 kodera2t
kodera2tThis information below is obsolete, due to official support of RTL8710 by Realtek is done. Please see my update (it gets quite easy!!)
Here I would like to introduce how to arrange programming environment. Indeed most part is contributed by lvvx, RtlDuino project and I just change the way from JTAG to SWD.
Step 1 : Add Ameba (Realtek) support in your Arduino IDE by board manager.
Putting
https://github.com/Ameba8195/Arduino/raw/master/release/package_realtek.com_ameba_index.jsonAdditional board manager is enough to see

Detailed procedure is explained in Realtek's homepage.
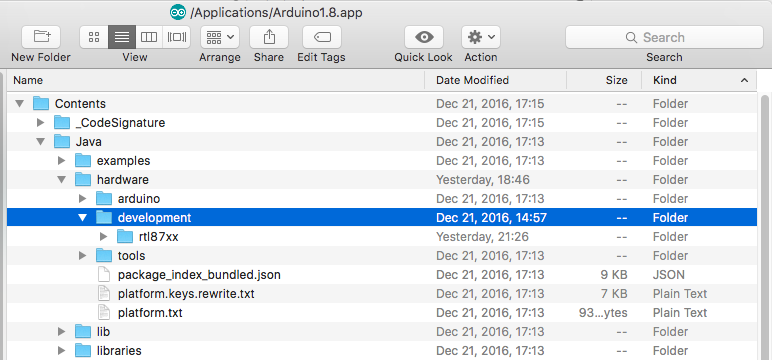
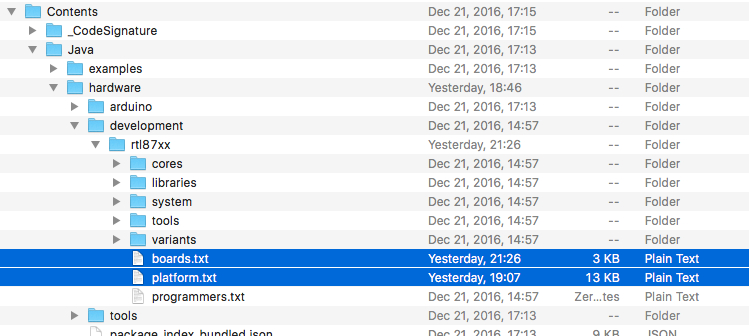
Step 2: Add RTL8710 support in your Arduino IDE by copying required items.
This process is not automatic, firstly we need to download files from lvvx, RtlDuino project.
menu.device_variant=Variant
menu.upload_method=Upload method
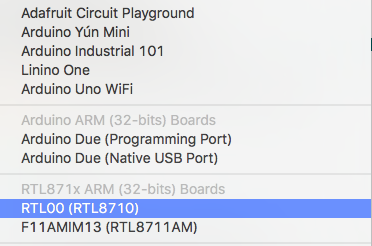
rtlmodule_rtl8710.name=RTL00 (RTL8710)
rtlmodule_rtl8710.vid.0=0x2341
rtlmodule_rtl8710.pid.0=0x003d
rtlmodule_rtl8710.upload.tool=ameba_tools
rtlmodule_rtl8710.upload.protocol=mbed_dap
#rtlmodule_rtl8710.upload.protocol=jlink
rtlmodule_rtl8710.upload.maximum_size=372736
rtlmodule_rtl8710.upload.use_1200bps_touch=false
rtlmodule_rtl8710.upload.wait_for_upload_port=false
rtlmodule_rtl8710.upload.native_usb=false
rtlmodule_rtl8710.build.mcu=cortex-m3
rtlmodule_rtl8710.build.f_cpu=166666666L
rtlmodule_rtl8710.build.usb_product="Module RTL8710"
rtlmodule_rtl8710.build.board=rtlmodule
rtlmodule_rtl8710.build.core=arduino
rtlmodule_rtl8710.build.extra_flags=-mthumb -DBOARD_RTL8710
rtlmodule_rtl8710.build.ldscript=linker_scripts/gcc/rtl8710-symbol-v03-img2_arduino_arduino.ld
rtlmodule_rtl8710.build.variant=rtl8710
#rtlmodule_rtl8710.menu.upload_method.jlinkram=JLink RAM
#rtlmodule_rtl8710.menu.upload_method.jlinkram.upload.protocol=jlink
#rtlmodule_rtl8710.menu.upload_method.jlinkram.upload.tool=jlink
#rtlmodule_rtl8710.menu.upload_method.jlgdbimg=JLink IMG
#rtlmodule_rtl8710.menu.upload_method.jlgdbimg.upload.protocol=jlgdbimg
#rtlmodule_rtl8710.menu.upload_method.jlgdbimg.upload.tool=jlgdbimg
#rtlmodule_rtl8710.menu.upload_method.jlgdbota=JLink OTA
#rtlmodule_rtl8710.menu.upload_method.jlgdbota.upload.protocol=jlgdbota
#rtlmodule_rtl8710.menu.upload_method.jlgdbota.upload.tool=jlgdbota
#rtlmodule_rtl8710.menu.upload_method.networkota=Network OTA
#rtlmodule_rtl8710.menu.upload_method.networkota.upload.protocol=network
#rtlmodule_rtl8710.menu.upload_method.networkota.upload.tool=networkIn the "platform.txt", I added several lines for DAP support
# rtlmodule Uploader tools
# -------------------
tools.ameba_tools.upload.params.verbose=
tools.ameba_tools.upload.params.quiet=
tools.ameba_tools.upload.pattern="{runtime.tools.ameba_tools.path}/upload_dap.sh" {upload.verbose}
tools.ameba_tools.upload.pattern.windows="{runtime.tools.ameba_tools.path}/upload_dap.exe" "{runtime.tools.ameba_tools.path}\ram_all.bin" {upload.verbose}
tools.ameba_tools.upload.pattern.macosx="{runtime.tools.ameba_tools.path}/upload_dap_mac" "{runtime.tools.ameba_tools.path}/ram_all.bin" {upload.verbose}
tools.ameba_tools.upload.network_pattern="{runtime.tools.ameba_tools.path}/upload_ota.exe" -i "{serial.port}" -p "{network.port}" -f "{runtime.tools.ameba_tools.path}\ota.bin"
tools.ameba_tools.upload.network_pattern.windows="{runtime.tools.ameba_tools.path}/upload_ota.exe" -i "{serial.port}" -p "{network.port}" -f "{runtime.tools.ameba_tools.path}\ota.bin"
tools.ameba_tools.upload.network_pattern.macosx="{runtime.tools.ameba_tools.path}/upload_ota_mac" -i "{serial.port}" -p "{network.port}" -f "{runtime.tools.ameba_tools.path}/ota.bin"These two files modification will change the way from JTAG to DAP. FINISHED!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.