 Hubert
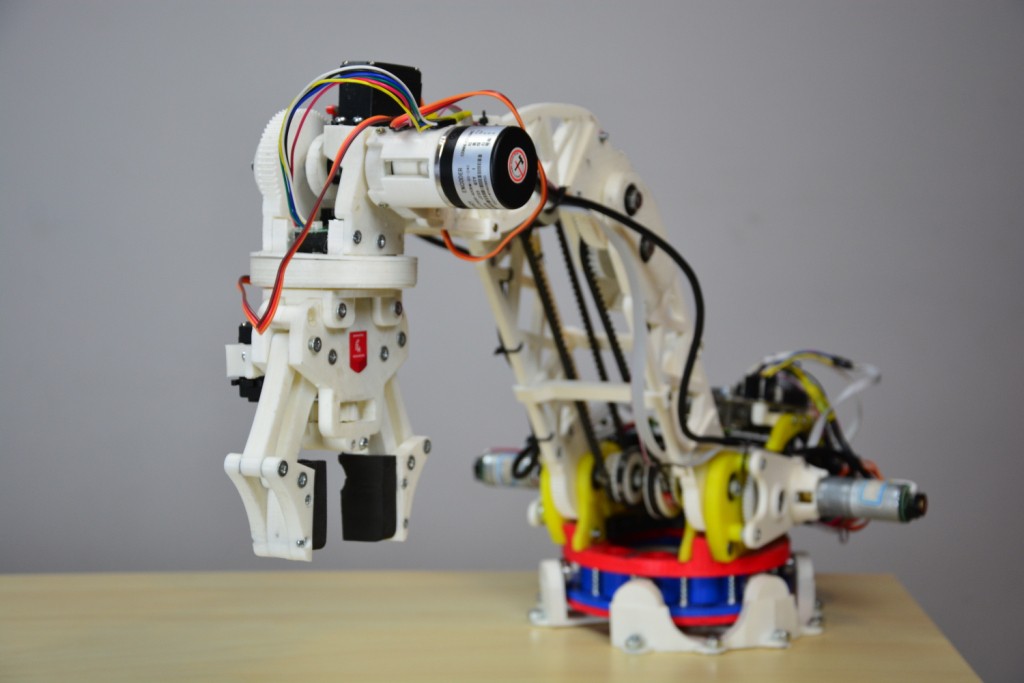
Hubert Last time we described problem we have to deal with during creating hRobot. We fixed most of them and we are ready for a little demo. Video below show one of possible use cases :). It is of course much more universal. Find out for yourself.
Robot uses joint's interpolation while moving from one place to another. Implementation of this part of code was quite difficult and really time-consuming. Interpolation allows hRobot to move more smoothly.
On https://github.com/husarion/hRobot you can find the last version of working software. It will be improved in the following weeks, but even now it’s stable. We are going to add cartesian interpolation in the next weeks.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.