 Yuchong Li
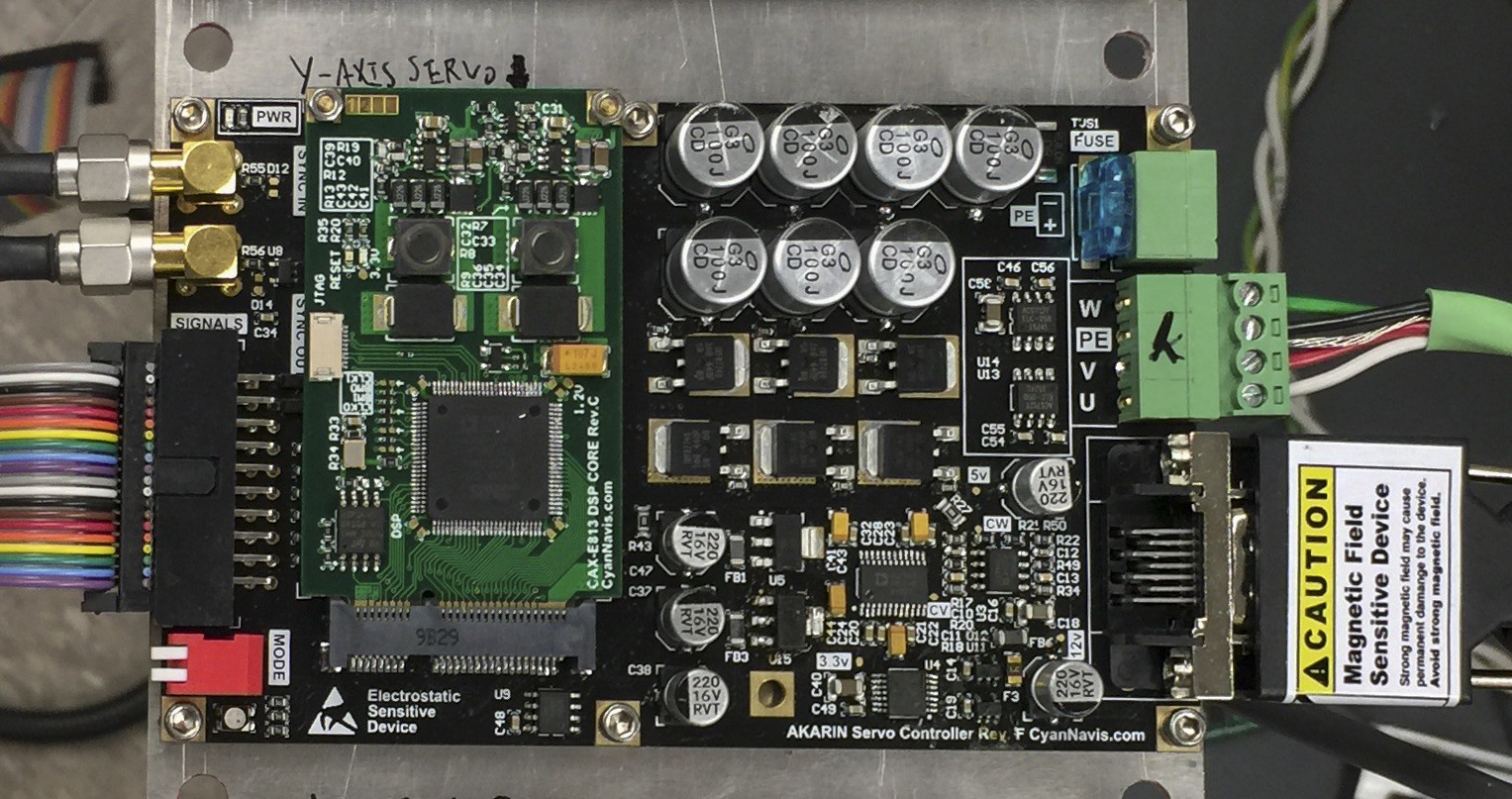
Yuchong LiAkarin Servo PCB (Rev. F)
- Processor: ADSP-21479 floating point DSP
- Bus voltage(max): 60v
- Output power(max): 400W
- Modulation frequency(max): 24000Hz
- Servo mode: position, velocity, torque
- Encoder resolution: 14bit
- Modbus-RTU over RS-485
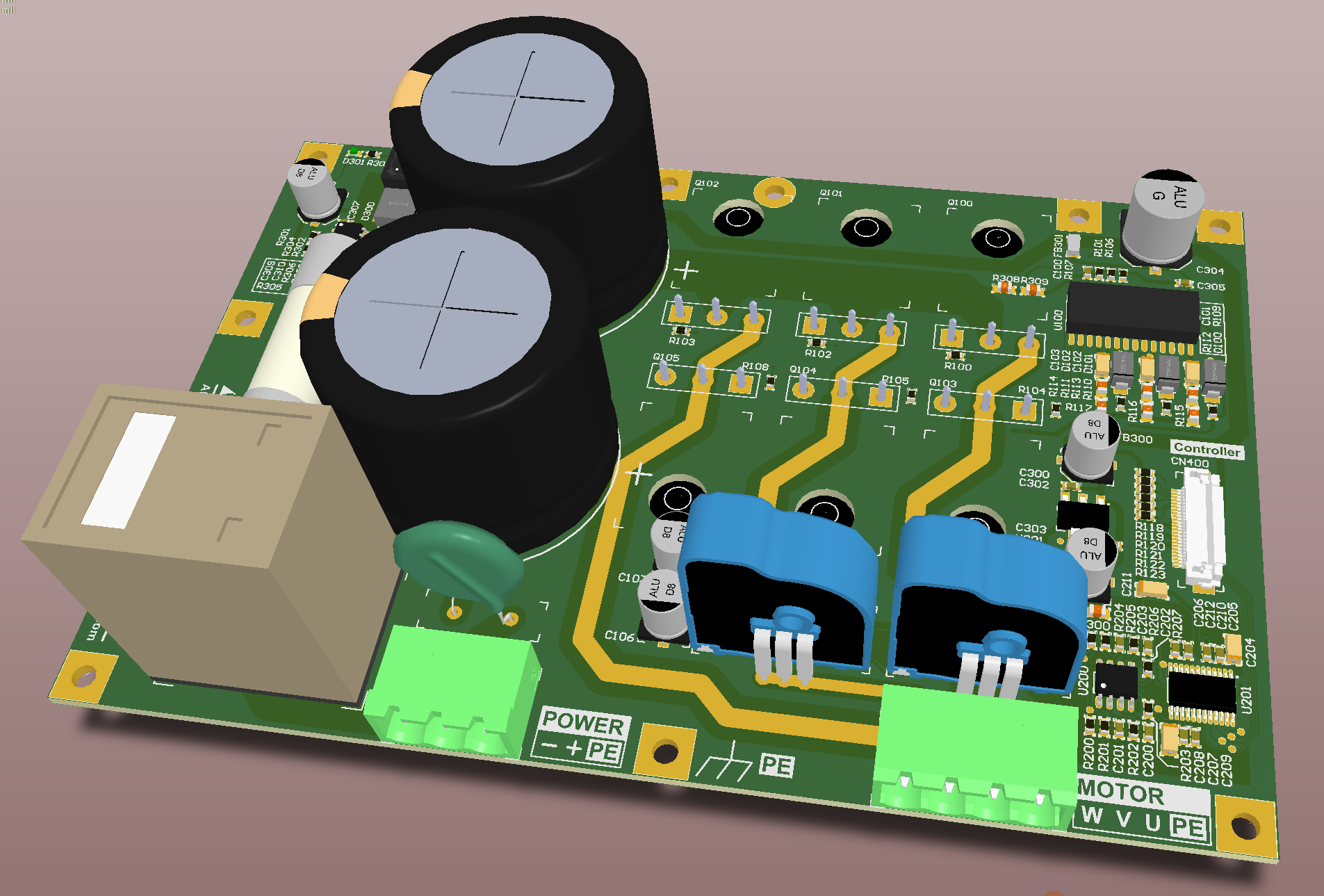
Features:
- Motor state estimation using the Kalman filter
A Kalman filter is utilized to estimate the kinematic state of the motor. Smooth velocity estimation is accomplished to achieve high performance velocity control, even at very low speed.
- Real-time vibration detection and suppression
The hardware FFT accelerator provided by the digital signal processor is utilized to analyze the error signal. Ten IIR notch filters are tuned in real-time based on the FFT result to detect and suppress mechanical vibration.
- Jerk limited trigonometric velocity profile
A trigonometric velocity profile with jerk limitation is applied in the trajectory generation and interpolation for optimum kinematic performance.
- Space vector modulation(SVPWM) / Field orientation control(FOC)
The modulation method applied is FOC based on SVPWM.
Multi-axis synchronized motion test
A multi-axis CNC milling machine is built to test the servo drives. It has 6 degrees of freedom - X, Y, Z, A, B and spindle. All axes are driven by AKARIN AC servos. X, Y, Z servos are rated 200W, A axis is rated 125W, B axis is rated 150W and spindle is rated 400W.
In this demonstration, two pencil leads were chucked onto the A axis, a flange with corresponding holes and two screws was installed on the spindle servo. A series of complicated motions were implemented using the AKARIN servos, running at very high speed(up to 3000RPM), without breaking the pencil leads.
High speed arc interpolation
Drawing demo








 Arduino KIT
Arduino KIT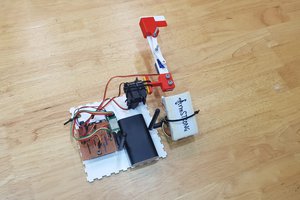
 Juin Lee
Juin Lee
 Rob Shearer
Rob Shearer
 Holotype Robotics
Holotype Robotics
Hello all. It seems she author doesn't respond to questions anymore. Please, if someone managed to get some practical information and has an advise on how to build this thing it will be very much appreciated. Please contact me or leave contact information and I will call (write) back. Thanks