Jason Wright
Jason Wright*It would be ideal to use the timestamps encoded in GPS messages, but our module had issues with this.
0%
0%
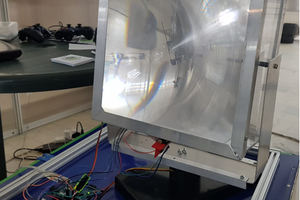
Heliowatcher - Solar panel alignment system
The Heliowatcher calculates the position of the sun using GPS and LEDs, and orients a solar panel to find maximally efficient paths.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Yevhenii
Yevhenii
 Nait Malek Youssef
Nait Malek Youssef