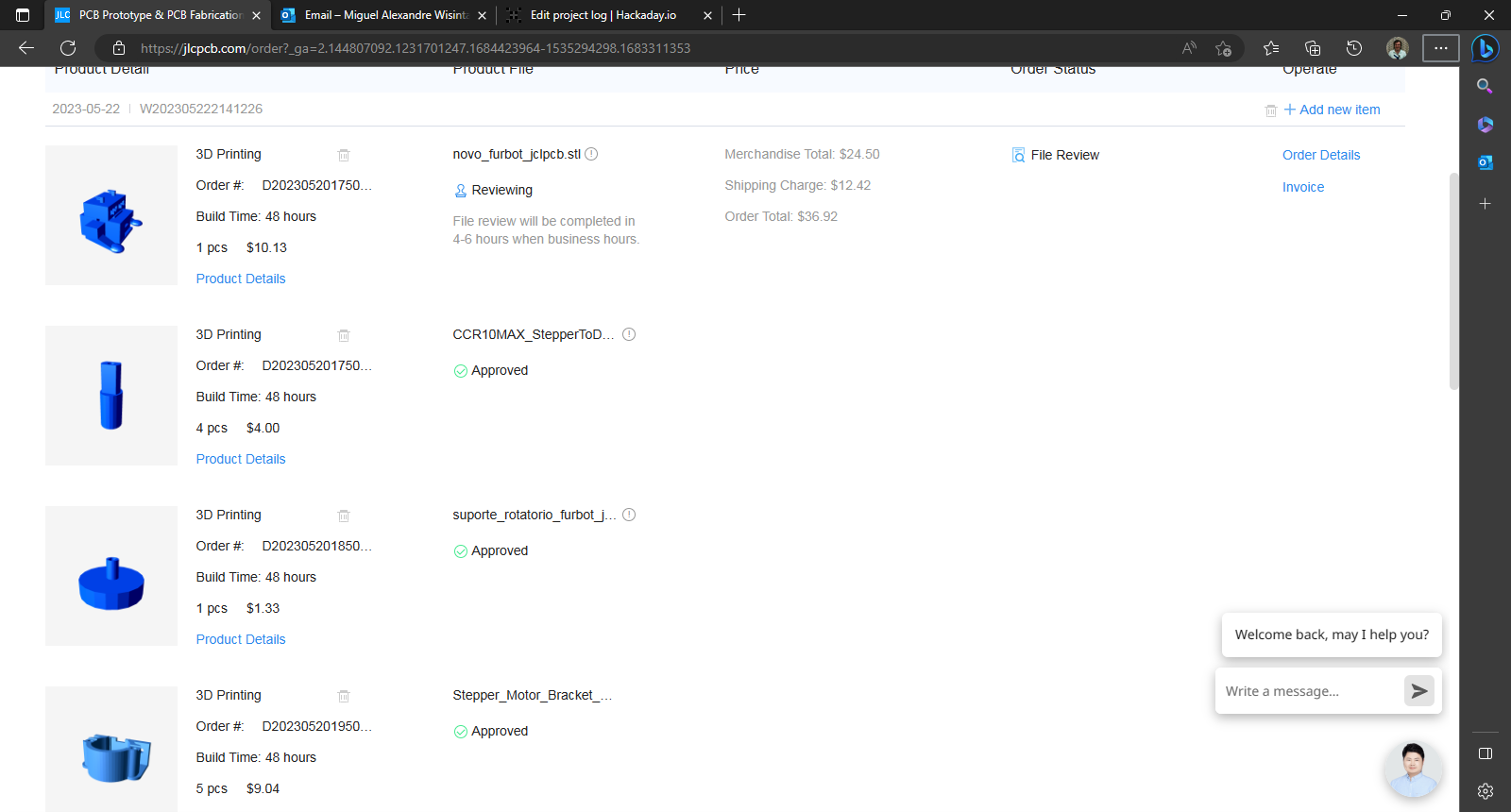
-build a 3D support to motor on chassis and axis converter to connect the step motors to the wheel
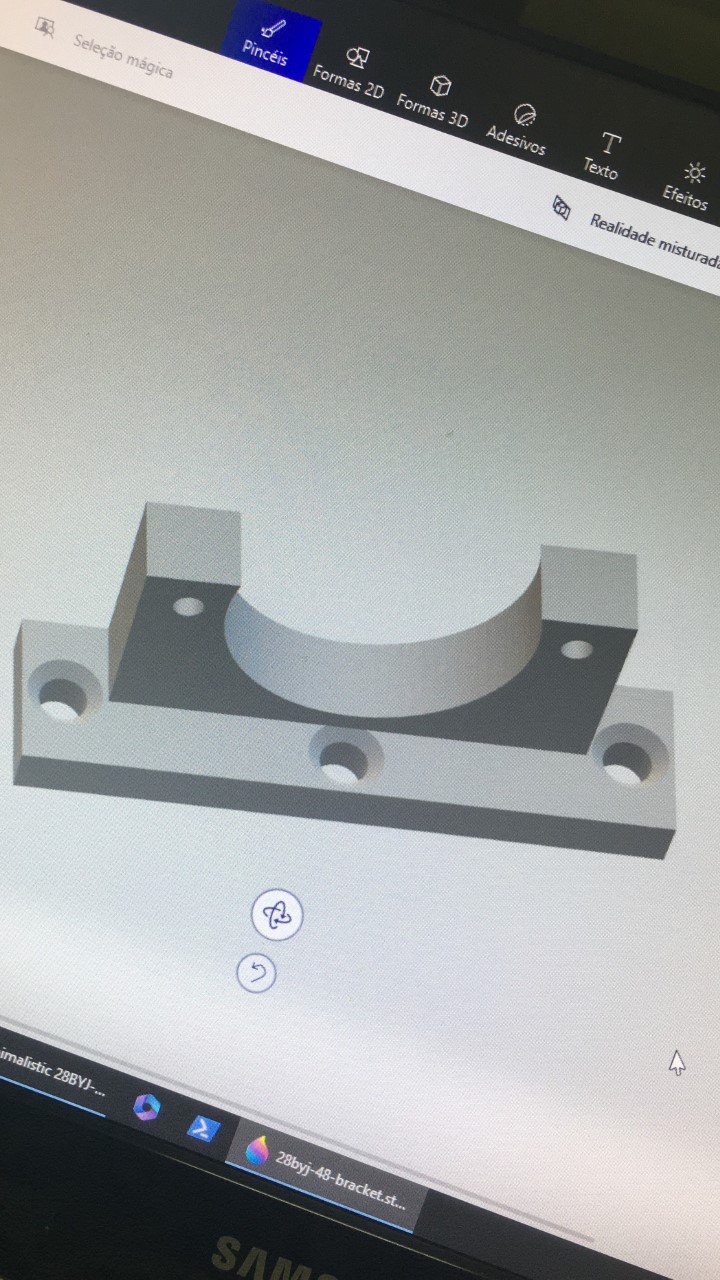
-build a prototype of a square using the insulating tape on the table to make tests with step motor wheels, to test speed and torque. We used 5V step motor model 28byj.
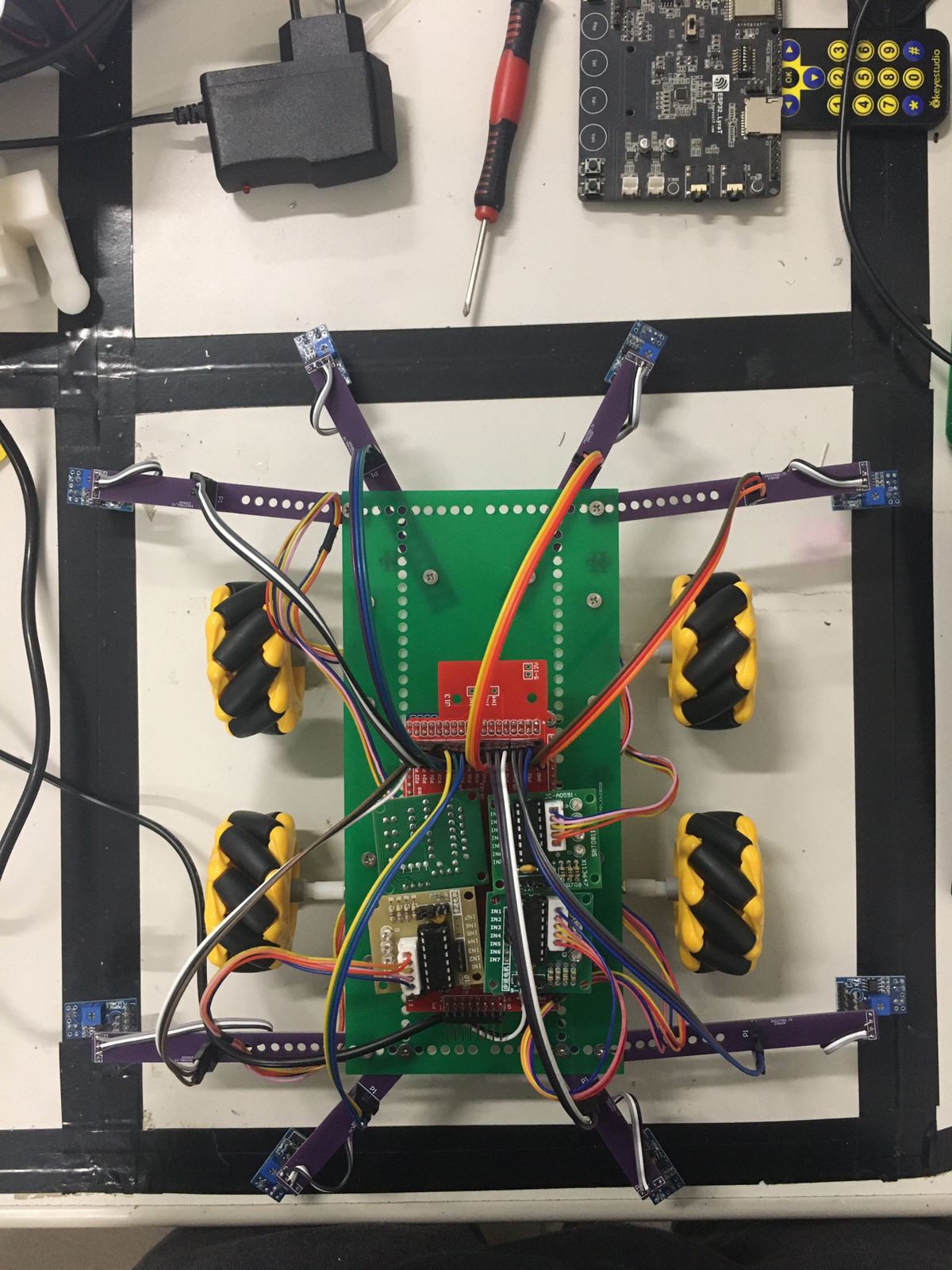
After the assembly of step motors and sensors:
The commands to the robot can to be sent in various ways:
- remote control (IRDA)

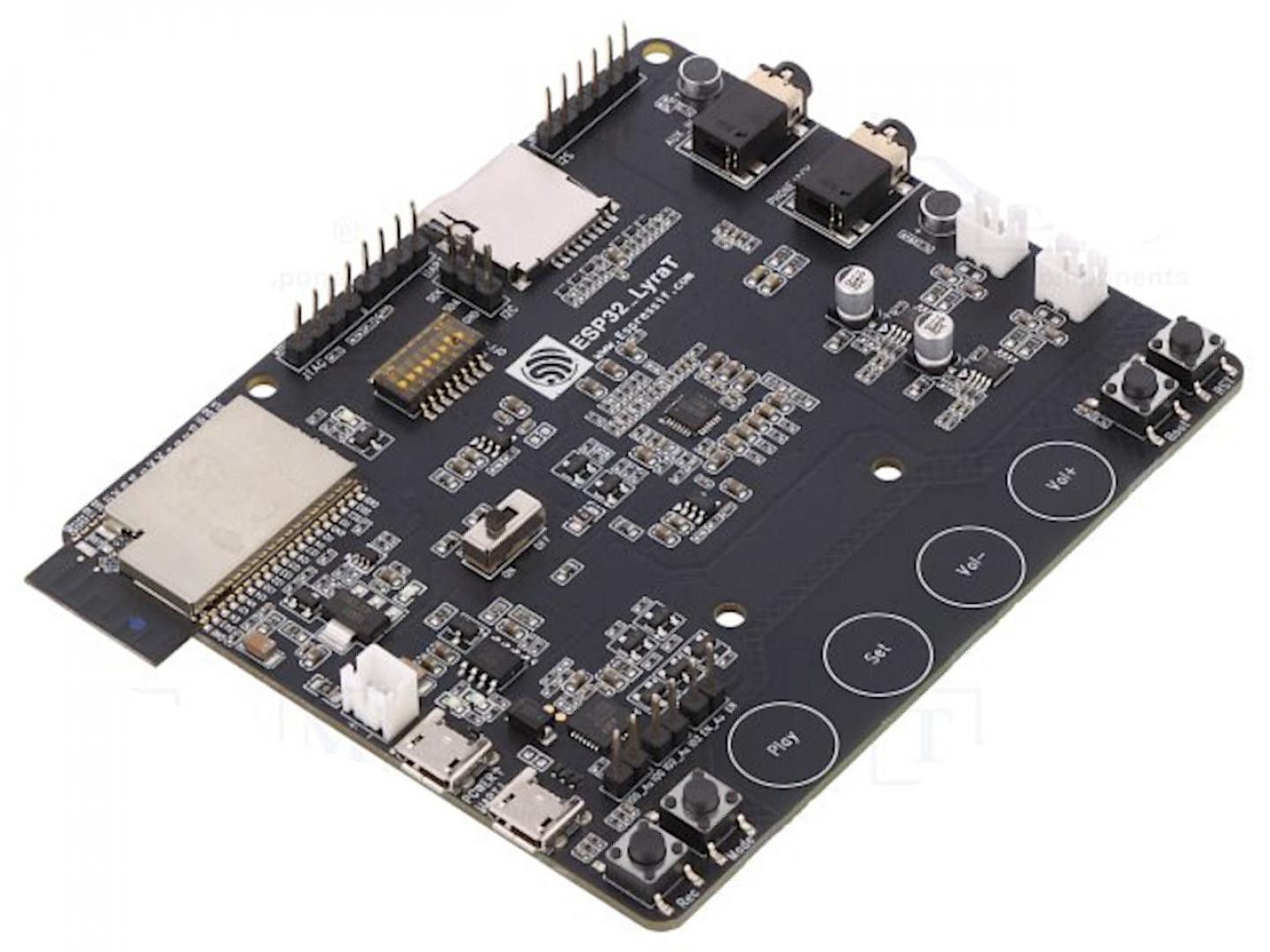
-voice commands from the Alexa assistance (Alexa "Echo" on ESP32 LyRat)
- ESP32CAM connected Amazon Recognizer (to detecting text on original instructions Cards) and also via socket from PC after get streaming image of gamed board and processing it.
"Alexa, my little Robot"
Then
"Robot, move to west"
"Robot, move to east"
"Robot, move to north"
"Robot, move to south
and instructions cards

Cards movements that the robot detects (Amazon Rekognizer)
"move South"
'"move West"
"move east"
"move north"
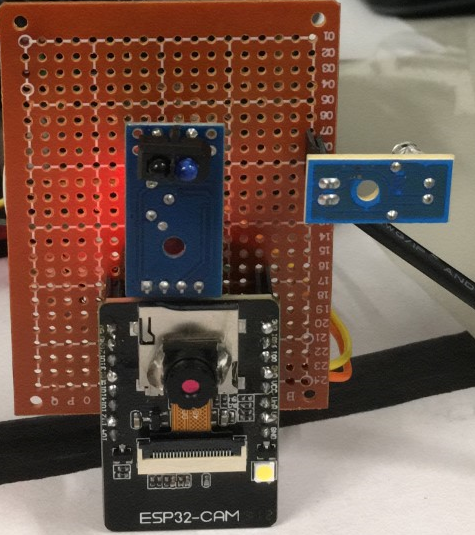
Proximidy Card Detect, infrared transmitter and ESP32 CAM
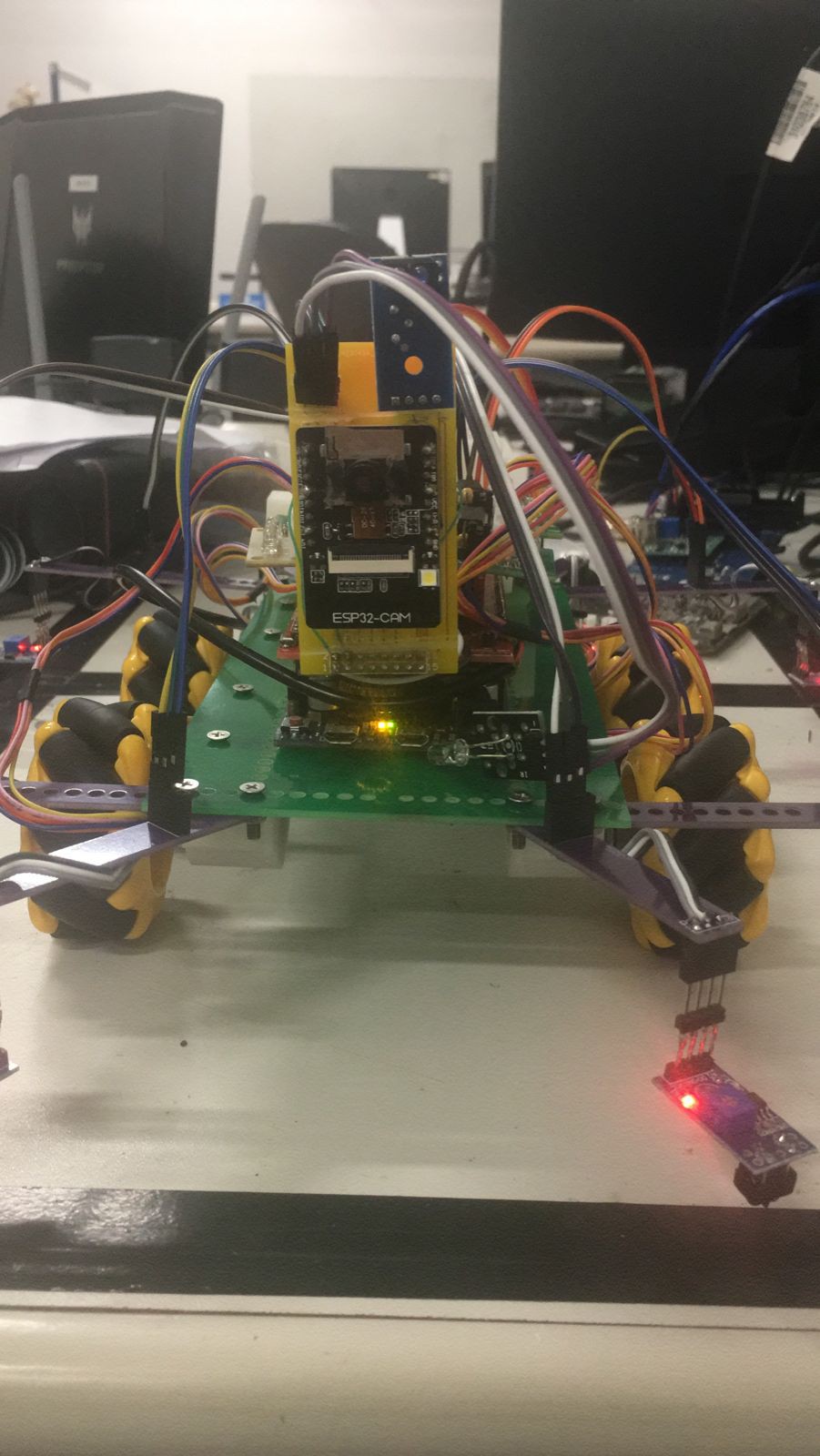
Updates of prototype:
Hardware
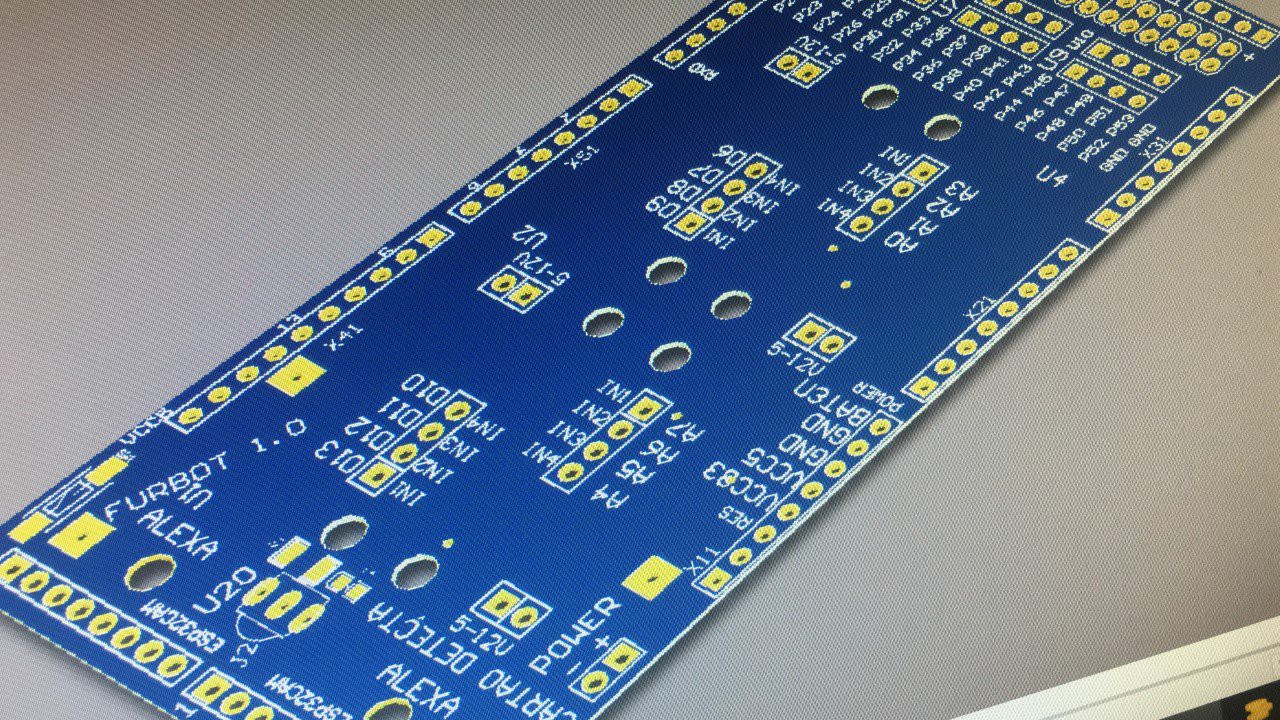
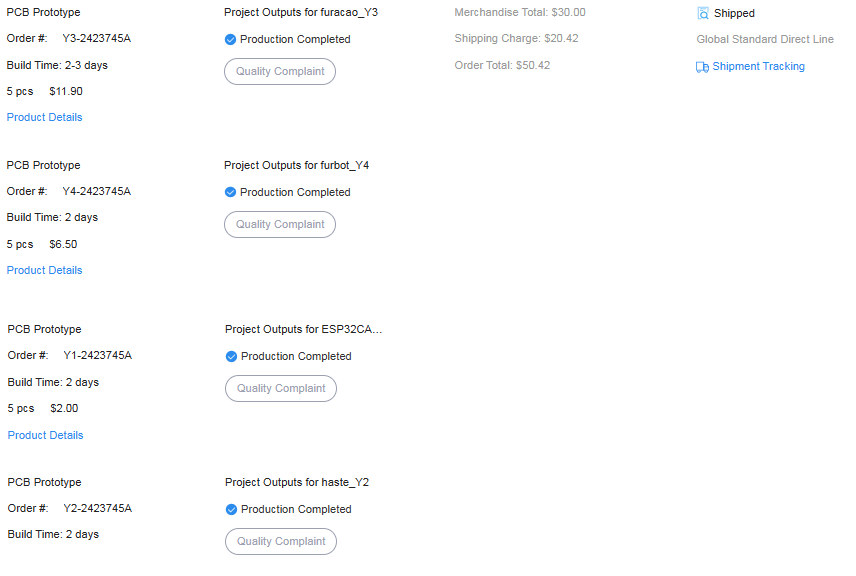
-build a new chassis that use the aliexpress original and defines the news holes positions and support to Arduino Mega, ESP32 CAM, sensors support and step motors and finally the Lyra T Amazon "ECHO"
-replace the Arduino Mega ARM by a Arduino Mega 2560
-add more 2 infrared sensors to get more precision in all movements, because sometimes the robot skids a bit and need to make adjust on stop position
Software
-ESP32CAM Software access to AMAZON AWS IoT Core, AMAZON Rekognizer, Infrared and finally communications with Arduino Mega 2560
-LyRa T ESP32 Software (similar to Alexa Echo)
Wheels

Last update before Add the Lyra T and speakers on Robot and make finally the Chassis and Battery charger
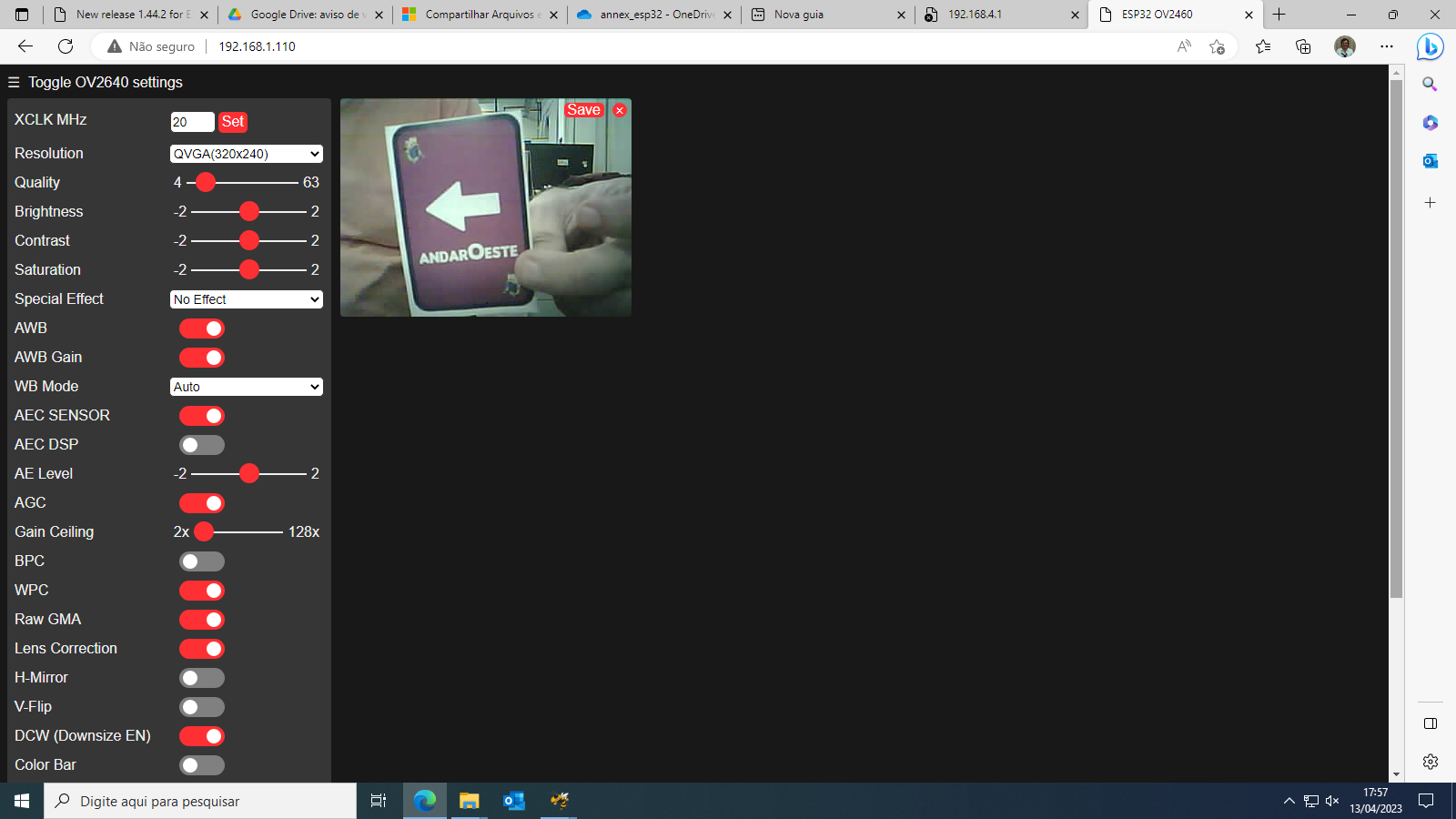
This is what the robot see :)
See more
Amazon "OCR"
Alexa....
And wear the Robot :)


 bigbat
bigbat

 Matthias Kubisch
Matthias Kubisch