0%
0%
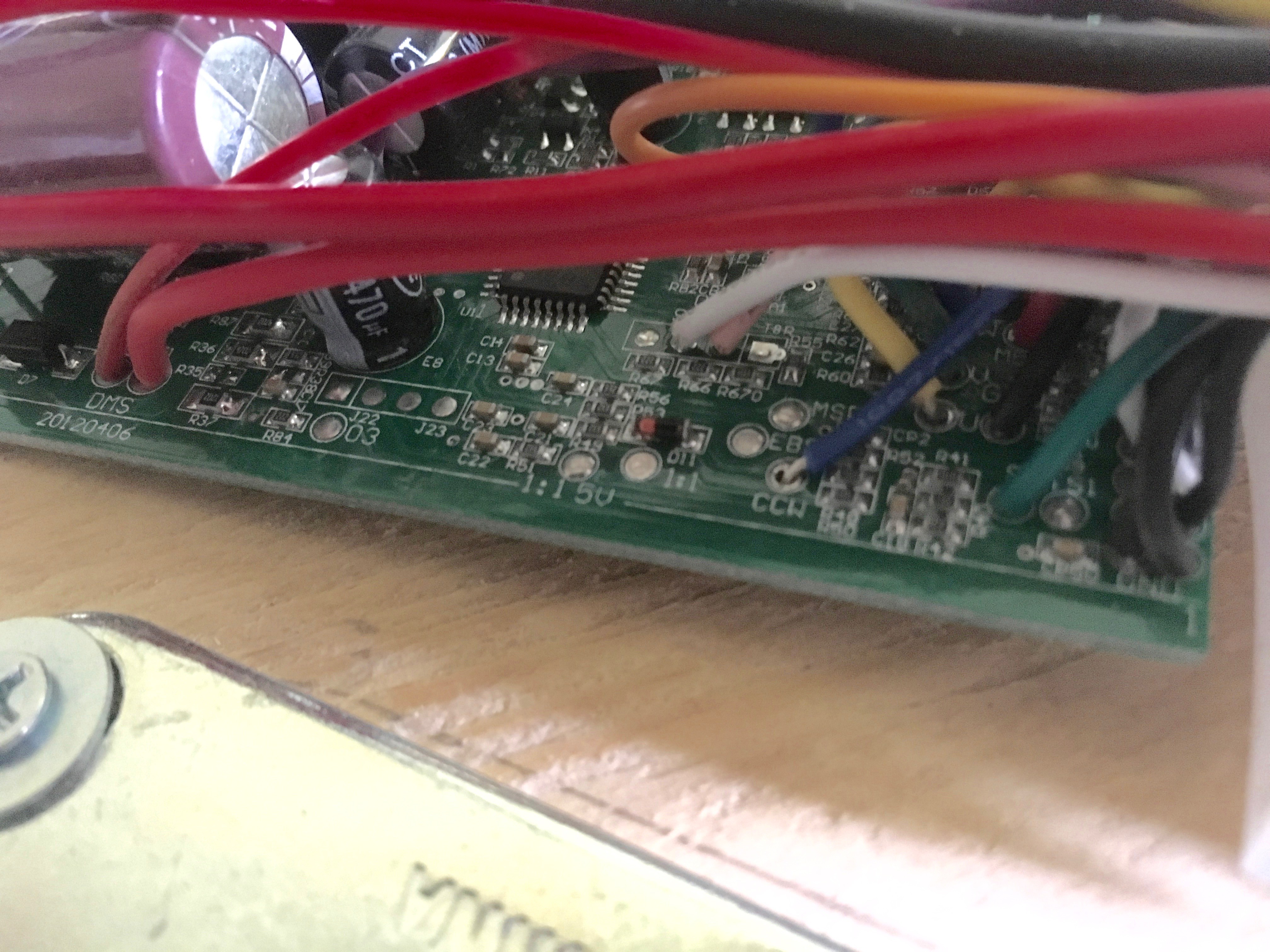
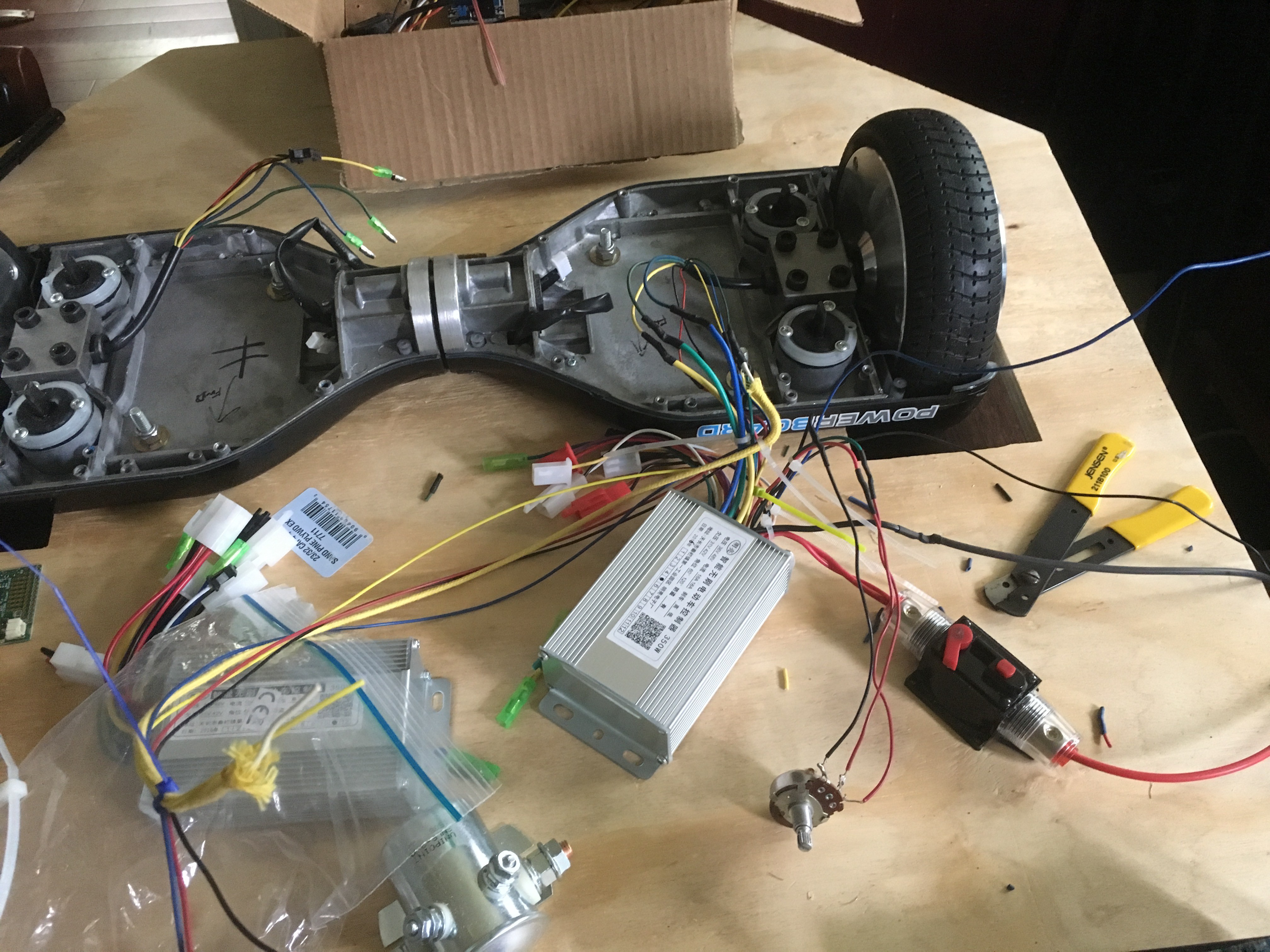
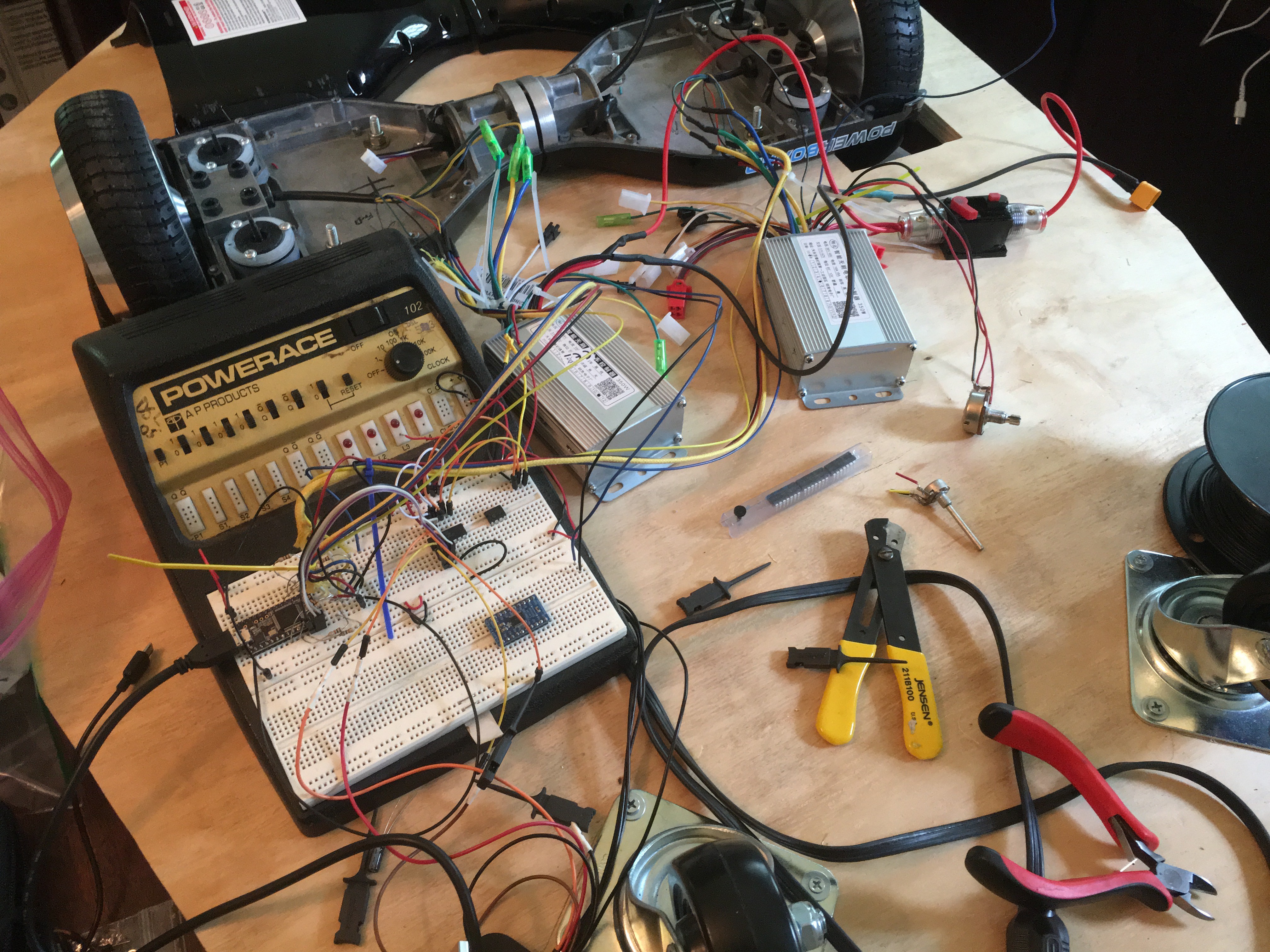
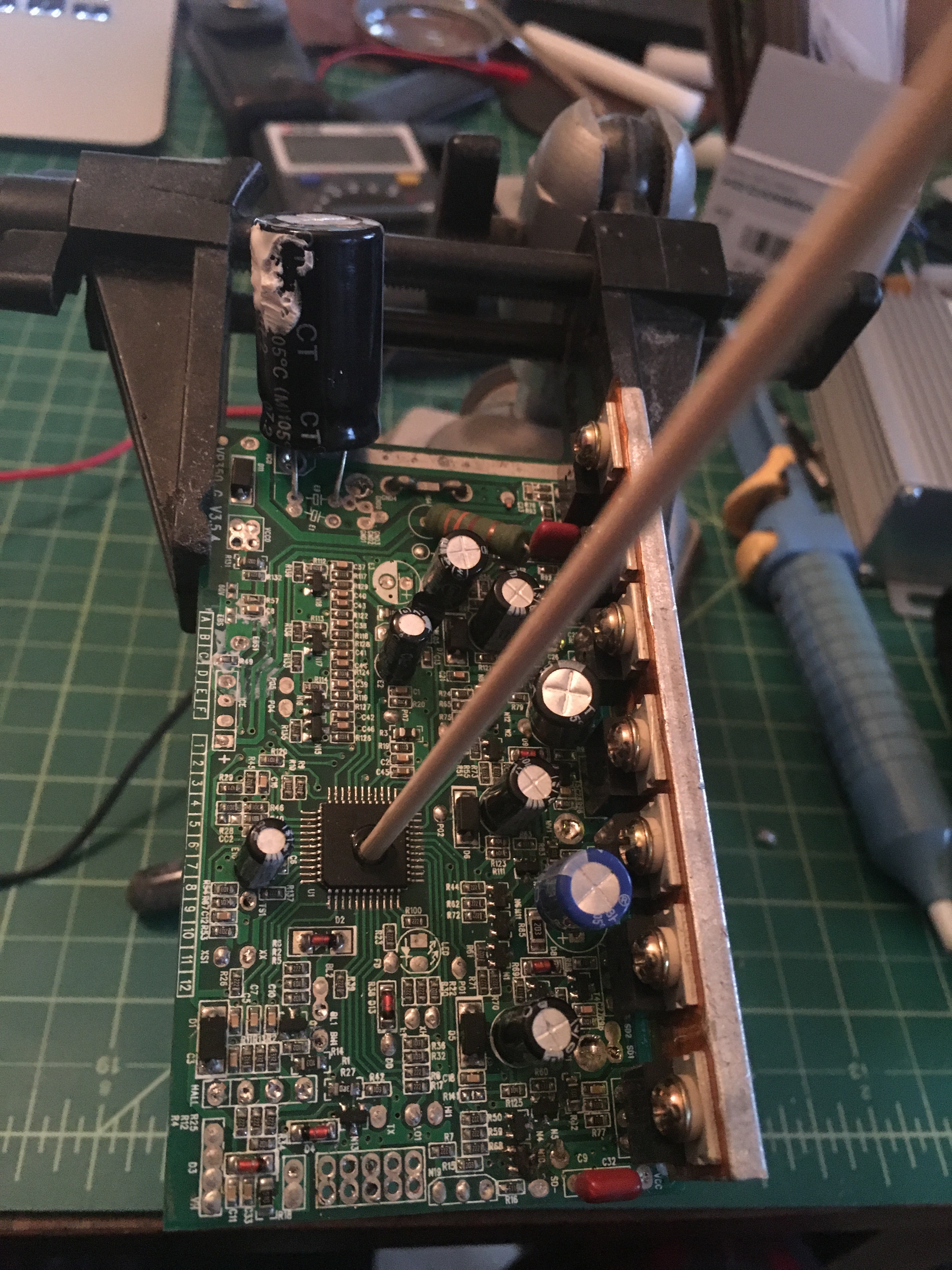
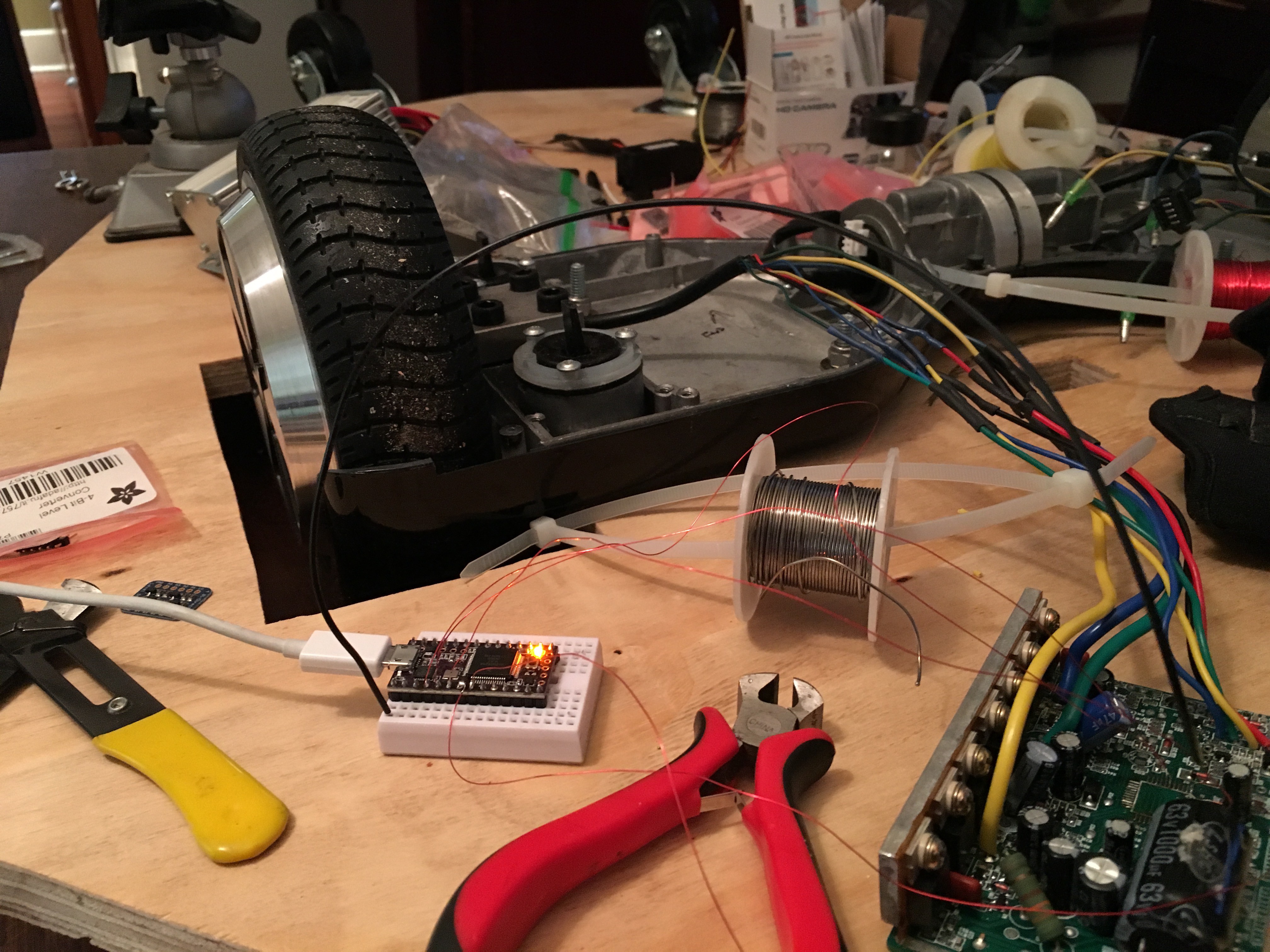
Reverse Engineering: Brushless DC Motor Controller
With a pile of BLDC controllers lying around, and none that do exactly what I want: better to re-use the parts than start over from scratch!
 Jorj Bauer
Jorj BauerBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Scott Duckworth
Scott Duckworth
 Jbarlow1007
Jbarlow1007
 Jim Heising
Jim Heising
 TK
TK
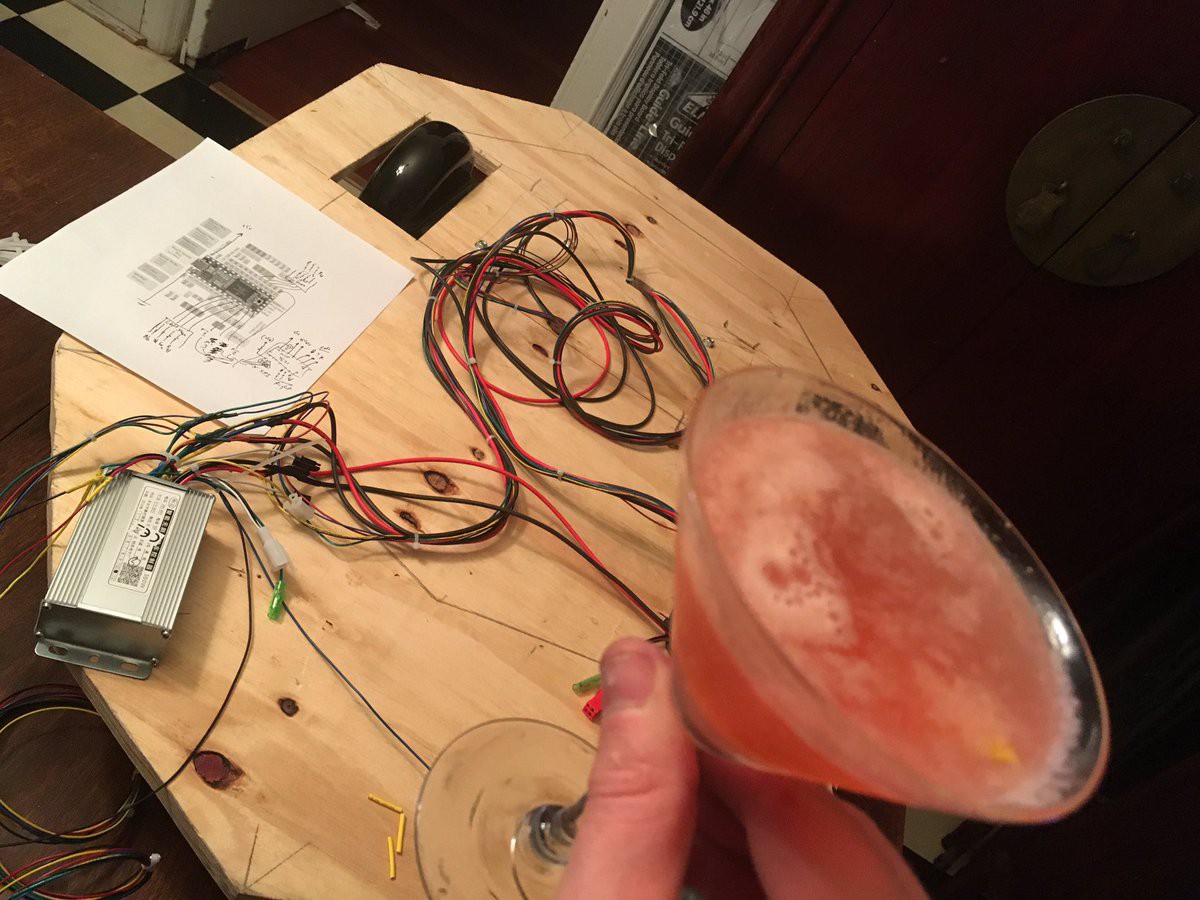
LOL! Don't drink and solder. And don't drink and code, however less fatal :D
I'm working on a speed pedelec, 500W on 36V, looking for some usefull info. Your blog is at least very recognisable!, thnx!