 eric
ericHello everyone, my name is Eric. You guys are gonna be hearing from me a lot in the coming weeks and months. Let me explain who I am before we jump into things, not that there's much to talk about... yet. I am an employee for Barnabas robotics and am currently one of the Barnabas robotics employees working on residency at the magnificent Supply Frame Design Lab. I know I sound like a kiss ass, but seriously for a nerd like myself this place is basically a bounce palace. Anyway, we are working to refine our robot kit, the Barnabas bot, and ready it for production. You can see a few Barnabas bot creations here if your interested. I am personally tasked with creating a PCB specifically constructed to fit on the Barnabas bot and be completely integrated with an appropriate Arduino micro controller, and I'm in over my head. I've got electronics experience but somehow this project makes me feel like I've gone from little league to the big leagues in the blink of an eye. The good news is I have a great support staff over at Supply Frame as well as Ryan and Edward at Barnabas, and that will go a long way.
So what's the game plan? Well this is day one for me so the game plan is pretty simple;
- Learn KiCAD (because eagle is bad) -the software
- Learn how to use an othermill -the hardware
- Use that knowledge to make a simple PCB so I can pat myself on the back
- Find an appropriate Arduino schematic (probably the uno) and add the appropriate pieces to give the Barnabas bot the functionality it currently has, or perhaps more.
- More pats on the back
- Produce a few and test them
- Iterate as necessary
So, being this is day one all I have done is start to learn KiCAD, which I can already tell is way better than eagle. That being said, learning any new software is a bit of a climb, and I was about as lost as I always am;

Luckily Dan has already shown how valuable he is by pointing me towards contextual electronics, who I suggest you check out if you want to learn KiCAD. In particular I am using this tutorial to get started. Incredibly simple, but you gotta start somewhere. I've gotten to this point so far;
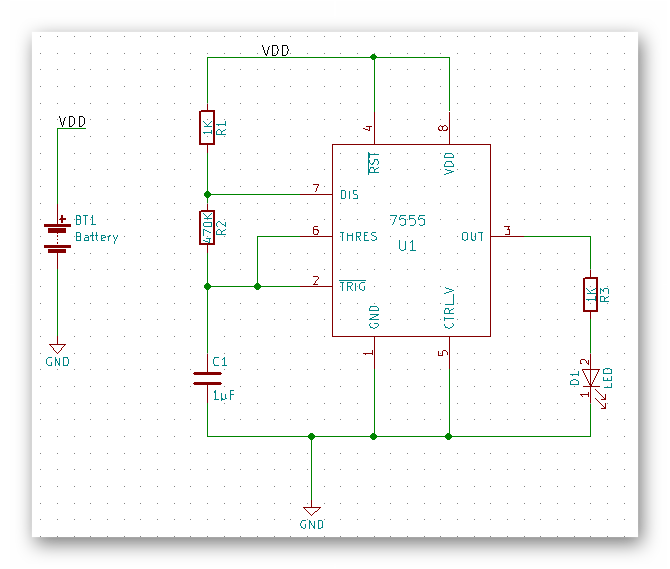
So this is essentially the full schematic of my 'practice' PCB. This was fairly easy for me, but I imagine creating and routing the .brd file is where I'll hit some roadblocks and potentially throw some chairs. I'll let you guys know how that goes next week.
Before I take off I want to thank Dan and Edward in particular for this fantastic opportunity. I also want to talk about Barnabas robotics, our mission, our goals, our values, etc. But I won't do that. Instead I'll link you to our website: https://www.barnabasrobotics.com/, and tell you to keep an eye out for Ed, I'm sure he'll be posting on this project a ton, and he is far more charismatic than I am. The company is his vision and I think it's far better if you hear about it from his point of view than mine.
Till next time
-Eric
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.