YJ Kim
YJ Kim-
User interface configuration
03/05/2017 at 08:34 • 0 comments![]()
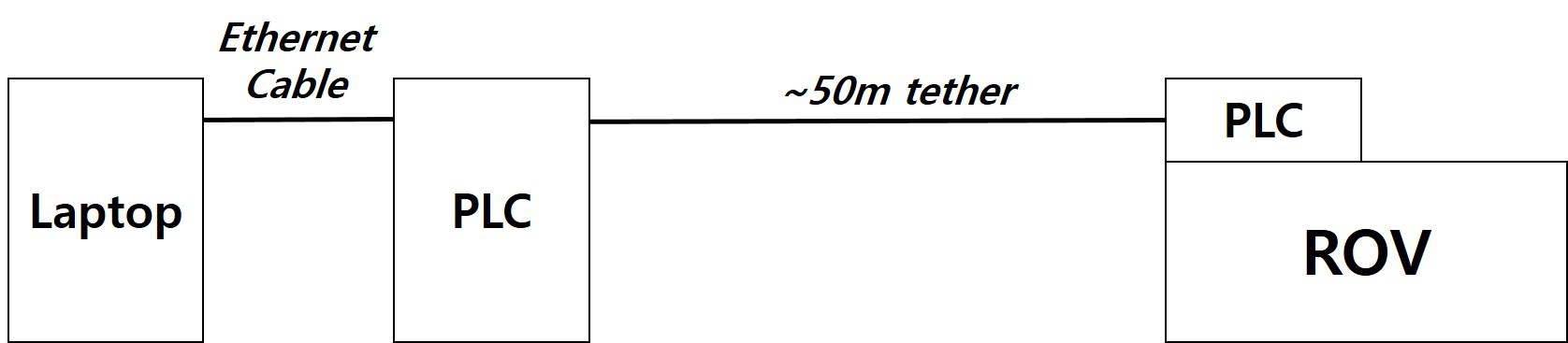
In the previous ROV, the signal through the power line was connected to the computer via plc module. But it was so uncomfortable for me because I have to carry the laptop and connect it to plc module through ethernet cable..
In order to eliminate this inconvenience, I have configured a system to access the ROV wirelessly by attaching a small router to the PLC module as shown below.
![]()
I used Netis travel 2 router because it is very small and cheap!
![]()
Now, after we can access to ROV via smartphone, I applied the gamepad that can be attached to the smartphone to make the operation easier.(iPega 9023)
![]()
![]()
-
About fish-eye lens camera
02/20/2017 at 06:35 • 0 commentsThe problem I felt while watching the streamed video was the narrow viewing angle of the ordinary pi camera.
So, a few days ago, I got a Pi Camera (g) with a fish-eye lens and tested.
![]()
Below is a picture with fisheye lens.
![]()
![]()
When compared the image between normal camera and fisheye camera, I could see that the latter showed a mush larger viewing angle. But I could see the distortion caused by the spherical effect appears on the edge of image.. I think I need to think about whether there is any improvement in this part.
![]()
![]()
-
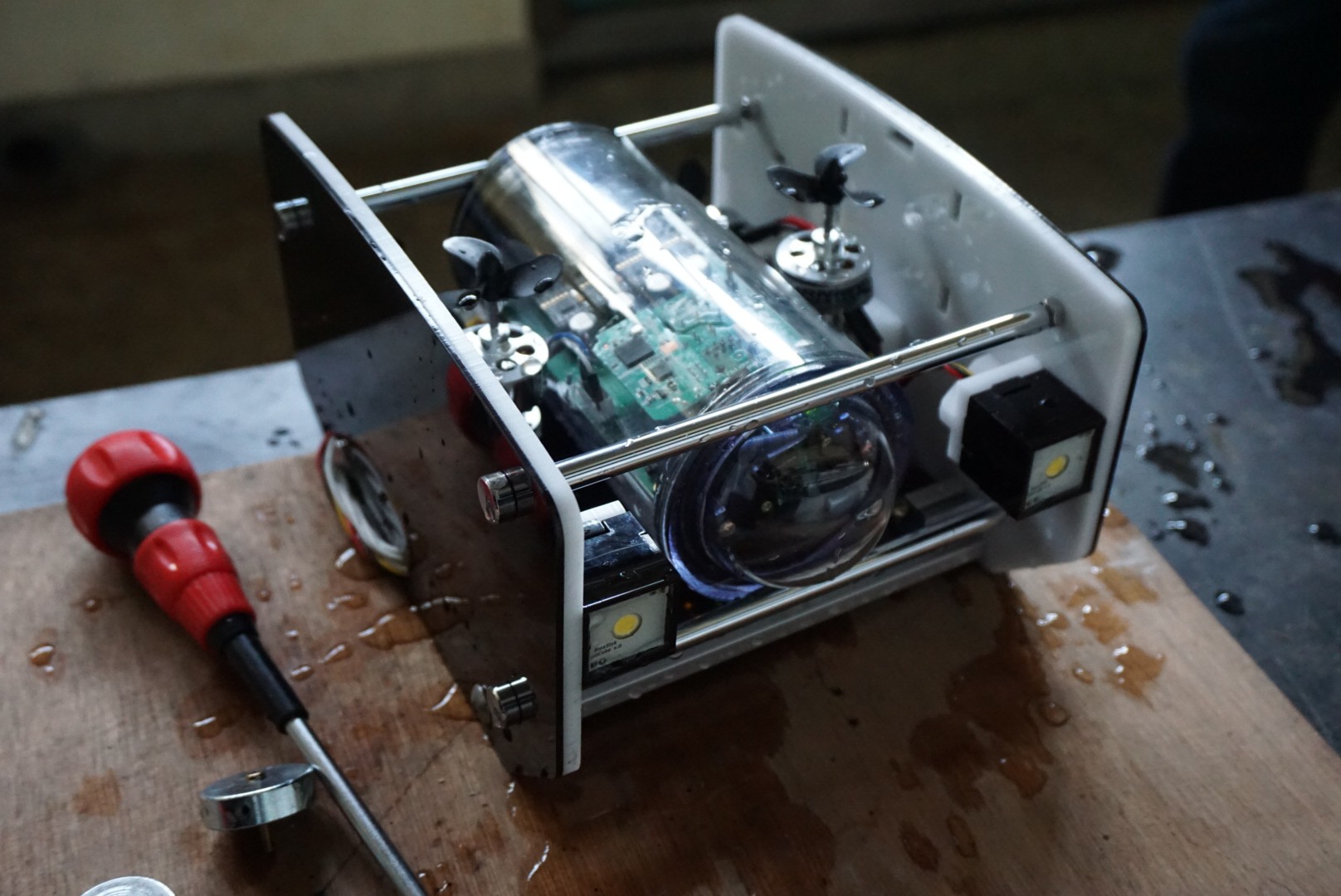
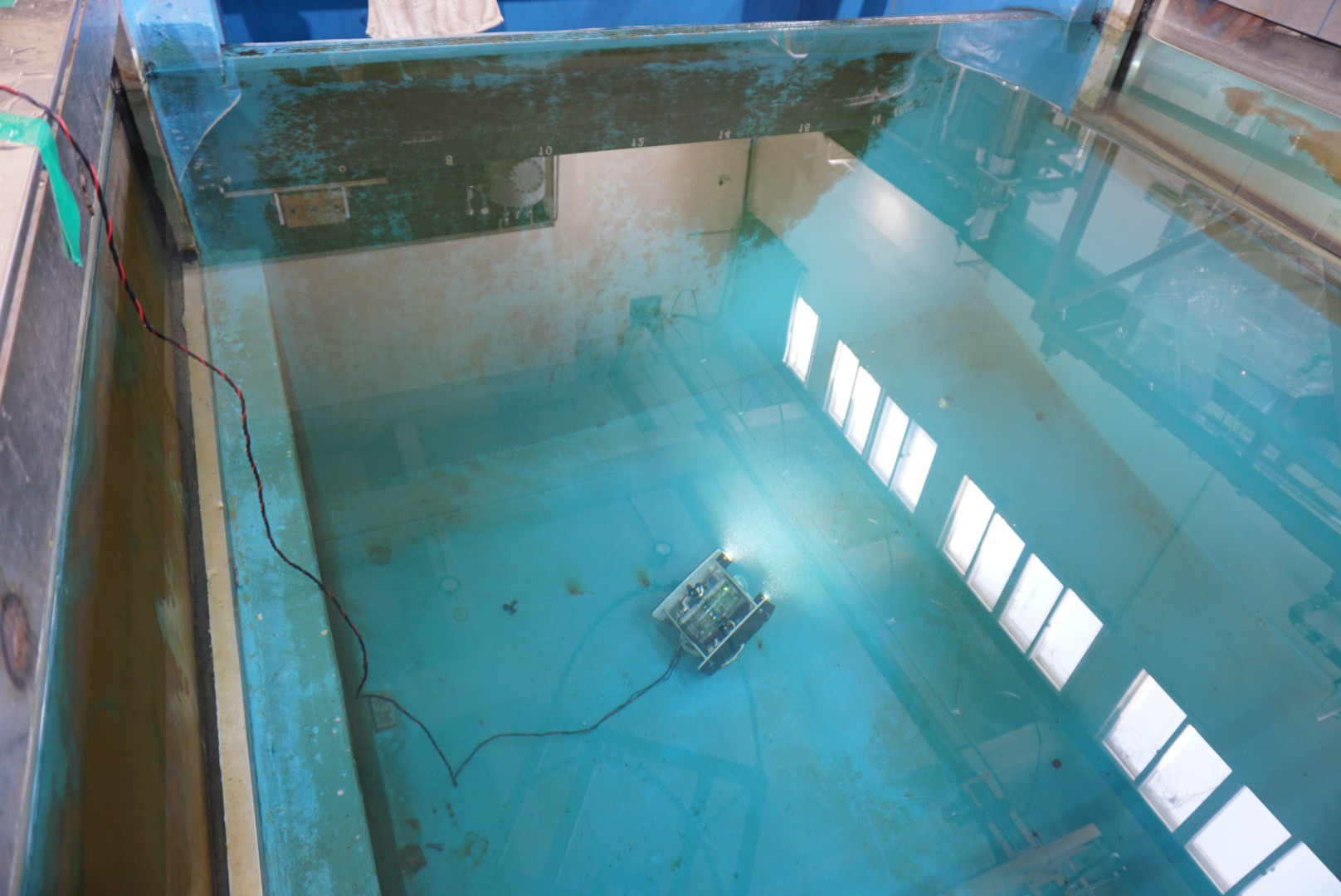
S-ROV First Dive
02/14/2017 at 04:23 • 0 comments![]()
![]()
Finally, we have tested for the first time in a large water tank!
You can get more information from the following link :).
http://forum.bluesink.io/t/s-rov-first-test-in-water/27/2?u=dydwo92
-
S-ROV first test in water!
02/09/2017 at 16:57 • 0 comments![]()
![]()
![]()
![]()
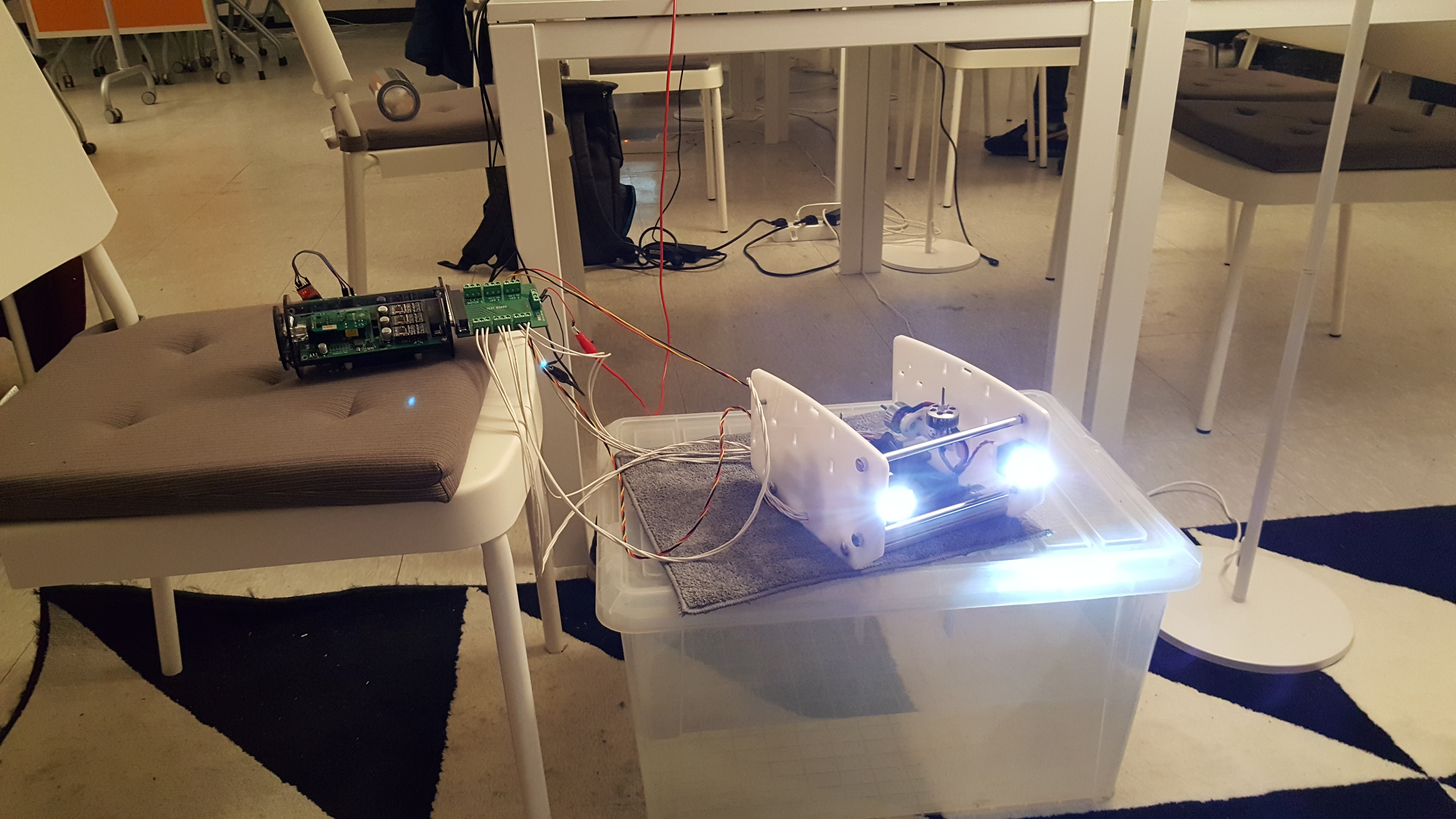
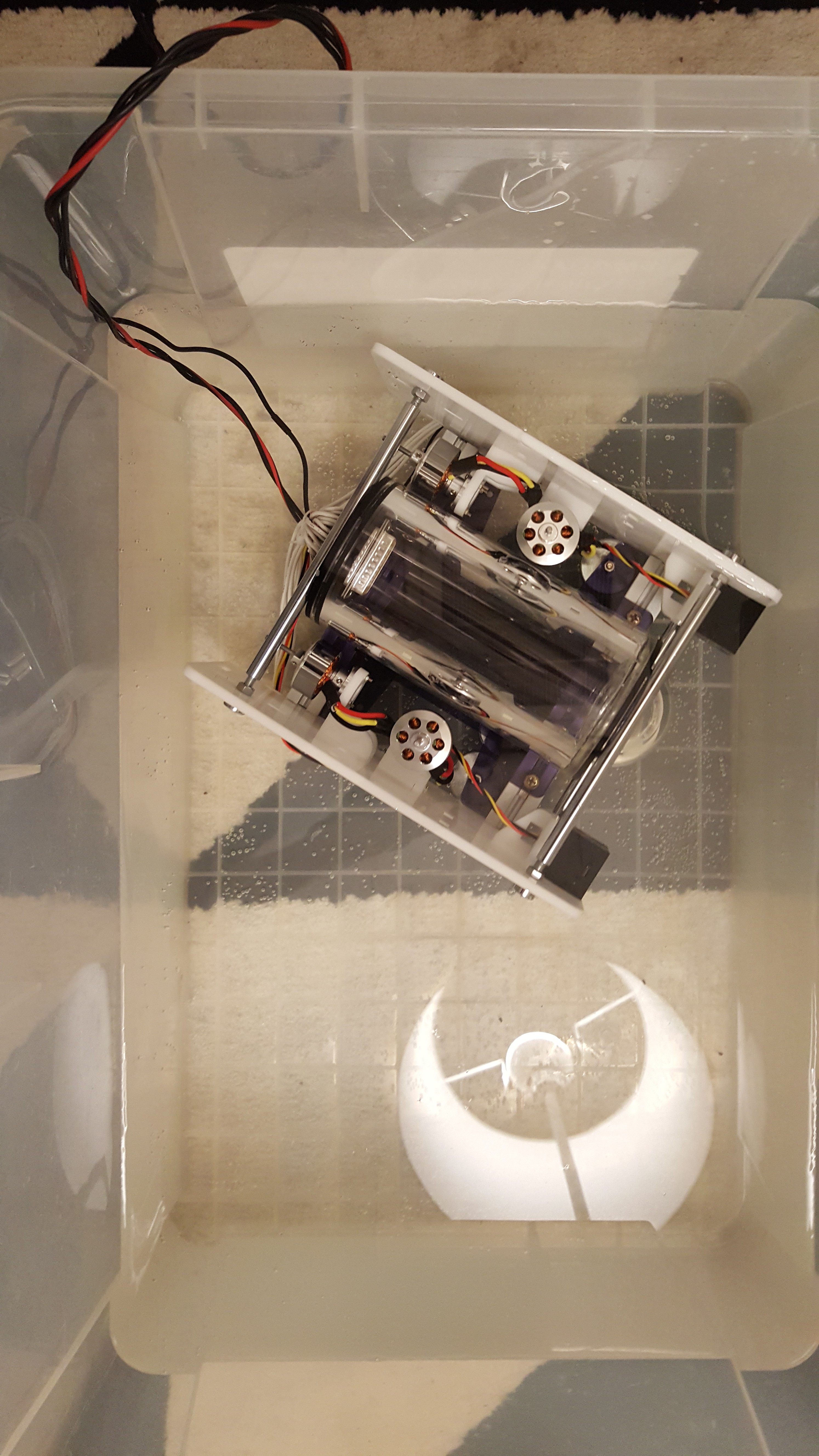
Finally, we integrated the hardware and electrical devices and tested it in a small tank. We confirmed that the motors and LEDs work well, and the video streaming also works well! Tomorrow, we will go to a large water tank and conduct various tests :). However, the propellers will be shipped next week, so the drive test will be available next week.
![]()
![]()
-
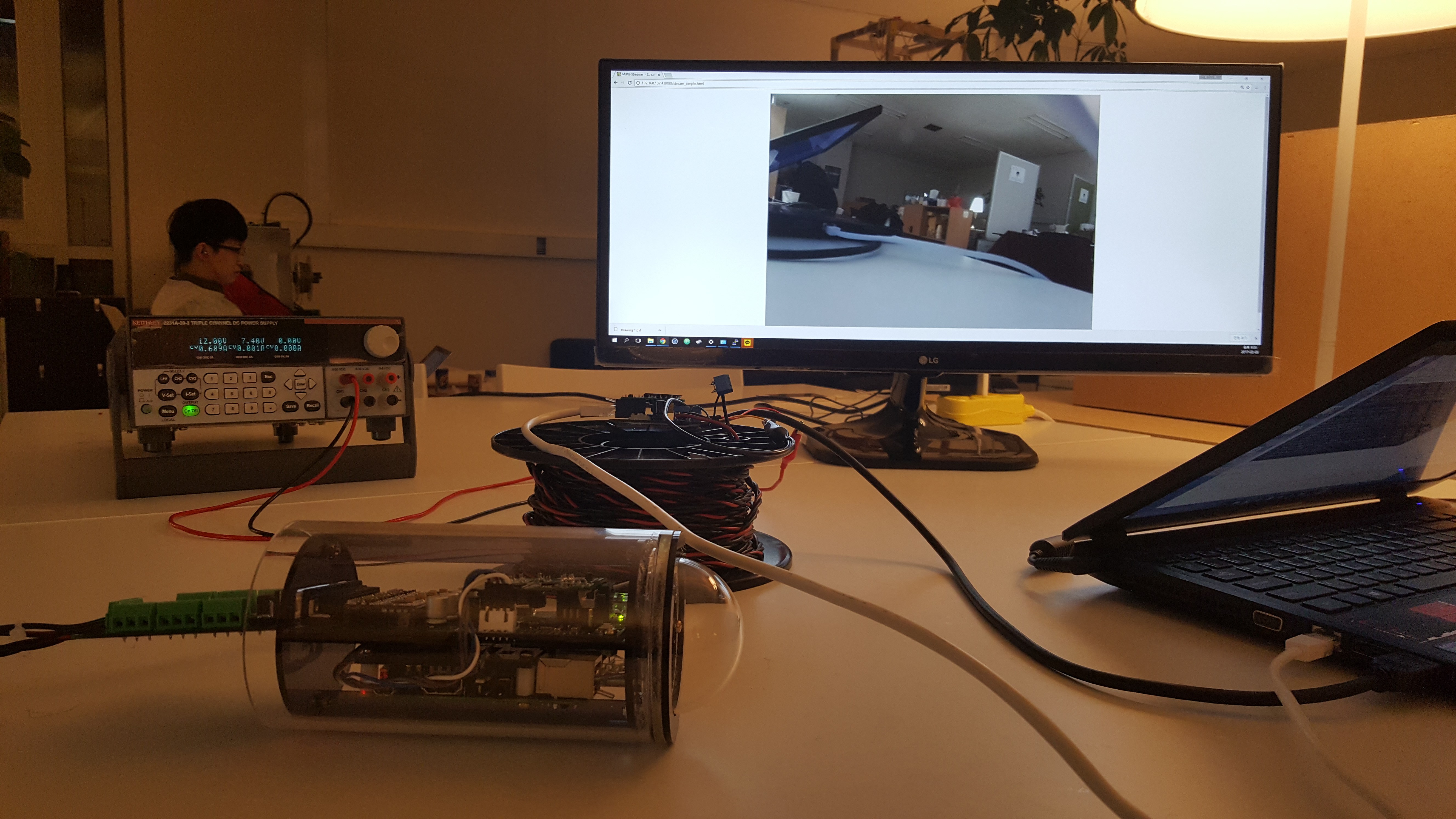
Video streaming test
02/05/2017 at 10:09 • 0 comments![]()
I streamed the video from the camera attached to the ROV through 50m tether. You can find more information from the link below :)
http://forum.bluesink.io/t/video-streaming-using-mjpg-streamer/24?u=dydwo92
![]()
-
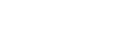
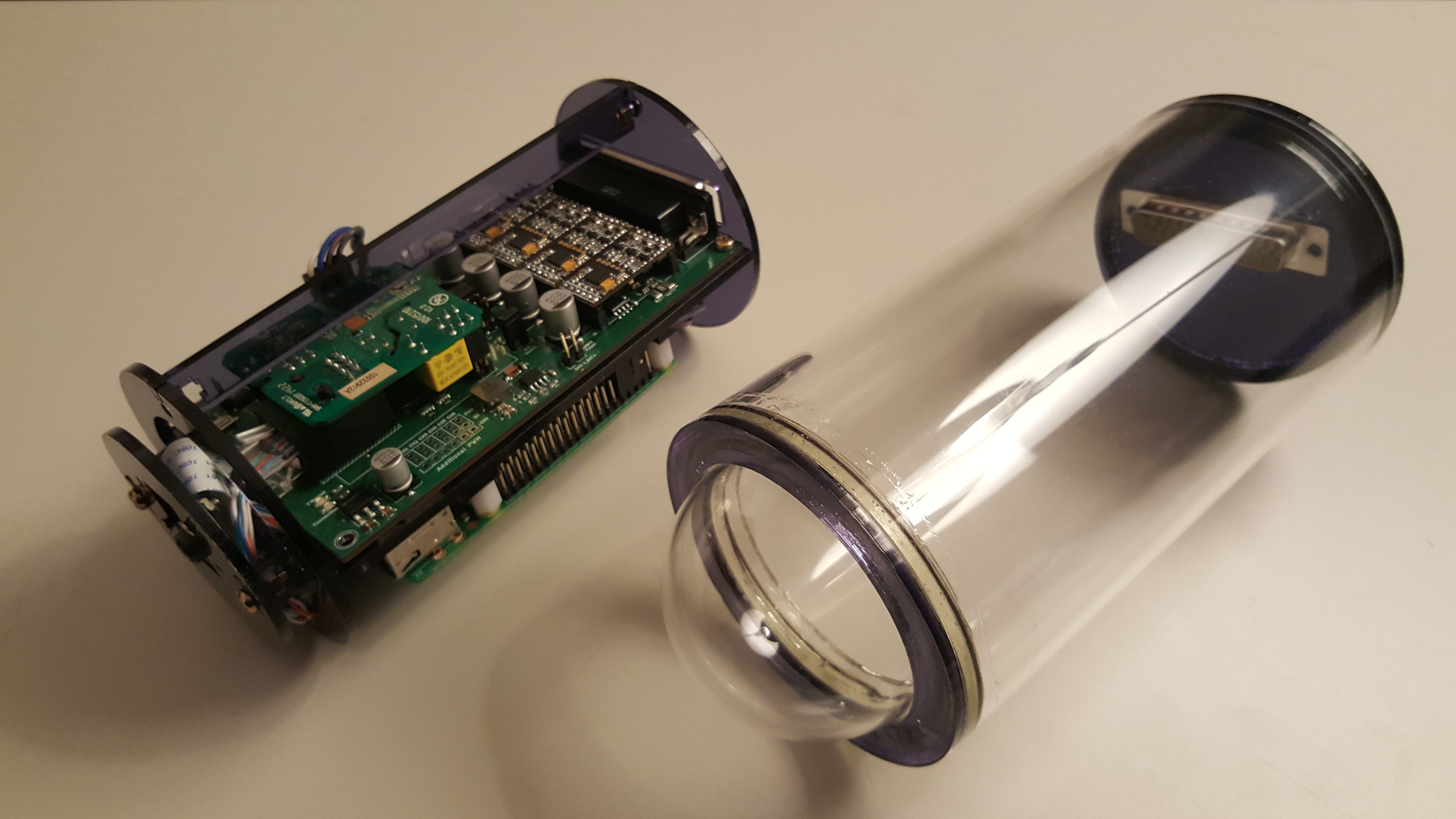
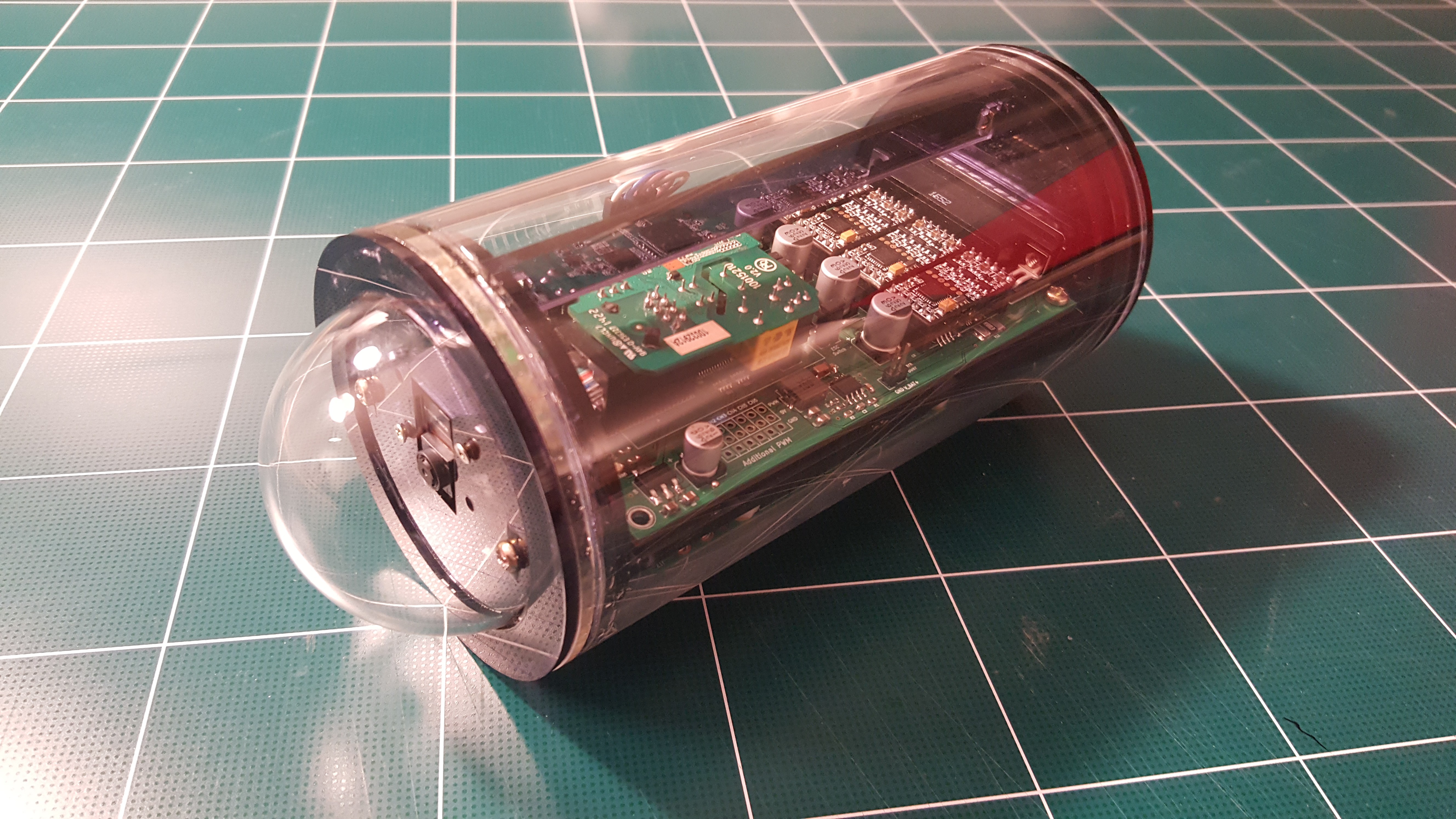
Assemble S-ROV controller & Main tube
02/05/2017 at 10:04 • 0 comments![]()
![]()
![]()
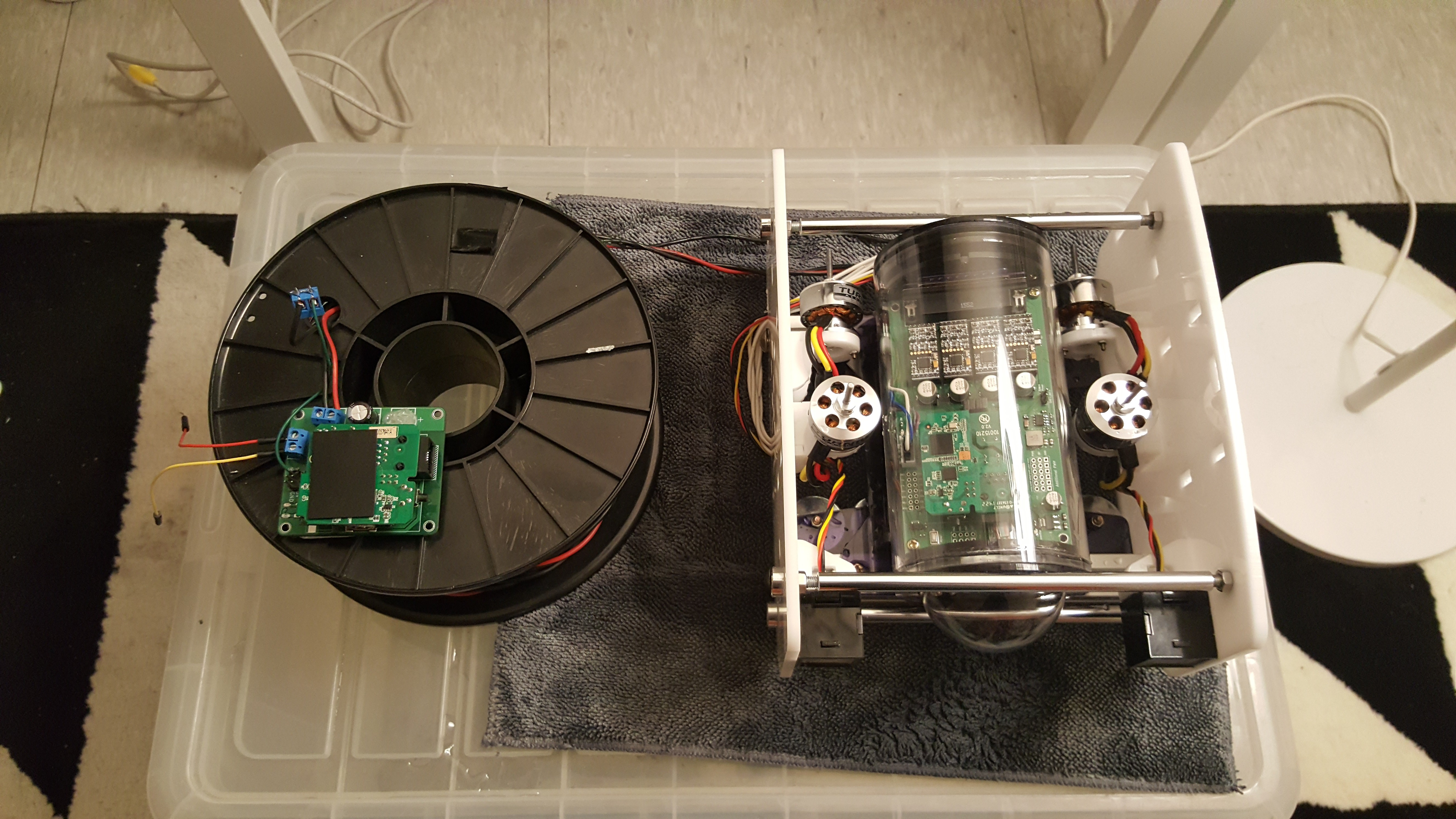
It's been updating in a long time :). In the meantime, there have been major electrical and hardware modifications. The control board has been redesigned to be more stable, and the front part of the main tube has been replaced with a hemispherical shape. I will replace the camera with a fisheye lens in the future. So it has been changed to hemisphere to make space. Detailed instructions about assembly and fabrication will be posted soon!
I have tested the waterproofing, and once I have confirmed that the water is not leaking. I'll test the waterproofing once again in a deeper water.
![]()
![]()
-
S-ROV controller v.0.1
01/20/2017 at 16:40 • 0 commentsS-ROV Controller v.0.0
S-ROV Controller v.0.1![]()
![]() The following items have been revised and supplemented.
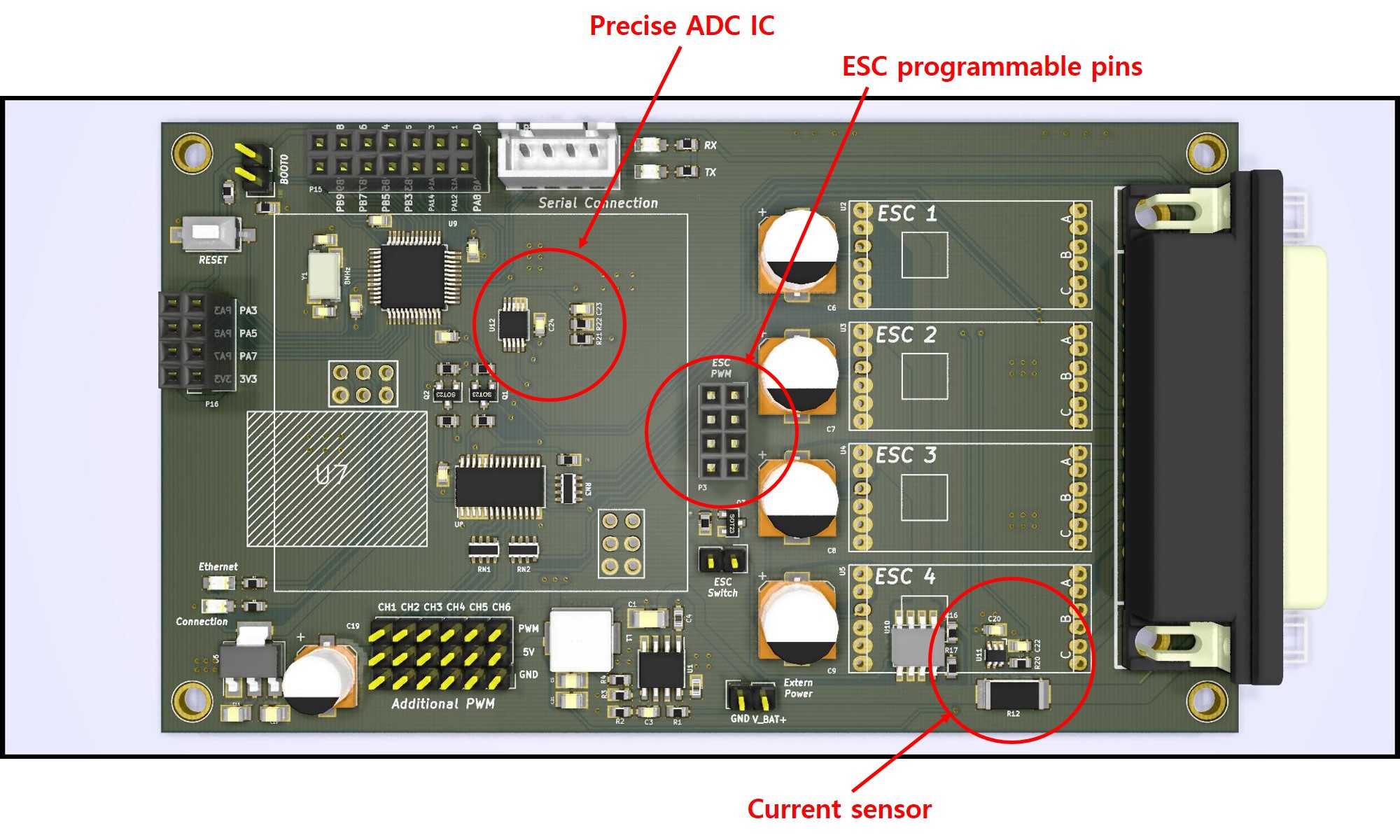
The following items have been revised and supplemented.- Power supply stabilization => Solve MCU reboot when ESC turns on, and implement circuit stabilization
- Adding voltage and current sensing => Excess voltage / current can be detected.
- Adding ESC programmable pins => Can change the firmware and settings of each ESC via UART.
I will test it next week :)
github : https://github.com/BlueSink/Electronics-MainBoard
![]()
-
S-ROV controller test
01/19/2017 at 05:55 • 0 comments![]()
![]()
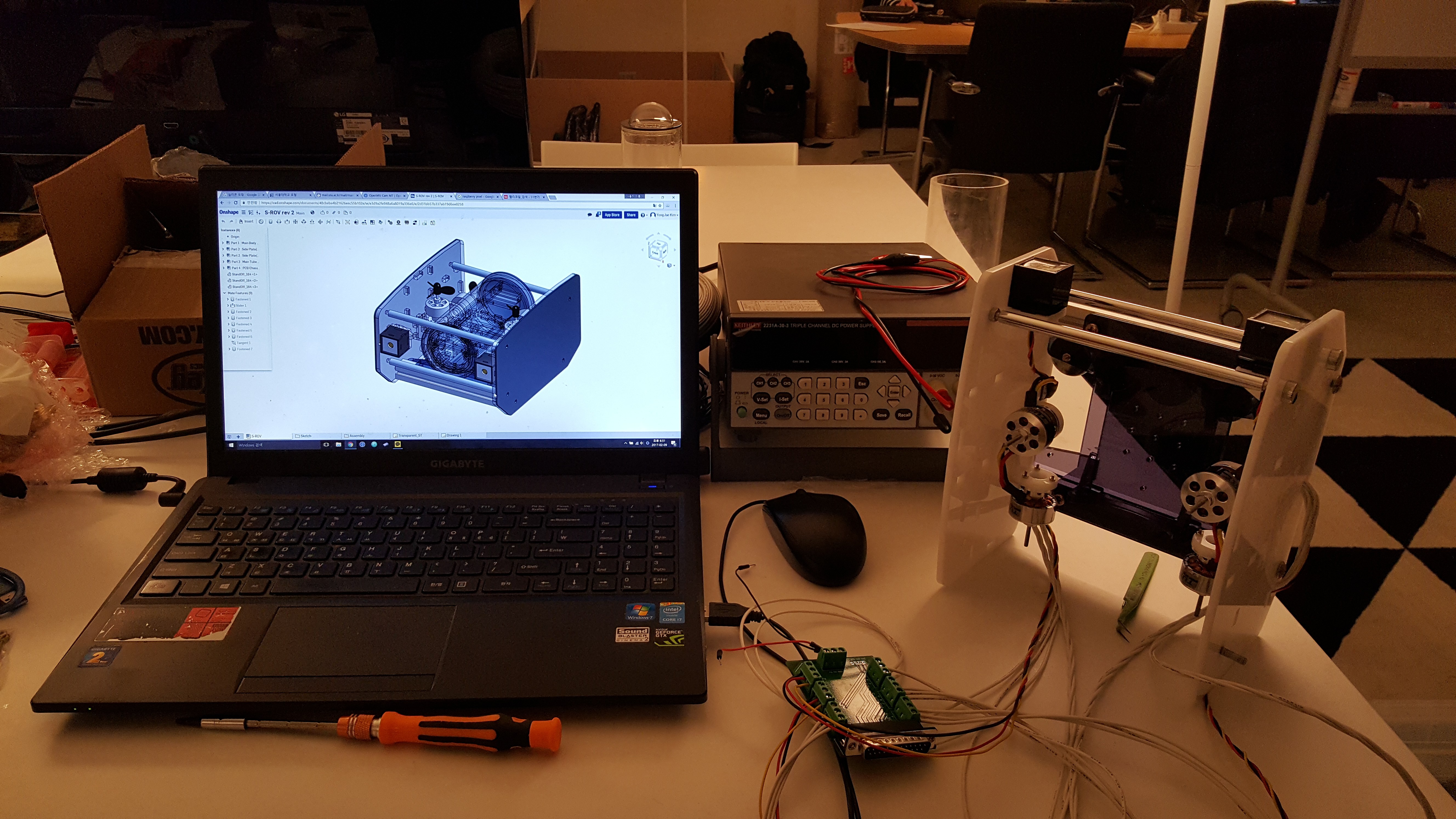
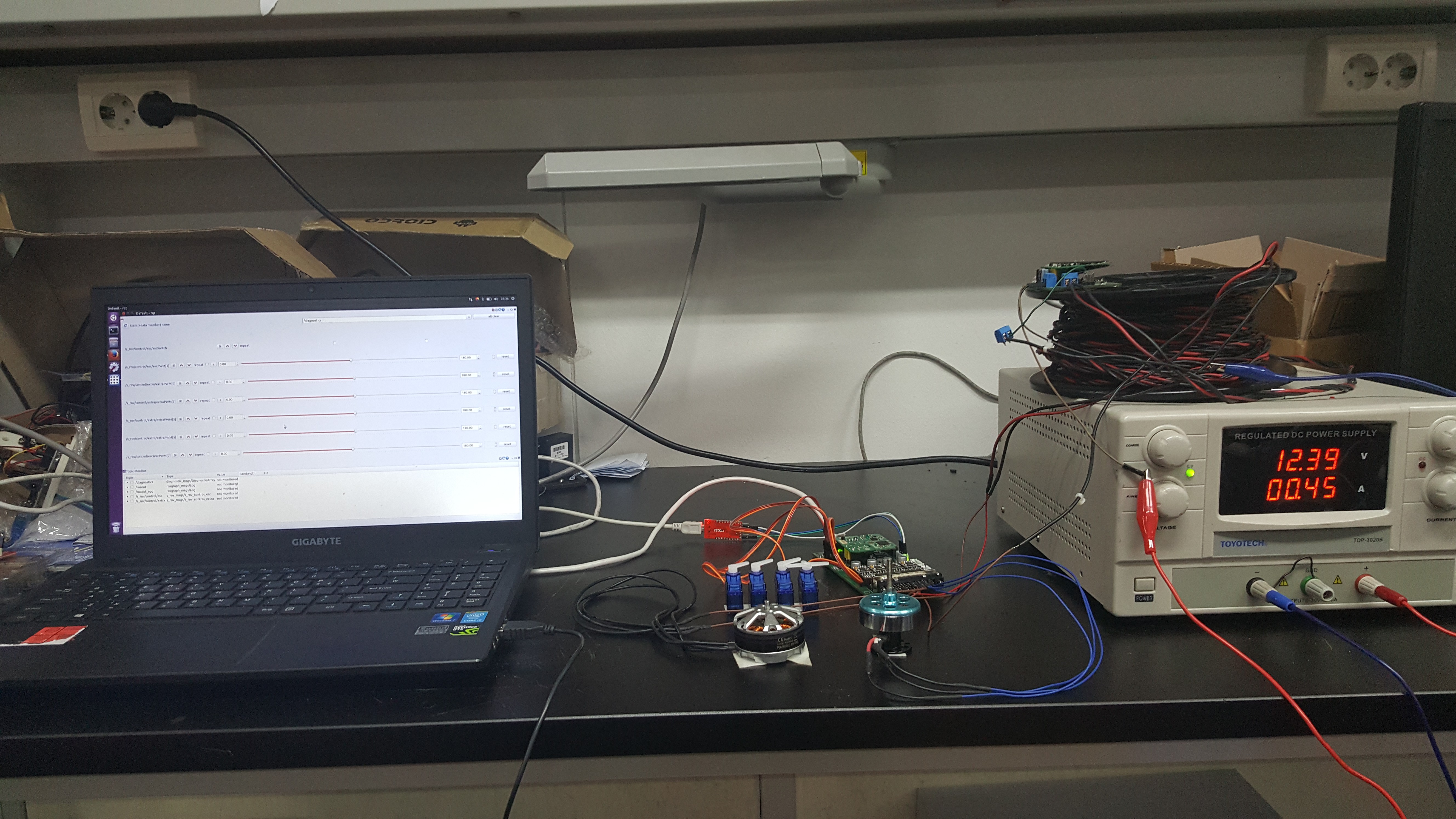
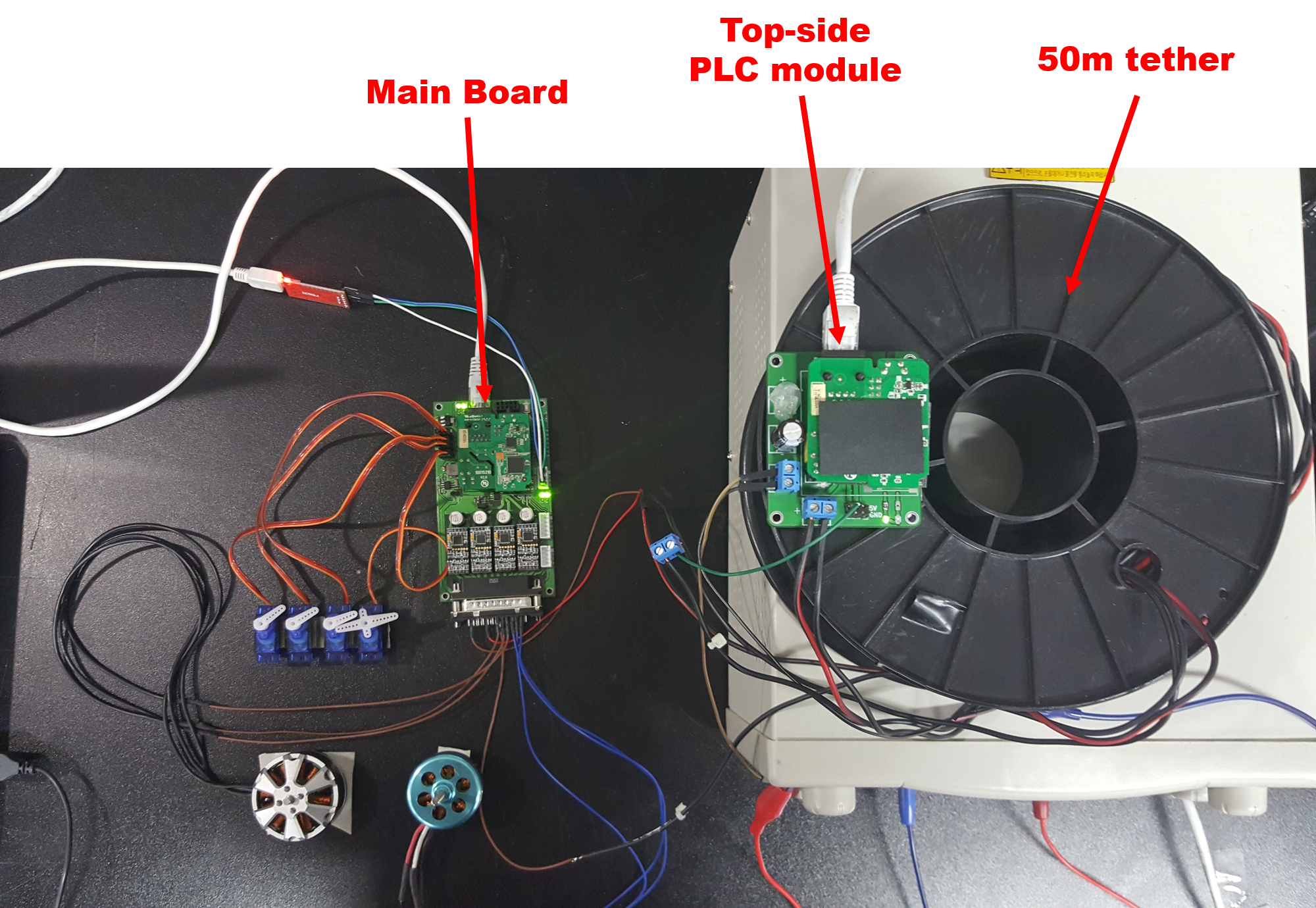
I have tested the main controller. The wiring is ,a bit complicated, but the following tests were conducted in the above situation.
1. PLC(Power Line Communication) availability
I checked the Ethernet communication through the 50m long wire and it works fine.
2. BLDC control
There are only two motors available at the moment, so I tested only two of them. To find out if a motor driver affects a sensitive part such as an MCU, I tried to input an excessive amount of motion, such as an excessive speed change in the motor, and it seemed to work well.
3. Additional PWM control
I tested several servo motors connected to the main board. There was no problem.
4. Complementary points
Here are some problems identified :
- When 4 ESC power is turned on, current is sucked into the capacitor connected to ESC, and voltage drop occurs. For this reason, the MCU is reset every time the ESC switch is turned on.
- ESC can be updated the firmware and settings through its pwm pin. But there was a problem that the ESC was not recognized by the computer because of the signal coming from the PWM driver.
- I am going to put voltage and current measuring devices to identify the state.
![]()
-
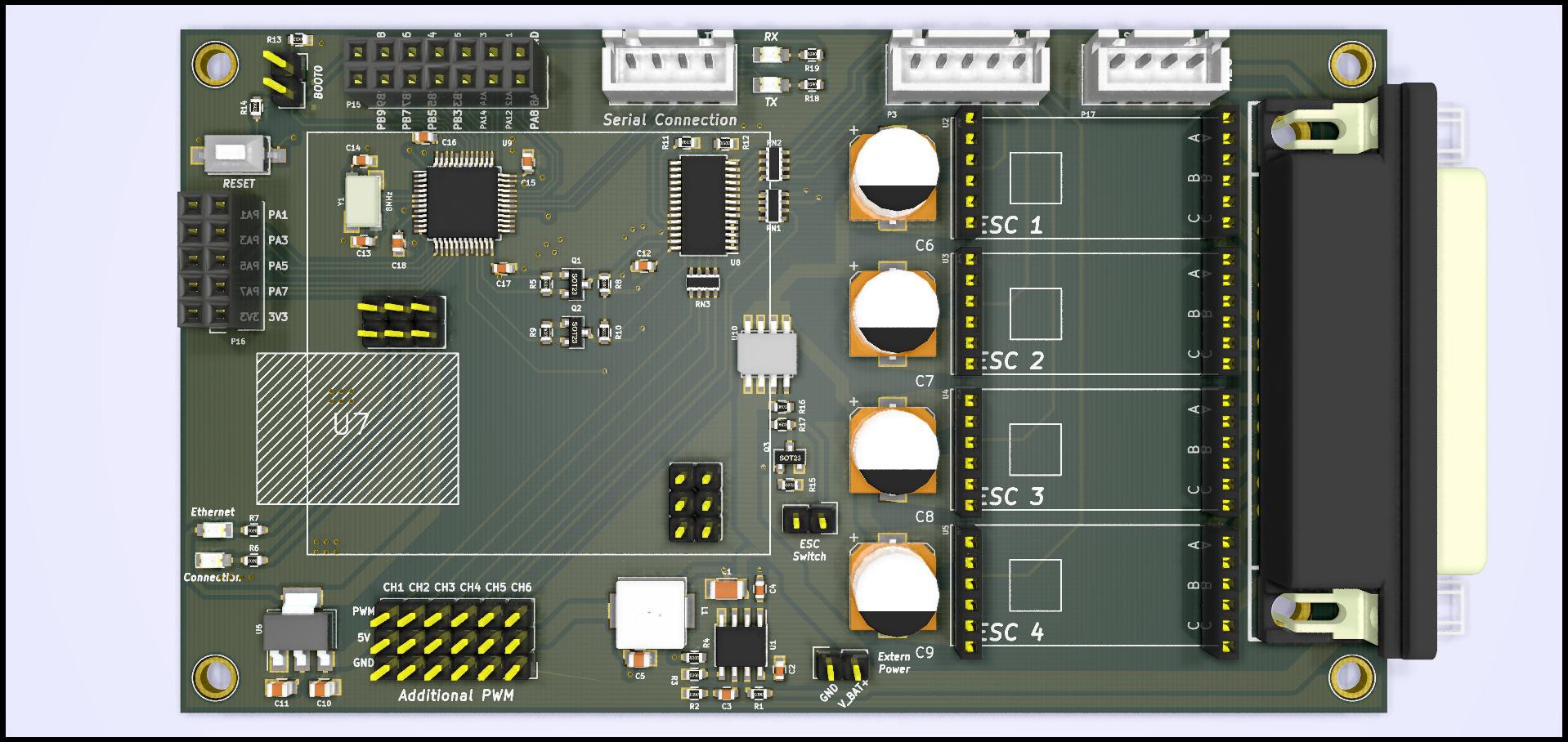
Main Controller v.0.0
01/16/2017 at 06:55 • 0 comments![]()
![]()
![]()
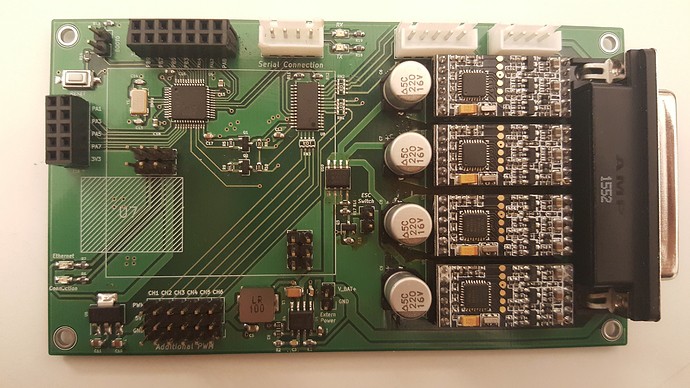
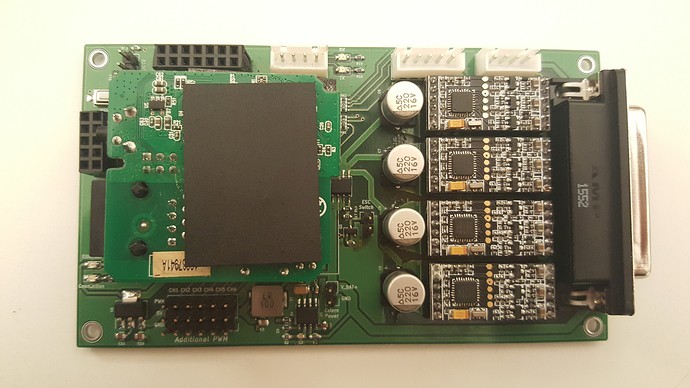
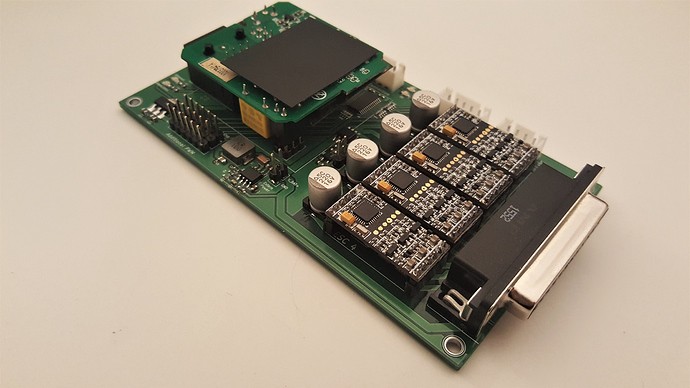
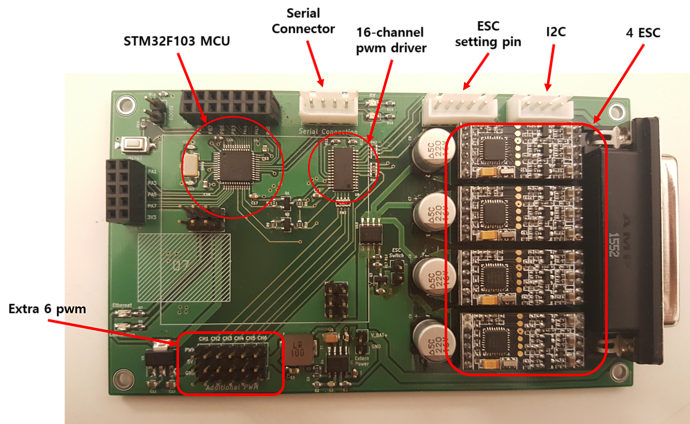
Finally I made the pcb! The main controller configuration is shown below, and I will test it as soon as possible. :)
![]()
![]()
-
S-ROV design
01/11/2017 at 16:00 • 0 comments![]()
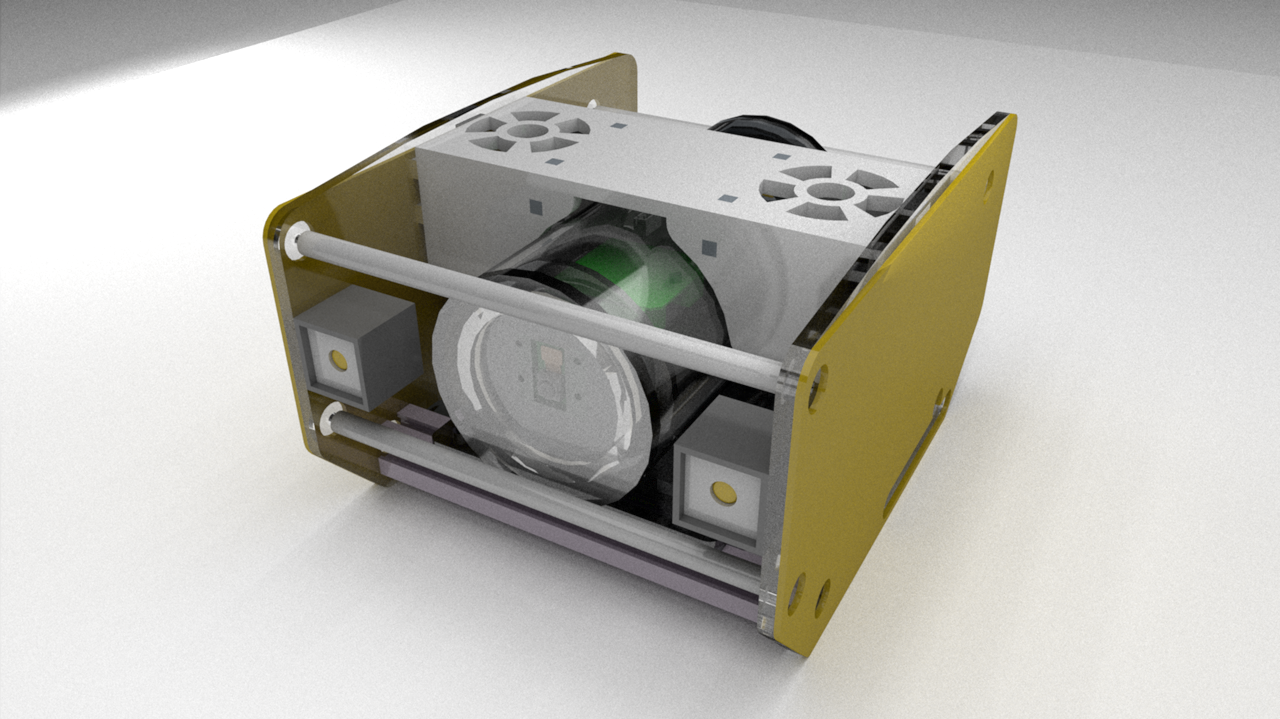
I'm currently supplementing the design of the rov... It is not yet finalized, but as the specification becomes more and more definite, the design is being completed.
The cad files are open to Onshape.
![]()