 deʃhipu
deʃhipuAn advantage of having several similar projects, some long-term and some faster, is that the research and innovation you test in the fast projects can trickle back into the slower ones. This is one such example. When I started with this, I was mostly using ready modules for most things, and the PCB was just a way to hold things together. After some intensive development of #µGame, #PewPew Standalone and #Kubik M0, however, I figured out some ways of doing some of those things better with discrete components and with better mechanical design. So it's time to make a new version that will include all those improvements.
Here it is:
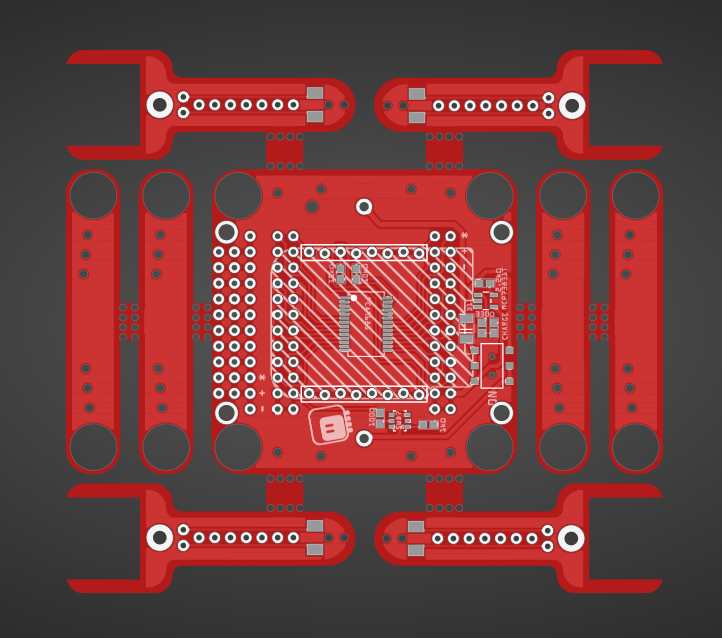
There has been changes. The D1 Mini footprint and the servo sockets have been rotated 90° degrees, so that the front of the robot is now to the left. That means that the battery is now sideways, and there is more room under the robot to fit the servos when the legs are in extreme positions (it will still require cutting off those "ears" from the servos). The body is still 5×5cm, but there are all those leg parts around it, so now the whole PCB is 10×10cm — which reflects the current reality of ordering cheap PCBs. It's the same idea as in #Kubik M0, however, the feet now have footprints for switches, so we can detect ground easily.
There is no room for the battery protection and charging module anymore, instead there is a charging and a protection circuit directly on the PCB. I'm using a double switch for power, because when it switches off the power from battery, it also switches on the charging — this way I can use one USB port for both programming and charging. The servo sockets are rotated now, and stretched along the battery holder, so that they can go on the bottom of the robot and still leave enough room for the servos to rotate. I also added back some small prototyping area at the front of the robot, for mounting sensors, and also on the legs.
Otherwise it's all standard stuff: a PCA9685 chip for PWM, a LiPo battery for power, and a socket for a D1 Mini to control it all.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.