 Hubert
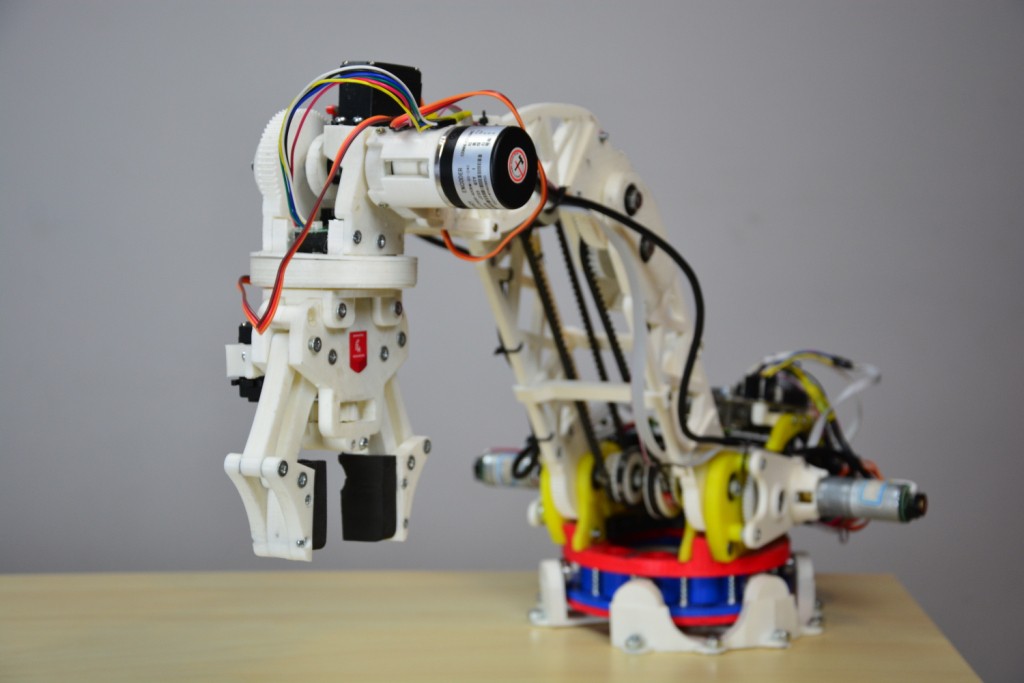
HubertProject was designed and created by Mikowhy95, zaba963 and Hubert424 . The controller used in hRobot is a Husarion CORE2 in a configuration with a Raspberry Pi. The arm uses DC motors, servomotors and quadrature encoders. In files you can find all parts in STL format ready to print. Video shows very first version of our robot.
As you can see not everything is working right now. For example we have to recreate the gripper because stepper motor used in this version is not strong enough.We are still developing a software but it can take some time, to make this fully functional. That's why we haven’t shared a code now. We will publish code on github.com, and we hope people around the world will join our project!


 Owen Trueblood
Owen Trueblood
 Joshua Elsdon
Joshua Elsdon
 Kenny.Industries
Kenny.Industries
 Les Hall
Les Hall
The arm could become a lot stiffer if you added some diagonal cross beams on top and bottom of the arm. As it is right now you only have two time the strength of the side walls instead of the stiffness of the full width. It is even visible in the video that the arm flexes when moving left to right. Even beams much thinner that the ones in the side walls could easily prevent that.